Можно импортировать модель URDF в Simscape™ Multibody™ окружения. Процесс импорта происходит в один шаг на основе smimport функция. smimport функция преобразует модель URDF непосредственно в эквивалентную модель Simscape Multibody.
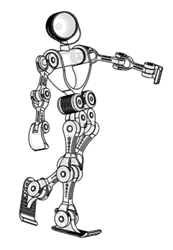
В этом примере показано, как импортировать Onshape® модель человекоподобной сборки робота. Модель содержит различные части («ссылки» на жаргоне URDF), представляющие туловище, голову и конечности робота. Детали соединяются через шарнирные и сварные соединения («непрерывные» и «фиксированные» соответственно). Эта модель идентична модели, показанной в Import a Onshape Humanoid Model. Можно открыть модель из MATLAB® командная строка путем ввода команды:
open sm_humanoid.urdf
Модель схемы
Используйте smimport функция для импорта модели URDF:
urdfModel = 'sm_humanoid.urdf'; smimport(urdfModel);
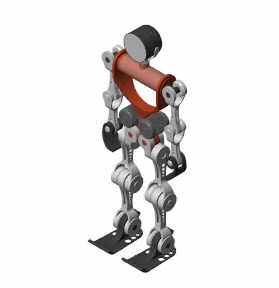
Функция генерирует модель Simscape Multibody робота. Расширение файла необходимо для идентификации файла импорта как URDF. Обновите импортированную модель (на вкладке Modeling, нажмите Update Model.), чтобы открыть статическую визуализацию в исходном состоянии. Рисунок показывает результаты.
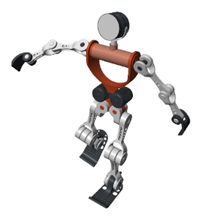
Основывайтесь, например, на модели, путем добавления систем управления для приведения в действие различных соединений. В качестве управляемого примера в командной строке MATLAB введите sm_import_humanoid_urdf. Симулируйте модель, чтобы просмотреть простую анимацию.