Датчик, который измеряет относительное пространственное соотношение между двумя системами координат
Simscape/Multibody/Системы координат и преобразования

Блок Transform Sensor измеряет относительное пространственное соотношение между двумя произвольными системами координат в модели Simscape™ Multibody™. Измерения разрешаются в системе координат блока и включают относительные смещения, вращения и их первую и вторую производные по времени.
Блок имеет два порта системы координат: B и F. Чтобы измерить относительное соотношение между двумя системами координат, сначала соедините порты системы координат с системами координат, которые вы хотите измерить; затем установите параметр Measurement Frame в требуемую систему координат, чтобы разрешить измерения; последний выбор требуемых выходных параметров для выражения измерений.
Совет
Чтобы измерить абсолютные поступательные или вращательные величины системы координат, соедините порты F и B системы координат блока с этой системой координат и мировой системой координат модели, соответственно.
Установка параметра Measurement Frame влияет на все выходы блока, кроме таковых, перечисленных в таблице.
| Выходы | Порты |
|---|---|
| Измерения поворота | q, axs, Q и R |
| Производные Кватерниона | Q и Qdd |
| Производные Rotation-матрицы | Rd и Rdd |
| Расстояние и его производные | dst, vdst и adst |
Блок Transform Sensor имеет пять различных вариантов выбора параметра Measurement Frame: World, Base, Follower, Non-Rotating Base, и Non-Rotating Follower. Когда вы задаете Measurement Frame Worldвсе измерения разрешены в мировой системе координат. Когда вы задаете Measurement Frame Base или Follower, разрешенные измерения ускорения включают центростремительные и кориолисовы условия, если соответствующая основа или последующая система координат вращается. Когда вы устанавливаете Measurement Frame параметр равным Non-Rotating Base или Non-Rotating Followerизмерения не удовлетворяют стандартной производной зависимости, если вращается соответствующая основа или последующая система координат. Для примера относительная линейная скорость не равна производной по времени от относительного перевода. Для получения дополнительной информации смотрите Выбор Системы координат измерения.
Блок имеет три параметризации, чтобы выразить измеренные повороты: ось угла, кватернион и матрица поворота. Выберите Angle и Axis параметры, чтобы использовать параметризацию оси угла. Выберите Quaternion или Transform параметры под Rotation, чтобы использовать параметризации кватерниона или матрицы вращения. Точно так же блок имеет три параметра для выражения скоростей вращения и ускорений: X-, Y- и Z- координаты; производные кватерниона по времени; и матрицу. Чтобы включить эти параметризации, можно выбрать соответствующие параметры под Angular Velocity и Angular Acceleration. Смотрите Вращательные Измерения для получения дополнительной информации.
Блок имеет три системы координат для выражения поступательных измерений: Декартовых, цилиндрических и сферических. Можно выбрать один или несколько из них одновременно. Смотрите Translational Measurements для получения дополнительной информации.
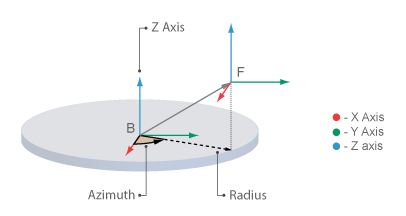
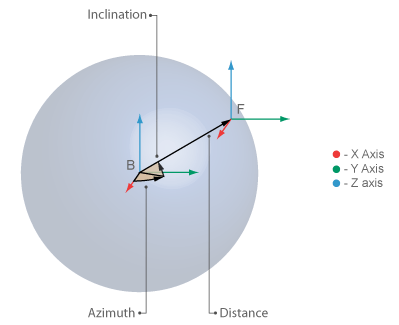
В таблицах суммированы координаты цилиндрической и сферической систем, а на изображениях показаны схемы систем. Для простоты в изображениях параметр Measurement Frame установлен в Base для разрешения измерений.
Цилиндрические координаты
| Координата | Описание |
|---|---|
| Radius | Длина проекции вектора BF, в X-Y плоскости измерения системы координат. |
| Azimuth | Угол Radius относительно положительной оси X, в плоскости X-Y. Угол разрешается в системе координат измерения и падает в области значений [- |
| Z | Стандартный Декартов Z -координат вектора BF разрешено в системе координат измерения. |
Сферические координаты
| Координата | Описание |
|---|---|
| Distance | Расстояние между источниками основы и последующей системы координат. |
| Azimuth | Угол проекции вектора BF в плоскости X-Y относительно положительной оси X -. Угол разрешается в системе координат измерения и падает в области значений [- |
| Inclination | Угол вектора BF относительно X-Y плоскости измерения координат. Угол падает в область значений [- |
Чтобы использовать определенную систему координат, выберите соответствующие параметры. Например, если вы хотите использовать Декартову систему, чтобы выразить измеренную относительную линейную скорость последующей системы координат, выберите X, Y и Z параметры под Velocity. Обратите внимание, что и установка параметров Measurement Frame, и выбор систем координат влияют на поступательные измерения.
Порты выхода остаются скрытыми, пока вы не выберете их соответствующие параметры. Каждый порт выводит изменяющийся во времени физический сигнал. Можно использовать блок PS-Simulink Converter, чтобы задать модули выходов, когда вы соединяете блок Transform Sensor с Simulink® блоки.

