Типовой привод вращательного действия от источника напряжения постоянного тока или драйвера ШИМ
Simscape/Электрический/Электромеханический/Мехатронный Приводы
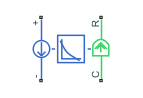
Блок Generic Rotary Actuator реализует модель типового привода вращательного действия, предназначенного для привода от источника напряжения постоянного тока или драйвера ШИМ. Вы задаете характеристики крутящий момент-скорость в терминах табличных значений для питания двигателя при номинальном напряжении. Эта функциональность позволяет вам моделировать двигатель, не ссылаясь на эквивалентную схему.
Архитектура двигателя или привода определяет, каким образом электрические потери зависят от крутящего момента. Для примера двигатель постоянного тока имеет потери, которые пропорциональны квадрату тока. Поскольку крутящий момент пропорционален току, потери также пропорциональны механическому крутящему моменту. Большинство двигателей имеют термин электрических потерь, который пропорциональен квадрату механического крутящего момента. Блок Generic Rotary Actuator вычисляет этот термин потерь, используя Motor efficiency (percent) и Speed at which efficiency is measured параметры, которые вы предоставляете.
Некоторые двигатели также имеют термин потерь, который не зависит от крутящего момента. Примером является двигатель постоянного тока с параллельным возбуждением, где обмотка возбуждения потребляет постоянный ток независимо от нагрузки. Этот эффект учитывается параметром Torque-independent electrical losses.
Эффективность мотора является механической степенью, разделенной на сумму механической степени и обоих членов электрических потерь. Блок принимает, что скорость, с которой задан КПД мотора, находится в квадранте двигателя и, следовательно, положительная.
Можно управлять блоком в обратном направлении, меняя знак приложенного напряжения. Блок H-Bridge, для примера, меняет направление двигателя на противоположное, если напряжение в порту REV больше, чем параметр Reverse threshold voltage. Однако, если вы используете блок назад, задайте данные скорости крутящего момента для прямой операции:
Положительные крутящие моменты и положительные скорости в квадранте двигателя.
Положительный крутящий момент и отрицательные скорости в генерирующем квадранте против часовой стрелки.
Отрицательный крутящий момент и положительная скорость в генерирующем квадранте по часовой стрелке.
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы открыть тепловой порт, щелкните правой кнопкой мыши блок в модели, а затем из контекстного меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловой порт, H на значке блока, и отображает параметры Temperature Dependence и Thermal Port.
Используйте тепловой порт, чтобы симулировать эффекты потерь сопротивления меди, которые преобразуют электрическую степень в тепло. Для получения дополнительной информации об использовании тепловых портов и о параметрах Temperature Dependence и Thermal Port, смотрите Симуляция Термальных эффектов в Вращательных и Поступательных Приводах.
Данные кривой крутящего момента-скорости соответствуют только номинальному напряжению, поэтому блок выдает точные результаты только при приведении в действие плюс или минус номинального напряжения.
В этом блоке требуется, вы должны предоставить данные скорости крутящего момента для полной области значений, в котором вы используете привод. Чтобы использовать привод в областях генерации и торможения, предоставьте дополнительные данные за пределами области нормального двигателя.
Поведение модели чувствительно к данным о скорости крутящего момента. Для примера скорость без нагрузки правильно задана и конечна только, когда данные пересекают ось скорости.
Чтобы прогнать блок из H-Bridge блока:
Не помещайте другие блоки между блоками H-Bridge и Generic Rotary Actuator.
В H-Bridge диалогового окна блока установите Freewheeling mode равным Via one semiconductor switch and one freewheeling diode. Выбор Via two freewheeling diodes не устанавливает выходное напряжение моста в нуль, когда входной сигнал ШИМ низок.
В H-Bridge, Generic Rotary Actuator и Controlled PWM Voltage диалоговых окон блока гарантируют, что для всех трех блоков Simulation mode является одинаковым.
