Двигатель постоянного тока с параллельным возбуждением с электрическими и крутящими характеристиками
Simscape/Электрический/Электромеханический/Коллекторные двигатели
Блок Shunt Motor представляет электрические и крутящие характеристики двигателя постоянного тока с параллельным возбуждением, используя следующую модель эквивалентной схемы.
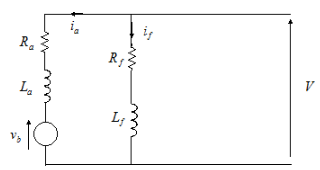
Когда вы устанавливаете параметр Model parameterization равным By equivalent circuit parameters, вы задаете эквивалентные параметры схемы для этой модели:
Ра - Armature resistance
Ла - Armature inductance
Rf - Field winding resistance
Lf - Field winding inductance
Блок Shunt Motor вычисляет крутящий момент двигателя следующим образом:
Магнитное поле в двигателе индуцирует следующий задний ЭДС vb в якоре:
где Laf - константа пропорциональности, и ω - скорость вращения.
Механическая степень равна степени, на которую реагирует коэффициент противо-ЭДС:
Это крутящий момент двигателя:
Характеристика крутящий момент-скорость для модели блока Shunt Motor связана с параметрами на предыдущем рисунке. Когда вы устанавливаете параметр Model parameterization равным By rated power, rated speed & no-load speedблок решает для эквивалентных параметров схемы следующим образом:
Для зависимости крутящий момент и скорость в установившемся режиме L не имеет никакого эффекта.
Суммируйте напряжения вокруг цикла:
Решить предыдущие уравнения для ia и если:
Замените эти значения ia и if в уравнение на крутящий момент:
Блок использует номинальную скорость и степень, чтобы вычислить номинальный крутящий момент. Блок использует номинальный крутящий момент и значения скорости без нагрузки, чтобы получить одно уравнение, которое относится к Ra и Laf/Rf. Он использует скорость без нагрузки при нулевом крутящем моменте, чтобы получить второе уравнение, которое связывает эти две величины. Затем он решает для Ra и Laf/Rf.
Блок моделирует инерцию двигателя J и демпфирование B для всех значений параметра Model parameterization. Крутящий момент выхода:
Блок производит положительный крутящий момент, действующий от механических портов C к R.
Блок имеет два опциональных тепловых порта, по одному на обмотку, скрытых по умолчанию. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, а затем из контекстного меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Temperature Dependence и Thermal Port. Эти параметры описаны далее на этой странице с описанием.
Используйте тепловые порты, чтобы симулировать эффекты потерь сопротивления меди, которые преобразуют электрические степени в тепло. Для получения дополнительной информации об использовании тепловых портов в блоках привода, смотрите Симуляция термальных эффектов во Вращательном и Поступательном приводах.
[1] Bolton, W. Mechatronics: Electronic Control Systems in Mechanical and Electrical Engineering, 3-е издание Pearson Education, 2004.
DC Motor | Induction Machine (Single-Phase) | Motor & Drive (System Level) | Universal Motor

