Составная модель электродвигателя с электрическими и крутящими характеристиками и моделированием отказа
Simscape/Электрический/Электромеханический/Коллекторные двигатели
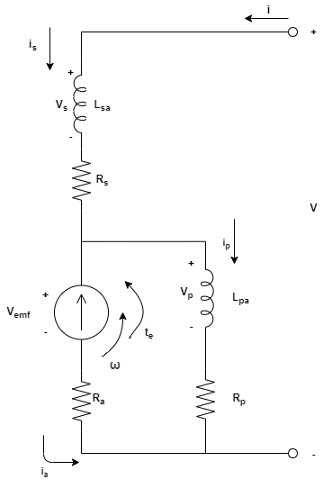
Блок Compound Motor представляет электрические и крутящие характеристики составного мотора. Этот рисунок показывает эквивалентную схему для составного двигателя с коротким шунтом:
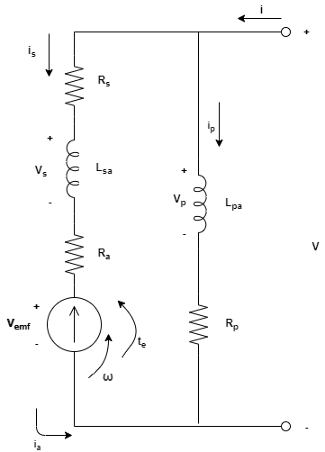
Этот рисунок показывает эквивалентную схему для составного двигателя с длинным шунтом:
где:
i - общий ток.
is - последовательный обмотка возбуждения.
ip - ток параллельной обмотки возбуждения.
ia - ток якоря.
V - общее напряжение.
Vs - последовательное напряжение обмотки возбуждения.
Vp - параллельное напряжение обмотки возбуждения.
Va - напряжение якоря.
ω - скорость вращения.
te - крутящий момент.
Если вы устанавливаете параметр Steady-state parameterization равным By equivalent circuit parametersможно задать эквивалентные параметры схемы для этой модели:
Ра - Armature resistance, Ra
Rs - Series field winding resistance, Rs
Rp - Shunt field winding resistance, Rp
Lsa - Series field winding to armature back EMF constant, Lsa
Lpa - Shunt field winding to armature back EMF constant, Lpa
Когда Electrical circuit topology установлено на Short-shunt, электрические динамические уравнения:
Это механические динамические уравнения для составного двигателя с коротким шунтом:
Из этих динамических уравнений блок получает статические уравнения, делая производные равными нулю:
Затем он вычисляет установившиеся токи и крутящий момент следующим образом:
Когда Electrical circuit topology установлено на Long-shunt, электрические динамические уравнения:
Это механические динамические уравнения для составного двигателя с длинным шунтом:
Из этих динамических уравнений блок получает статические уравнения, делая производные равными нулю:
Затем он вычисляет установившиеся токи и крутящий момент следующим образом:
Блок Compound Motor позволяет вам смоделировать три типа отказов:
Отказ обмотки якоря - Обмотка якоря отказывает и становится разомкнутой.
Последовательный отказ обмотки возбуждения - последовательный отказ обмотки возбуждения и становится разомкнутой схемой.
Отказ обмотки возбуждения шунта - обмотка обмотки возбуждения шунта прекращает работать и становится разомкнутой.
Блок может вызвать события отказа:
В определенное время (временный отказ)
Когда предел тока превышен на больше, чем определенный временной интервал (поведенческий сбой)
Можно включать или отключать эти триггерные механизмы отдельно.
Можно выбрать, выдавать ли значения при возникновении отказа, используя параметр Reporting when a fault occurs. Утверждение может принимать форму предупреждения или ошибки. По умолчанию блок не выдает значения.
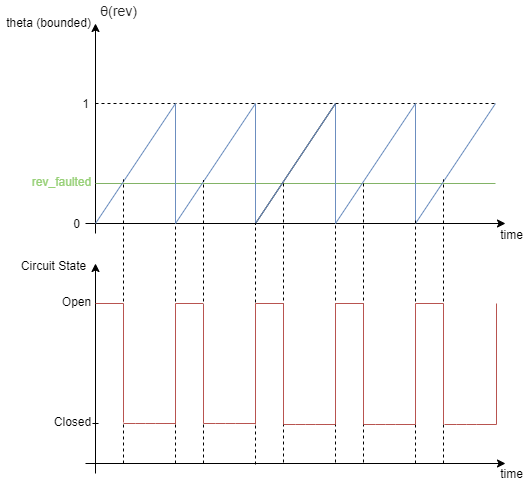
Если вы устанавливаете параметр Enable armature winding open-circuit fault равным Yesякорь прекращает работать в момент времени, заданный параметром Time at which armature winding fault is triggered для временного отказа, или когда токи обмотки превышают значение параметра Maximum permissible armature winding current для поведенческого отказа. Когда якорь отказывает, источник напряжения, соединенный с этим блоком, наблюдает разомкнутую схему для части общего оборота двигателя, заданного параметром Fraction of revolution during which armature is open-circuit. Этот рисунок иллюстрирует поведение состояния цепи и состояние разомкнутой цепи (rev_faulted) на период революции:
Блок имеет три необязательных тепловых порта, которые по умолчанию скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок и из контекстного меню выберите Simscape > Block choices > Show thermal port.
Используйте тепловые порты, чтобы симулировать эффекты потерь сопротивления меди, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
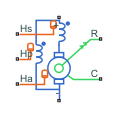
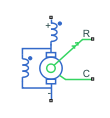
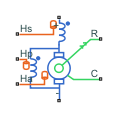
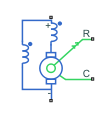
Тип, видимость и расположение портов блока зависят от того, как вы конфигурируете параметр Electrical circuit topology на вкладке Configuration, и если вы выставляете тепловые порты:
| Electrical circuit topology | Thermal ports | Блок |
|---|---|---|
Long-shunt | Hidden |
|
Visible |
| |
Short-shunt | Hidden |
|
Visible |
|