Этот пример показывает, как смоделировать двойной маятник - простую кинематическую цепь, содержащую два движущегося контактирующего тела, соединенных последовательно через два шарнира вращения. Третий корпус представляет собой механическое заземление и жестко соединяется с инерционной лабораторной системой координат. Настраиваемая smdoc_compound_rigid_bodies библиотека предоставляет блоки подсистемы тела, используемые в примере.
Revolute Joint блоки позволяют вам смоделировать соединения, соединяющие соседние тела, и помогают задать их начальные состояния. Simscape™ Multibody™ программное обеспечение удовлетворяет цели совместного состояния именно в том случае, если она кинематически действительна и не конфликтует с другими целями состояния. Параметр Priority позволяет вам задать, какие цели нужно сначала попытаться удовлетворить.
Запустите новую модель.
Перетащите эти блоки в модель. Два блока Revolute Joint обеспечивают двойной маятник две вращательные степени свободы.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Utilities | Solver Configuration | 1 |
| Simscape> Multibody> Utilities | Mechanism Configuration | 1 |
| Simscape> Multibody> Frames and Transforms | World Frame | 1 |
| Simscape> Multibody> Joints | Revolute Joint | 2 |
В MATLAB® в командной строке введите smdoc_compound_rigid_bodies. Откроется библиотека пользовательских блоков с таким же именем.
Перетащите эти пользовательские блоки в модель. Каждый блок представляет тело в двойном маятнике.
| Блок | Количество |
|---|---|
| Поворотное крепление | 1 |
| Двоичная ссылка A | 2 |
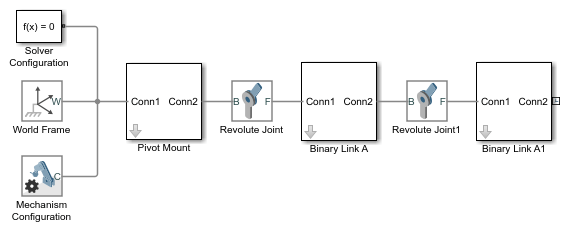
Соедините блоки как показано на рисунке.
В Диалоговые окна блока Revolute Joint выберите State Targets > Specify Position Target. Теперь можно задать требуемые начальные положения двух соединений.
В Value введите эти углы поворота шарнира.
| Имя блока | Значение ( степени) |
|---|---|
| Революционное соединение | 30 |
| Revolute Joint1 | -75 |
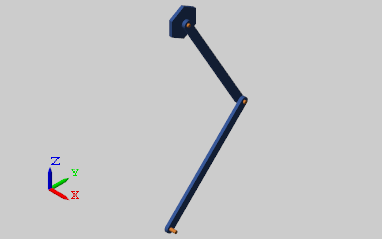
Чтобы визуализировать модель, обновите блок. На вкладке Modeling нажмите Update Model. В Mechanics Explorer откроется 3-D вид сборки двойного маятника. Нажмите кнопку изометрического вида, чтобы получить перспективу на рисунке.
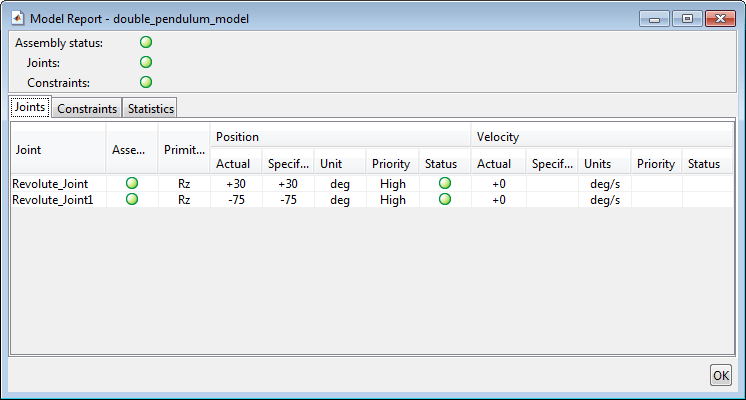
Чтобы проверить состояние сборки шарниров вращения, используйте утилиту Model Report. Можно открыть эту утилиту в панели меню Mechanics Explorer, выбрав Tools > Model Report. На рисунке показана информация о сборке двойного маятника.
Запустите симуляцию. Mechanics Explorer показывает 3-D анимацию сборки двойного маятника. Сборка перемещается из-за силы тяжести, заданной в блоке Mechanism Configuration.
Чтобы увидеть полную модель сборки двойного маятника, в командной строке MATLAB введите:
smdoc_double_pendulum
