Реализуйте машину постоянного тока с обмоткой возбуждения или с постоянными магнитами
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
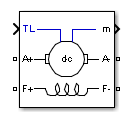
Блок DC Machine реализует машину постоянного тока с обмоткой возбуждения или с постоянными магнитами.
Для машины постоянного тока с обмоткой возбуждения обеспечивается доступ к полевым клеммам (F +, F−), так что модель машины может использоваться как шунтируемая или последовательно соединенная машина постоянного тока. Крутящий момент, приложенный к валу, обеспечивается в Simulink® вход TL.
Схема якоря (A +, A−) состоит из индуктора La и резистора Ra последовательно с противоэлектродвижущей силой (CEMF) E.
CEMF пропорциональен скорости машины.
E = KEω
KE - постоянное напряжение, а ω - скорость машины.
В модели машины постоянного тока с отдельным возбуждением постоянная напряжения KE пропорциональна If тока возбуждения:
KE = L af If,
L af является векторной взаимной индуктивностью .
Электромеханический крутящий момент, развиваемый машиной постоянного тока, пропорционален Ia тока якоря.
Te = KTIa,
KT - крутящий момент, константа. Конвенция о знаках для Te и TL:
Te , TL > 0: Моторный режим
Te, TL < 0: режим генератора
Крутящий момент равен постоянному напряжению.
KT = KE.
Схема якоря соединяется между портами A + и A− блока DC Machine. Оно представлено последовательной ветвью Ra La с Управляемым Источником Напряжения и блоком Измерения Тока.
В модели машины постоянного тока с обмоткой возбуждения цепь возбуждения представлена схемой RL. Он соединяется между F + и F− портами блока DC Machine.
В модели машины постоянного тока с постоянными магнитами ток возбуждения отсутствует, поскольку поток возбуждения устанавливается магнитами. KE и KT являются постоянными.
Механическая часть вычисляет скорость машины постоянного тока из крутящего крутящего момента привода, приложенного к ротору. Скорость используется для реализации напряжения E CEMF схемы якоря.
Механическая часть реализует это уравнение:
J = инерция, Bm = коэффициент вязкого трения и Tf = крутящий момент трения Кулона.
Обеспечивает набор предопределенных электрических и механических параметров для различных номиналов машины постоянного тока степени (HP), постоянного напряжения (V), номинальной скорости (об/мин) и напряжения возбуждения (V).
Предустановленные модели доступны только для модели машины постоянного тока с обмоткой возбуждения.
Выберите одну из предустановленных моделей, чтобы загрузить соответствующие электрические и механические параметры в записи диалогового окна. Выберите No (по умолчанию), если вы не хотите использовать предустановленную модель, или если вы хотите изменить некоторые параметры предустановленной модели.
При выборе предустановленной модели электрические и механические параметры на вкладке Parameters диалогового окна становятся немодифицируемыми (недоступными). Чтобы начать с заданной предустановленной модели и затем изменить параметры машины:
Выберите предустановленную модель, которую вы хотите инициализировать параметры.
Измените значение параметров Preset model на No. Это не меняет параметры машины. При этом вы разрываете связь с конкретной предустановленной моделью.
Измените параметры машины так, как вы хотите, затем нажмите Apply.
Выберите крутящий момент, приложенный к валу, или скорость ротора в качестве входов Simulink блока, или представьте вал машины с помощью Simscape™ вращающегося механического порта.
Выберите Torque TL (по умолчанию), чтобы задать вход крутящего момента в N.m и изменить маркировку входного сигнала блока на TL. Скорость машины определяется Инерцией J машины и различием между приложенным крутящим моментом механической нагрузки TL и внутренним электромагнитным крутящим моментом Te. Условие знака для механического крутящего момента: когда скорость положительная, сигнал положительного крутящего момента указывает на режим двигателя и отрицательный сигнал указывает на режим генератора.
Выберите Speed w чтобы задать вход скорости в рад/с и изменить маркировку входа блока на w. Скорость машины налагается, и механическая часть модели (Inertia J) игнорируется. Использование скорости в качестве механического входа позволяет моделировать механическую связь между двумя машинами.
