Несмотря на то, что библиотека Electric Drives содержит модели приводов с двигателем, широко используемые в промышленности, у вас могут быть некоторые конкретные требования, приводящие вас к созданию собственной модели привода с двигателем. Следующая информация описывает, как создать модель привода с помощью Simulink® и Simscape™ Electrical™ блоки Специализированных Степеней. Вы создадите привод двигателя с управлением, очень похожий на модель AC3. Следующий рисунок показывает блок диска.
Векторный привод асинхронного двигателя переменной частоты
Асинхронный двигатель питается управляемым током инвертором ШИМ, который действует как трехфазный синусоидальный источник тока. Скорость .rмотора сравнивается с уставкой, и ошибка обрабатывается контроллером скорости, чтобы получить команду Te * крутящего момента.
Как показано ниже, поток ротора и крутящий момент могут отдельно управляться токами ids прямой оси статора и iq квадратурной оси, соответственно.
Принцип векторного управления
Математические принципы этого привода переменного тока были обсуждены в библиотеке электроприводов. Здесь мы перепишем только основные уравнения. Уставка тока iqs * квадратурной оси статора вычисляется из ссылки крутящего момента Te * as
где Lr - индуктивность ротора, Lm - взаимная индуктивность, и |ψr'est - предполагаемое редактирование ротора, заданное как
where .r. = Lr/Rr является временной константой ротора.
Уставка тока прямой оси статора ids * получена из исходного входного |ψr| потока ротора *.
Положение потока ротора, необходимое для преобразования координат, генерируется из скорости и частоты скольжения ротора
Частота скольжения вычисляется из опорного тока статора iqs * и параметров двигателя.
Ссылки тока iqs * и ids * преобразуются в ссылки тока фазы ia *, ib *, ic * для токовых регуляторов. Регуляторы обрабатывают измеренный и уставочный токи, чтобы получить сигналы стробирования инвертора.
Роль контроллера скорости состоит в том, чтобы сохранить скорость двигателя равной исходному входу скорости в установившемся состоянии и обеспечить хорошую динамику во время переходных процессов. Контроллер может быть пропорционально-интегральным типом.
Откройте power_acdrive моделировать и сохранить как case3 в рабочей директории так, чтобы можно было вносить дальнейшие изменения без изменения исходного файла.
Следующий рисунок показывает power_acdrive модель, в которой блоки из Simscape Electrical Specialized Power Systems и библиотек Simulink используются для моделирования привода асинхронного двигателя.
Векторное управление приводом с электродвигателем переменного тока (power_acdrive)
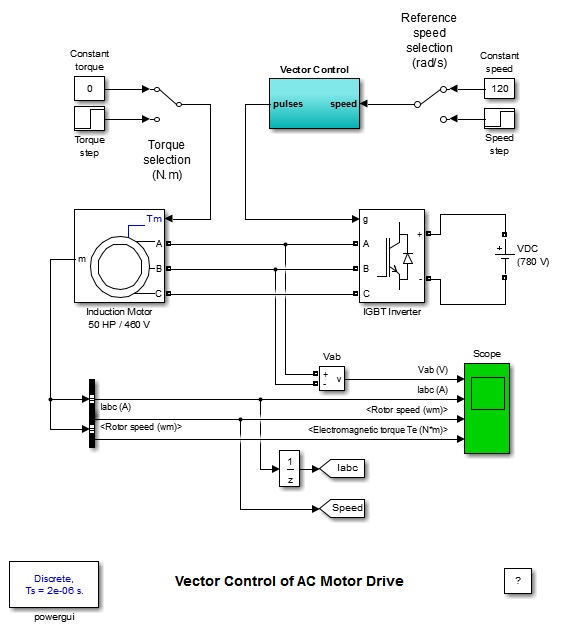
Асинхронный двигатель моделируется блоком Asynchronous Machine. В данном примере используется двигатель мощностью 50 л.с., 460 В, четырехполюсный двигатель мощностью 60 Гц со следующими параметрами:
RS |
|
Lls |
|
Lm |
|
RR |
|
Llr |
|
Задающая скорость и крутящий момент нагрузки, приложенные к валу мотора, могут быть выбраны блоком Manual Switch в порядок, чтобы использовать либо постоянное значение, либо шаговую функцию. Первоначально задающая скорость устанавливается на постоянное значение 120 рад/с, и крутящий момент нагрузки также поддерживается постоянным на уровне 0 Н.м
Векторное управление моделируется блоком Vector Control, как показано на Vector Control of AC Motor Drive (power_acdrive). Этот блок состоит из блоков Simulink, показанных на следующем рисунке.
