Модель электродвигателя постоянного тока с электрическими и крутящими характеристиками и моделированием отказа
Simscape/Электрический/Электромеханический/Коллекторные двигатели
Блок DC Motor представляет электрические и крутящие характеристики двигателя постоянного тока с помощью следующей модели эквивалентной схемы:
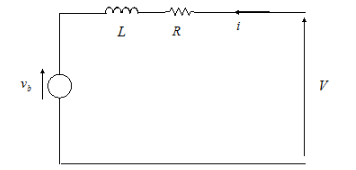
Вы задаете эквивалентные параметры схемы для этой модели, когда задаете параметр Model parameterization равным By equivalent circuit parameters. Резистор R соответствует сопротивлению, заданному вами в параметре Armature resistance. Индуктор L соответствует индуктивности, заданной вами в параметре Armature inductance.
Можно задать, как сгенерировать магнитное поле двигателя постоянного тока, установив параметр Field type на нужную опцию. Постоянные магниты в двигателе вызывают следующие коэффициенты противо-ЭДС, vb в якоре:
где kv - Back-emf constant, а ω - скорость вращения. Двигатель производит следующий крутящий момент, который пропорциональен i тока мотора:
где kt - Torque constant. Блок DC Motor принимает, что нет электромагнитных потерь. Это означает, что механическая степень равно электрической степени, рассеянному коэффициентом противо-ЭДС в якоре. Уравнивание этих двух членов дает:
В результате вы задаете или kv, или kt в параметрах блоков.
Если магнитное поле генерируется из токов , текущих через обмотки, Back-emf constant зависит от If тока поля:
где Laf - Field-armature mutual inductance.
Характеристика крутящий момент-скорость для блока DC Motor связана с параметрами на предыдущем рисунке. Когда вы устанавливаете параметр Model parameterization равным By stall torque & no-load speed или By rated power, rated speed & no-load speedблок решает для эквивалентных параметров схемы следующим образом:
Для зависимости крутящий момент и скорость в установившемся режиме, L не имеет никакого эффекта.
Суммируйте напряжения вокруг цикла и переставьте для i:
Замените это значение i в уравнение крутящего момента:
Когда вы устанавливаете параметр Model parameterization равным By stall torque & no-load speedблок использует предшествующее уравнение, чтобы определить значения для R и kt (и эквивалентно kv).
Когда вы устанавливаете параметр Model parameterization равным By rated power, rated speed & no-load speedблок использует номинальную скорость и степень, чтобы вычислить номинальный крутящий момент. Блок использует номинальный крутящий момент и значения скорости без нагрузки в предыдущем уравнении, чтобы определить значения для R и kt.
Блок моделирует J инерции двигателя и λ демпфирования для всех значений параметра Model parameterization. Результирующий крутящий момент на блоке:
Не всегда возможно измерить демпфирование ротора, и демпфирование ротора не всегда предусмотрено на таблице данных производителя. Альтернативой является использование тока без нагрузки для вывода значения для демпфирования ротора.
Для без нагрузки механический крутящий момент, генерируемый электрическим двигателем, должен равняться крутящему моменту демпфирования ротора:
где i noload является током без нагрузки. Если вы выбираете By no-load current для параметра Rotor damping parameterization это уравнение используется в дополнение к уравнению крутящего момента и скорости для определения значений для λ и других коэффициентов уравнения.
Значение демпфирования ротора, заданное непосредственно или в терминах тока без нагрузки, учитывается при определении эквивалентных параметров схемы для опций Model parameterization By stall torque and no-load speed и By rated power, rated speed and no-load speed.
Когда положительный ток течет от электрического + к портам -, положительный крутящий момент действует от механического C к портам R.
Блок DC Motor позволяет вам смоделировать два типа отказов:
Отказ обмотки якоря - Обмотка якоря отказывает и переходит к разомкнутой цепи.
Отказ обмотки возбуждения - Обмотка возбуждения, которая создает отказ магнитного поля и переходит к разомкнутой схеме.
Блок может вызвать события отказа:
В определенное время (временный отказ).
Когда предел тока превышается на более длительный, чем определенный временной интервал (поведенческий сбой).
Можно включать или отключать эти триггерные механизмы отдельно.
Можно выбрать, выдавать ли значения при возникновении отказа, используя параметр Reporting when a fault occurs. Утверждение может принимать форму предупреждения или ошибки. По умолчанию блок не выдает значения.
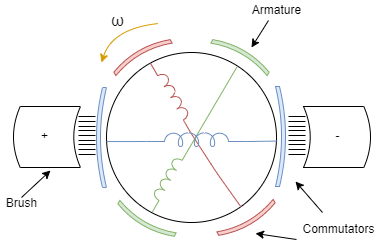
Этот рисунок показывает типовое представление двигателя постоянного тока с кистями, якорями, коммутаторами и их обмотками:
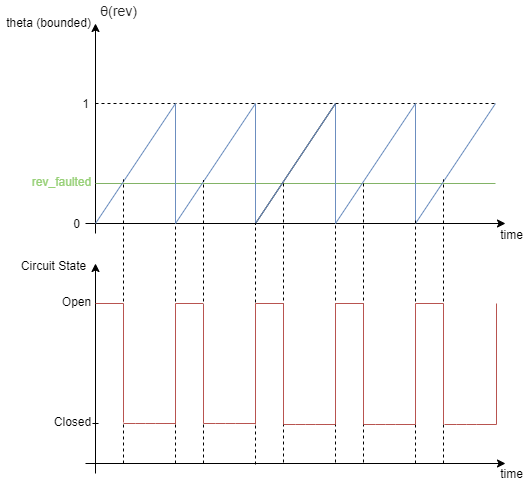
Если вы устанавливаете параметр Enable armature winding open-circuit fault равным Yesякорь прекращает работать в момент времени, заданный параметром Time at which armature winding fault is triggered для временного отказа, или когда токи обмотки превышают значение параметра Maximum permissible armature winding current для поведенческого отказа. Когда якорь отказывает, источник напряжения, соединенный с этим блоком, наблюдает разомкнутую схему для части общего оборота двигателя, заданного параметром Fraction of revolution during which armature is open-circuit rev_faulted. Этот рисунок иллюстрирует поведение состояния схемы для определенного rev_faulted в течение всего периода революции:
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы открыть тепловой порт, щелкните правой кнопкой мыши блок в модели, а затем из контекстного меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловой порт, H на значке блока, и отображает параметры Temperature Dependence и Thermal Port.
Используйте тепловой порт, чтобы симулировать эффекты потерь сопротивления меди, которые преобразуют электрическую степень в тепло. Для получения дополнительной информации об использовании тепловых портов и о параметрах Temperature Dependence и Thermal Port, смотрите Симуляция Термальных эффектов в Вращательных и Поступательных Приводах.
[1] Bolton, W. Mechatronics: Electronic Control Systems in Mechanical and Electrical Engineering, 3-е издание Pearson Education, 2004.
Induction Machine (Single-Phase) | Motor & Drive (System Level) | Shunt Motor | Universal Motor