Следующий рисунок показывает, как смоделировать жесткое соединение вала в генераторе мотора. Выход скорости машины 1 (двигатель) соединяется со входом скорости машины 2 (генератор), тогда как выход Te электромагнитного крутящего момента машины 2 прикладывается к входу TL механического крутящего момента нагрузки машины 1. Коэффициент Kw учитывает модули скорости обеих машин (рад/с) и отношение коробки передач. Коэффициент KT учитывает крутящие модули обеих машин (N.m) и номинальные значения машины. Кроме того, поскольку J2 инерции проигнорирована в машине 2, J2, относящаяся к скорости машины 1, должна быть добавлена к J1 инерции машины 1.
Выберите Mechanical rotational port добавить в блок механический вращательный порт Simscape, который позволяет соединять вал машины с другими блоками Simscape, имеющими механические вращательные порты. Вход Simulink, представляющий механический крутящий момент TL или скорость w машины, затем удаляется из блока.
Следующий рисунок показывает, как соединить Идеальный Исходный блок Крутящего момента из библиотеки Simscape с валом машины, чтобы представлять машину в режиме двигателя или в режиме генератора, когда скорость ротора положительная.
Выберите между обмоткой возбуждения и установкой постоянного тока с постоянными магнитами. Варианты Wound (по умолчанию) и Permanent magnet.
Когда этот флажок установлен, выходы измерения используют имена сигналов для идентификации меток шины. Выберите эту опцию для приложений, которые требуют, чтобы метка сигнала шины имела только алфавитно-цифровые символы.
Когда этот флажок снят (по умолчанию), выход измерения использует определение сигнала для идентификации меток шины. Метки содержат неалфавитно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink.
Сопротивление якоря Ra, в омах, и индуктивность якоря La, в генри. По умолчанию это [ 0.6 0.012].
Сопротивление возбуждения Rf, в омах, и индуктивность возбуждения Lf, в генри. Этот параметр видим, только когда параметр Field type на вкладке Configuration установлен в Wound. По умолчанию это [ 240 120].
Обмотка якоря возбуждения, взаимная индуктивность, в генри. Этот параметр видим, только когда параметр Field type на вкладке Configuration установлен в Wound. По умолчанию это 1.8.
Для машины постоянного тока с постоянными магнитами выберите постоянную машину, которую вы хотите задать для параметризации блоков. Значения следующие Torque constant (по умолчанию) и Back-emf constant. Этот параметр видим, только когда параметр Field type на вкладке Configuration установлен в Permanent magnet.
Крутящий момент на постоянную тока машины постоянного тока с постоянными магнитами в N.m/A. Этот параметр видим только, когда параметр Field type на вкладке Configuration установлен в Permanent magnet и параметр Specify выше установлен в Torque constant. По умолчанию это 1.8.
Напряжение на константу скорости машины постоянного тока с постоянными магнитами в В/об/мин. Этот параметр видим только, когда параметр Field type на вкладке Configuration установлен в Permanent magnet и параметр Specify выше установлен в Back-emf constant. По умолчанию это 1.8.
Общая инерция машины постоянного тока, в кг.м2. По умолчанию это 1.
Коэффициент общего трения машины постоянного тока в Н.М.с. По умолчанию это 0.
Суммарный крутящий момент трения Кулона машины постоянного тока в N.M. Default равен 0.
Задает начальную скорость для машины постоянного тока, в рад/с, порядком начать симуляцию с определенной начальной скоростью. Чтобы начать симуляцию в установившемся состоянии, начальное значение входного сигнала крутящего момента TL должно быть пропорционально начальной скорости. По умолчанию это 1.
Задает шаг расчета, которую использует блок. Чтобы наследовать шаг расчета, заданное в блоке Powergui, установите этот параметр равным −1 (по умолчанию).
TLВходной вход блока является крутящим моментом механической нагрузки в Н.м.
wАльтернативный вход блока (в зависимости от значения параметра Mechanical input) является скоростью машины, в рад/с.
mВыход блока является вектором, содержащим сигналы измерения. Можно демультиплексировать эти сигналы с помощью блока Bus Selector, предоставленного в библиотеке Simulink.
Имя | Определение | Модули |
|---|---|---|
w | Скорость wm | рад/с |
iA | Ток якоря ia | A |
если | Ток поля, если | A |
Те | Электрический крутящий момент Te | N.m |
The power_dcmotor пример иллюстрирует запуск машины постоянного 240-V 5 л.с. с трехэтапным пускателем сопротивления.
[1] Анализ электрической техники, Krause et al., pp. 89-92.
Asynchronous Machine, Synchronous Machine SI Fundamental, Synchronous Machine pu Fundamental, Synchronous Machine pu Standard