Векторный блок управления
Инвертор IGBT моделируется блоком Universal Bridge, в котором опции Power Electronic device и Port configuration выбраны как IGBT/Diode и ABC как выходные терминалы соответственно. Входное напряжение ссылки постоянного тока представлено источником напряжения постоянного тока 780 В.
Регулятор тока состоит из трех контроллеров гистерезиса и построен с блоками Simulink. Токи мотора обеспечиваются выходом измерения блока Asynchronous Machine.
Преобразования между abc и системами координат dq выполняются блоками abc_to_dq0 Transformation и dq0_to_abc Transformation
abc_dq
dq_abc
Поток ротора вычисляется блоком Flux_Calculation.
Положение потока ротора (И) вычисляется Teta Calculation в блоке Vector Control. Скорость двигателя обеспечивается выходом измерения блока Asynchronous Machine.
Привязка тока по квадратурной оси статора (iqs *) вычисляется блоком iqs*_Calculation.
Привязка тока прямой оси статора (ids *) вычисляется блоком id*_Calculation.
Контроллер скорости имеет пропорционально-интегральный тип и реализован с использованием блоков Simulink.
В порядок увеличения скорости симуляции эта модель дискретизируется с использованием шага расчета 2 мкс. Переменная Ts = 2e-6 автоматически загружается в рабочую область, когда вы открываете эту модель. Этот период расчета Ts используется как для степени (Ts указаны в Powergui) и системе управления.
Запустите симуляцию.
Напряжения и формы тока двигателя, а также скорость и крутящий момент двигателя отображаются на четырех осях возможностей, соединенной с переменными Vab, Iabc,
Вы можете запустить диск, указав [1,0,0,0,0,0,0,0] как начальные условия для блока Asynchronous Machine (начальный скольжение = 1 и отсутствие токов, протекающих в трех фазах). Ссылка на скорость 120 рад/с.
Скорость двигателя, электромеханический крутящий момент и токи, наблюдаемые во время запуска привода асинхронного двигателя, показаны в Starting the Induction Motor Drive.
Обратите внимание, что можно сохранить конечный вектор состояния системы и использовать его как начальное состояние в последующей симуляции, чтобы моделирование могло начаться в установленных условиях.
Запуск привода асинхронного двигателя
Когда установившееся состояние достигнуто, можно остановить симуляцию и масштабирование сигналов возможностей.
Этот рисунок показывает напряжение двигателя, ток и форму крутящего момента, полученные, когда двигатель вращается без нагрузки (крутящий момент = 0 Н.м) со скоростью 120 рад/с.
Полоса 20 А, накладываемая регулятором тока гистерезиса, четко видна на трех токах мотора.
Установившиеся формы тока, напряжения и крутящего момента мотора
Можно изучить динамическую эффективность привода (регулирование скорости эффективности от ссылки и изменение крутящего момента нагрузки), применив к приводу два изменяющихся условий работы: шаг изменения скорости ссылки и шаг изменения крутящего момента нагрузки.
Используйте переключатель выбора Задающей скорости и переключатель выбора крутящего момента, чтобы задать опорные шаги скорости от 120 рад/с до 160 рад/с при t = 0,2 с и крутящий момент нагрузки от 0 Н.м до 200 Н.м при t = 1,8 с. Вектор конечного состояния, полученный с предыдущей симуляцией, может использоваться в качестве начального условия, так что симуляция начинается с устойчивого состояния. Загрузите power_acdrive_init.mat файл, который создает xInitial переменная. На вкладке Simulation нажмите Model Settings. Выберите Data Import/Export. Выберите Initial state и нажмите OK. Перезапустите симуляцию.
Здесь показана реакция привода асинхронного двигателя на последовательные изменения ссылки скорости и крутящего момента нагрузки.
Динамическая эффективность привода асинхронного двигателя
[1] Leonhard, W., Control of Electrical Drives, Springer-Verlag, Berlin, 1996.
[2] Murphy, J. M. D., and Turnbull, F. G., Power Electronic Control of AC Motors, Pergamon Press, Oxford, 1985.
[3] Bose, B. K., Power Electronics and AC Drives, Prentice Hall, Englewood Cliffs, N.J., 1986.
