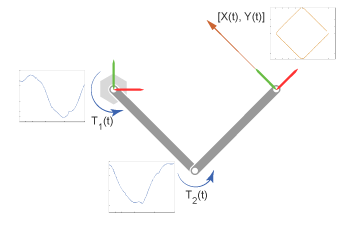
Sensing позволяет вам выполнять аналитические задачи на модели. Для примера можно выполнить обратный кинематический анализ модели робота-манипулятора. Путем назначения конечной эффекторной траектории и измерения сил приводов соединений и крутящих моментов, можно получить изменяющийся во времени профиль каждого входного параметра.
Переменные, которые вы предписываете, входы модели и те, которые вы чувствуете, выходы модели, определяют, какие типы анализа вы можете выполнить. Путем изменения входных входов и выходов модели можно выполнить многочисленные другие типы анализа. Для примера, чтобы выполнить прямой кинематический анализ на модели робота-манипулятора, можно назначить траектории соединений манипулятора и почувствовать полученную траекторию энд-эффектора.
Чтобы поддержать различные аналитические задачи, Simscape™ Multibody™ ПО предоставляет широкую область значений переменных, которые можно понять. Каждая переменная принадлежит к любой из двух категорий:
Переменные движения - Линейное и угловое положение, скорость и ускорение. Линейные переменные доступны в различных системах координат, включая Декартовы, сферические и цилиндрические. Угловые переменные доступны в различных форматах, включая кватернион, угол оси и матрицу преобразования.
Переменные силы и крутящего момента - Срабатывание, ограничение и общие силы и крутящие моменты, действующие на соединение, а также определенные силы и крутящие моменты, действующие вне соединения.
Вся чувствительность охватывает несколько блоков Simscape Multibody. Два типа блоков обеспечивают измерение движения:
Блоки соединений - измерение движения между основой и последующей системами координат блока соединений. Переменные, которые можно почувствовать, организованы примитивом соединения (призматические, вращательные или сферические).
Блок Transform Sensor - измерение движения между любыми двумя системами координат в модели. Этот блок обеспечивает наиболее полную возможность измерения движения в Simscape Multibody.
Три типа блоков обеспечивают измерение силы и крутящего момента:
Блоки соединений - Срабатывание, ограничение и общее измерение силы и крутящего момента между основой и последующими системами координат порта. Силы приводов и измерение крутящего момента выполнены примитивом соединения.
Ограничительные блоки - Сила ограничения и крутящий момент между основой и последующими системами координат порта.
Некоторые блоки Forces и Torques - общая сила, которую блок оказывает между основой и последующими системами координат порта. Только определенные блоки Forces и Torques обеспечивают этот тип измерения, такой как Spring and Damper Force и Inverse Square Law Force.
Каждый выход измерения находится в формате физического сигнала. Можно преобразовать физические сигналы в Simulink® сигналы, использующие блоки Simscape конвертера, например, в целях графического изображения, используя блок Scope. Для получения информации о том, как использовать физические сигналы в моделях Simscape Multibody, смотрите Приведение в действие и Измерение с физическими сигналами.
Inverse Square Law Force | Scope | Spring and Damper Force | Transform Sensor
