Simscape™ Multibody™ обеспечивает различные типы измерения силы и крутящего момента. Используя блоки соединений, можно ощущать силы приводов и крутящие моменты, приводящие в действие отдельные примитивы соединений. Можно также определить суммарные и ограничительные силы, действующие на целое соединение.
В этом руководстве вы используете блок Weld Joint, чтобы чувствовать изменяющиеся во времени внутренние силы, которые удерживают тело вместе. Модель двойного маятника, smdoc_double_pendulum, задает начальную точку для руководства. Для получения информации о том, как создать эту модель, смотрите Модель Разомкнутого контура Кинематическая Цепь.
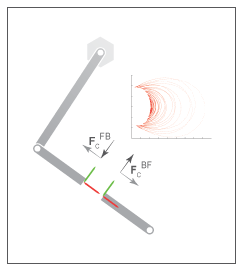
Соединяя блок Weld Joint между твердыми элементами в двухкомпонентной подсистеме ссылки, можно почувствовать ограничения, действующие между ними. Следующий рисунок показывает силы ограничений, которые вы чувствуете в этом руководстве. Продольная сила ограничения выравнивается по оси X рамок сварных систем координат. Поперечная сила ограничения выравнивается по оси Y. Ограничительная сила вдоль оси Z незначительна и поэтому проигнорирована.
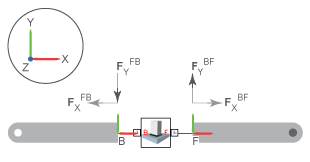
Блок Сварное Соединение позволяет вам чувствовать ограничительную силу, которую последующая система координат оказывает на базовую систему координат, или, кроме того, ограничительную силу, которую базовая система координат оказывает на последующую систему координат. Две силы имеют одинаковую величину, но, как показано на схеме двоичной ссылки, противоположные направления. В этом руководстве вы чувствуете ограничительную силу, которую последующая система координат оказывает на базовую систему координат.
Можно также выбрать систему координат, в которой будет разрешено измерение ограничительной силы. Система координат разрешения может быть либо базовой системой координат, либо последующей системой координат. Некоторые блоки соединений позволяют их системами координат портов иметь различные ориентации, из-за чего одно и то же измерение отличается в зависимости от вашего выбора системы координат разрешения. Однако, поскольку блок Weld Joint обеспечивает нулевые степени свободы, обе системы координат разрешения дают одинаковые компоненты вектора силы ограничения.
В MATLAB® в командной строке введите smdoc_double_pendulum. Откроется модель double-mendulum.
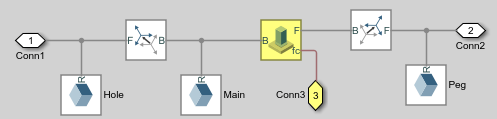
Щелкните Look Inside Mask стрелы в блоке Binary Ссылки A1 subsystem.
От Simscape> Multibody> Joints библиотека, тяните Weld Joint блок.
Соедините блок «Сварное соединение» как показано на рисунке. Этот блок позволяет вам чувствовать ограничительные силы, которые удерживают тело вместе во время движения. Поскольку он обеспечивает нулевые степени свободы между его системами координат портов, он не влияет на динамику модели.
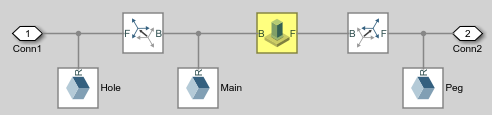
В диалоговом окне «Сварочное соединение» выберите Constraint Force. Блок предоставляет выходной порт физического сигнала, маркированный fc.
Добавьте порт Выхода Simscape к подсистеме блока схеме. Соедините блок как показано на рисунке и выйдите из представления подсистемы.
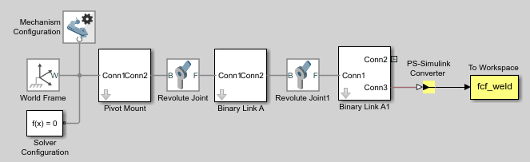
Перетащите следующие блоки в главное окно модели. Эти блоки позволяют вам выводить сигнал ограничительной силы в рабочее пространство MATLAB.
| Библиотека | Блок |
|---|---|
| Simscape> Utilities | PS-Simulink Converter |
| Simulink> Sinks | To Workspace |
Соедините блоки как показано на рисунке. Проверьте, что блок PS-Simulink Converter соединяется с недавно добавленным портом Simscape.
Задайте эти параметры блоков.
| Блок | Параметр диалогового окна | Значение |
|---|---|---|
| PS-Simulink Converter | Output signal unit | mN |
| К рабочей области | Variable name | fcf_weld |
Модули измерения mN подходят для этой модели, которая содержит алюминиевые ссылки приблизительно 30 см × 2 см × 0,8 см.
В каждом Диалоговом окне блока Revolute Joint выберите Internal Mechanics > Damping Coefficient и введите 1e-5. Коэффициент демпфирования позволяет вам смоделировать рассеивание энергии во время движения, так что модель двойного маятника в конечном счете приходит в покой.
На вкладке Modeling нажмите Model Settings.
На вкладке Solver окна Параметры Конфигурации установите параметр Solver равным ode15s. Это рекомендуемый решатель для физических моделей.
На той же вкладке установите параметр Max step size равным 0.001 с.
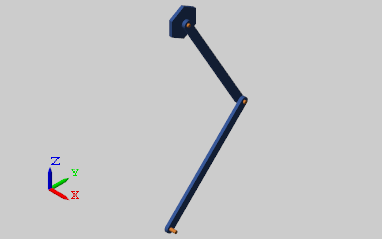
Запустите симуляцию. В Mechanics Explorer откроется динамический вид модели. В панели меню Mechanics Explorer нажмите кнопку «Изометрический вид», чтобы просмотреть двойной маятник с изометрической точки зрения.
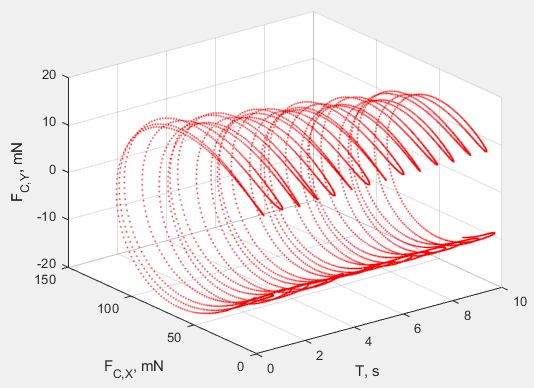
В командной строке MATLAB введите следующие команды plot:
figure;
plot3(fcf_weld.time, fcf_weld.data(:,1), fcf_weld.data(:,2),...
'.', 'MarkerSize', 1, 'Color', 'r');
grid on;
xlabel('T, s');
ylabel('F_{C,X}, mN');
zlabel('F_{C,Y}, mN');