Можно использовать блок Transform Sensor, чтобы измерить относительное соотношение между двумя произвольными системами координат, которые соединяются с B и F портами системы координат блока. Отношение включает относительное вращение, перемещение и их первую и вторую производные по времени. Эти измерения являются векторами 3-D или более высоких размерных величин, таких как матрицы вращения.
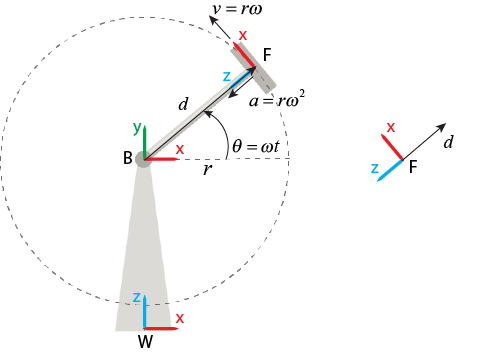
Чтобы выполнить расчет с помощью измеренных векторов, векторы должны быть разрешены в координатах. Установка Measurement Frame параметра определяет, где разрешить измеренные векторы; векторы разрешаются в координатах выбранной системы координат. Например, на рисунке, потому что Measurement Frame было установлено на Worldблок Transform Sensor разрешает вектор преобразования, показанный в виде черной стрелы, в координатах мировой системы координат.

Примечание
Измерение поворота блока Transform Sensor не зависит от параметра Measurement Frame.
Можно задать Measurement Frame параметр равным World, Base, Follower, Non-Rotating Base, и Non-Rotating Follower.
WorldБлок Transform Sensor разрешает измеренные векторы в координатах мировой системы координат.
Мировая система координат является инерционной системой координат.
Base или FollowerБлок Transform Sensor разрешает измеренные векторы в координатах выбранной системы координат, который является основой или последующей системой координат.
Основы или последующая система координат является системой координат, которая соединяется с B или F портом блока, соответственно. Основы и последующие системы координат неинерционны. Поэтому векторы, разрешенные в основе или последующей системе координат, могут включать центростремительные и кориолисовые условия.
Non-Rotating Base или Non-Rotating BaseБлок Transform Sensor преобразует векторы, разрешенные в лабораторной системе координат, в выбранную систему координат, которая является невращающейся основой или не вращающейся последующей системой координат. Другими словами, блок вычисляет матрицу поворота от лабораторной системы координат к текущей основе или последующей системе координат, затем умножает матрицу с векторами, разрешенными в мировой системе координат.
Неповоротная основа или неповоротная последующая система координат является мгновенной системой координат, которая совпадает и выравнивается с соответствующей системой координат основы или последующей системы координат в текущий момент времени. Измерения, разрешенные в невращающихся системах координат, не включают центростремительные и кориолисовые условия.
В таблице сравниваются свойства измерений для различных настроек Measurement Frame.
| Система координат измерения | Стандартная производная связь |
|---|---|
| В мире | Да |
| Основа | Да |
| Последователь | Да |
| НеПоворотная основа | Нет |
| Не Вращающийся Последующий Элемент | Нет |
Когда выбранный кадр удовлетворяет стандартной производной зависимости, измерения, разрешенные в этой системе координат, связаны друг с другом. Для примера, когда вы выбираете World, разрешенный вектор линейного ускорения является производной по времени от разрешенного вектора линейной скорости, который является производной по времени от разрешенного вектора линейного преобразования.
Этот пример показывает измерения блока Transform Sensor с различными настройками Measurement Frame параметра. Изображение иллюстрирует одну систему степени свободы с четырьмя частями: поддержкой, ступицей, штоком и автомобилем. Поддержка закреплена на земле, а шток соединяет ступицу и автомобиль. Основы, последующая и мировая системы координат расположены в центре ступицы, автомобиля и поддержки дна, соответственно.
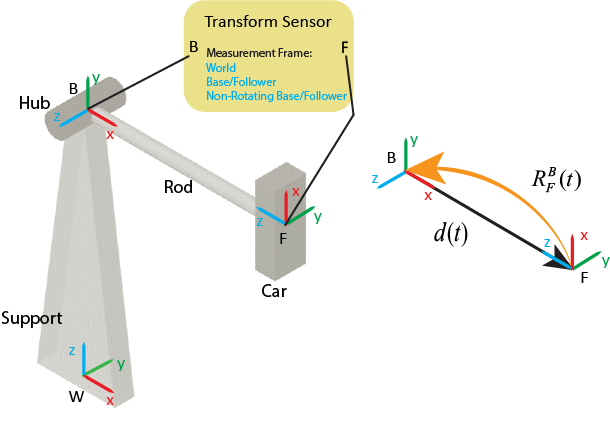
Стержень имеет длину и вращается с постоянной скоростью вращения, , вокруг Z-ось базовой системы координат. Блок Transform Sensor используется для измерения относительных движений между автомобилем и ступицей. Для примера блок измеряет относительный перемещение, и вращение, между машиной и ступицей.
На изображении показан вид спереди системы. В целях простоты этот пример показывает только, как разрешить линейные измерения, такие как перемещение, скорость и ускорение, в Декартовых координатах.
