Соединения накладывают между телами основные кинематические ограничения, которые определяют, как они могут перемещаться относительно друг друга. Соединение может быть физическим соединением, таким как соединение между корпусом и валом линейного гидравлического привода, или виртуальным соединением, таким как соединение между Землей и Луной. В Simscape™ Multibody™ вы моделируете оба типа соединений с помощью блоков соединений.
Примеры физических и виртуальных соединений между телами

Блоки Gear и Constraint также накладывают кинематические ограничения между телами. Чем отличаются блоки соединений? В то время как блоки Gear и Constraint параметризованы в терминах чисел степеней свободы, которые они удаляют между телами, блоки соединений параметризованы в терминах обеспечиваемых ими чисел степеней свободы свободы через модули, называемые примитивами соединений.
Каждый блок соединений соединяет только два тела. Такое соединение определяет максимальные степени свободы или числа степеней свободы, которыми могут делиться смежные тела. Эти числа степеней свободы варьируются от нуля в блоке Weld Joint до шести - трех поступательных и трех вращательных - в блоках 6-DOF Joint и Busing Joint. Перемещение относится к изменению положения и повороту к изменению ориентации.
Joint DoFs являются мерой подвижности соединений. Исключая другие ограничения в модели, соединение с большим количеством чисел степеней свободы передвижения между смежными телами. Joint DoFs также имеют математическую интерпретацию. Они являются минимальным количеством переменных состояния, необходимых для полного определения строения соединения на каждом временном шаге во время симуляции.
Рассмотрим прямоугольное соединение. Это соединение позволяет перемещение в плоскости, и поэтому оно имеет два поступательных Числа степеней свободы - по одному для каждой пространственной размерности. На каждом временном шаге строение соединения полностью определяется двумя переменными состояния, координатами положения в плоскости движения [x(t), y(t)]. Это означает, например, что вы можете полностью предписать движение в этом соединении, используя два входных сигналов положения.
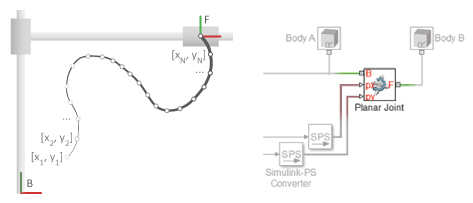
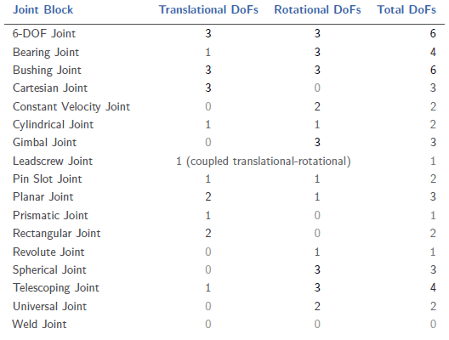
Таблица результирующих Число степеней свободы, которые обеспечивают различные блоки соединений.
Фактическое число степеней свободы в соединении часто меньше, чем позволяет только одно соединение. Это происходит, когда кинематические ограничения в другом месте модели ограничивают относительное движение смежных тел. Такие ограничения могут возникнуть из-за передач в сетке, запрещенных Число степеней свободы из-за других соединений в замкнутых кинематических замкнутых цепях, и фиксированных расстояний и углов между телами, среди других факторов.
Блоки соединений являются ассортиментами примитивов соединений, основных, но полных соединений различных видов вы не можете разлагаться дальше - по крайней мере, без потери поведения, такого как вращательно-поступательная связь свинцового винтового соединения. Примитивы соединений варьируются в диапазоне от нуля в блоке Weld Joint до шести в блоке Busing Joint. Существует пять объединенных примитивов:
Призматический - позволяет перемещение вдоль одной стандартной оси (x, y или z). Блоки соединений могут содержать до трех призматических примитивов соединений, по одному для каждого поступательного Степень свободы. Призматические примитивы маркируются P *, где звездочка обозначает ось движения, например, Px, Py или Pz.
Вращение - позволяет вращать вокруг одной стандартной оси (x, y или z). Блоки соединений могут содержать до трех примитивов вращения соединений, по одному для каждого вращательная степень свободы. Вращательные примитивы маркируются R *, где звездочка обозначает ось движения, например, Rx, Ry или Rz.
Сферический - Позволяет вращение вокруг любой 3D оси, [x, y, z]. Блоки соединений содержат не более одного сферического примитива, и никогда в сочетании с вращательными примитивами. Сферические примитивы маркированы S.
Свинцовый примитив - позволяет связанное вращение и перемещение на стандартной оси (например, z). Этот примитив преобразуется между вращением на одном конце и перемещением на другом. Блоки соединений содержат не более одного свинцового примитива. Свинцовые винты помечены LS *, где звездочка обозначает ось движения.
Соединение с постоянной скоростью - позволяет вращать с постоянной скоростью между пересекающимися, хотя и произвольно совмещенными валами. Блоки соединений содержат не более одного примитива постоянной скорости. Примитивы постоянной скорости маркированы CV.
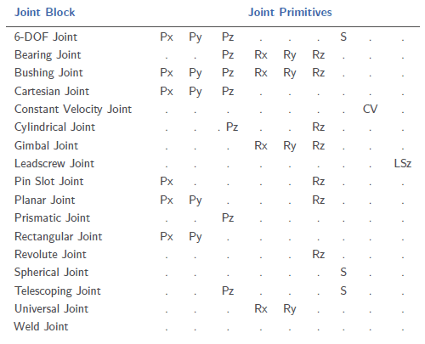
Таблица результирующих примитивов соединений и чисел степеней свободы, которые обеспечивают различные блоки соединений.
Зачем использовать блоки соединений со сферическими примитивами? Те, у кого три вращательных примитивов, восприимчивы к карданной блокировке - естественной, но часто нежелательной потере одной вращательной степени свободы, когда любые две оси вращения выравниваются. Gimbal lock приводит к ошибкам симуляции из-за численных особенностей. Сферические примитивы устраняют риск ошибок gimbal-lock путем представления вращений 3-D с помощью 4-D величин, известных как кватернионы.
Simscape Multibody шарниры идеализированы. Они отличаются от реальных соединений тем, что не имеют инерции - подходящего приближения в большинстве моделей, где влияние инерции соединений на динамику системы часто незначительно. Это имеет место, например, в соединениях с постоянной скоростью автомобильных приводных систем, где инерция вала может карликовать инерцию соединений.
Если инерция соединений важна в вашей модели, можно рассчитать ее с помощью блоков Solid или Inertia. Соедините порты системы координат блоков с соответствующими системами координат соединений и задайте инерционные свойства соединений в диалоговых окнах блока. Можно задать массу или плотность соединений, продукты инерции, моменты инерции и центр масс. Дополнительные сведения о том, как задать инерцию, см. в разделе Представление инерции твердого тела.