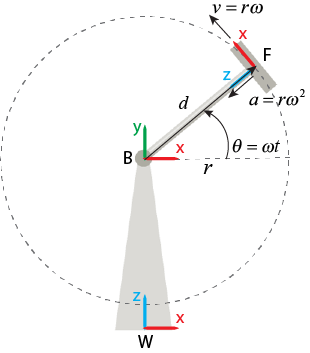
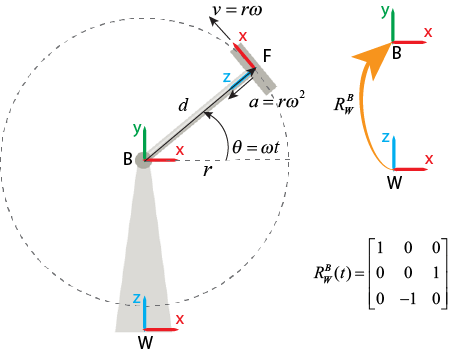
WorldКогда вы задаете Measurement Frame Worldблок измеряет движение последующей системы координат относительно базовой системы координат, затем устраняет относительное движение в лабораторной системе координат.
Векторы смещения, скорости и ускорения имеют постоянные величины, потому что длина стержня постоянна. Однако они вращаются с постоянной скоростью вращения, , вокруг Y-ось лабораторной системы координат. Поэтому векторы преобразования, скорости и ускорения могут быть выражены как:
Обратите внимание, что векторы, разрешенные в мировой системе координат, всегда удовлетворяют стандартной производной зависимости. Для примера, равен производной по времени .
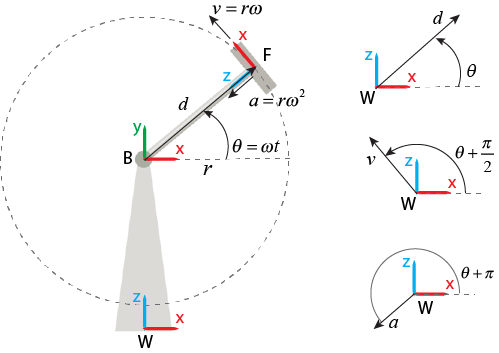
Base или FollowerКогда вы задаете Measurement Frame Baseблок измеряет относительное движение последующей системы координат относительно базовой системы координат и разрешает измерения в координатах базовой системы координат.
Поскольку базовая система координат зафиксирована в этом примере, измерения могут быть выражены как:
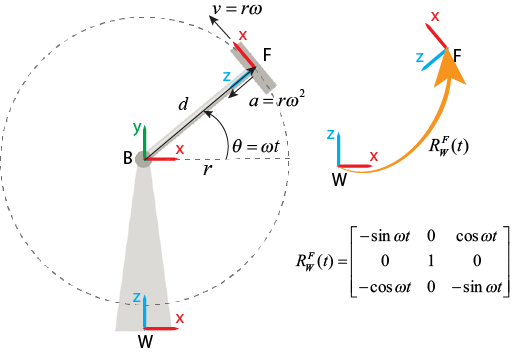
Когда вы задаете Measurement Frame Followerблок измеряет относительное движение последующей системы координат к базовой системе координат, затем разрешает измерения в координатах последующей системы координат. Разрешенные векторы включают центростремительные и кориолисовы условия, потому что последующая система координат вращается с течением времени. К наблюдателю, присоединенному к последующей системе координат, источник базовой системы координат никогда не перемещается. Поэтому линейная скорость и линейное ускорение равны нулю.
Обратите внимание, что векторы, разрешенные в основе, и последующие системы координат всегда удовлетворяют стандартной производной зависимости. Для примера, равен производной по времени .
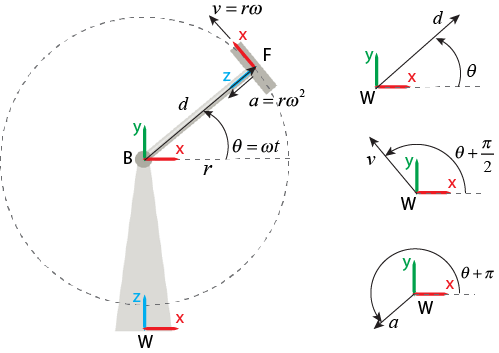
Non-Rotating Base или Non-Rotating FollowerКогда установите Measurement Frame на Non-Rotating Baseблок преобразует векторы, разрешенные в лабораторной системе координат, в мгновенный кадр, который совпадает и выравнивается с базовой системой координат в текущий момент.
Когда вы задаете Measurement Frame Non-Rotating Followerблок преобразует векторы, разрешенные в лабораторной системе координат, в мгновенный кадр, который совпадает и выравнивается с последующей системой координат в текущий момент.
Обратите внимание, что, если основа или последующая система координат не фиксирована, измерения в ее соответствующей неповорачивающейся системе координат не удовлетворяют стандартной производной зависимости. Для примера, потому что последующая система координат вращается, если вы задаете Measurement Frame Non-Rotating Follower, разрешенный вектор скорости не является производной по времени от разрешенного вектора преобразования.
