Синхронное управление машиной с постоянными магнитами
Simscape / Электрический / Контроль / Контроль PMSM
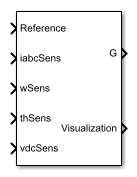
Блок PMSM Field-Oriented Control реализует векторную структуру управления для синхронной машины с постоянными магнитами (PMSM). Векторное управление (FOC) является эффективной стратегией управления электродвигателем переменного тока, которая развязывает крутящий момент и поток путем преобразования стационарных токов фазы во вращающуюся систему координат. Используйте FOC, когда скорость и положение ротора известны, и ваше приложение требует:
Высокий крутящий момент и низкий ток при запуске.
Высокая эффективность.
Структура PMSM FOC разделяет крутящий момент и поток с помощью опорной системы координат ротора d-q. Эта схема показывает общую архитектуру блока.
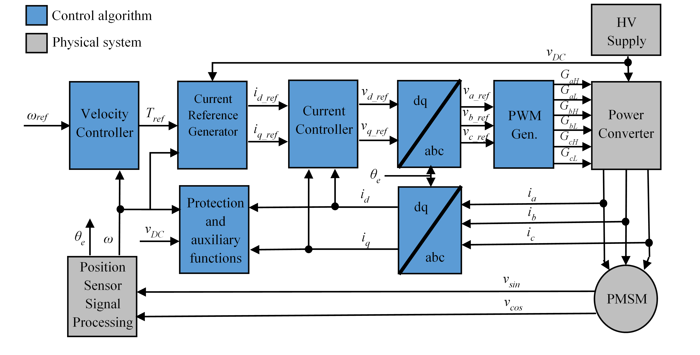
На схеме:
ω и ωref являются измеренными и опорными скоростями вращения, соответственно.
Tref - ссылка электромагнитный крутящий момент.
i и v являются токами статора, напряжениями и нижними индексами d и q представляют ось D и Q, а нижние индексы a, b и c представляют три обмотки статора.
θe - электрический угол ротора.
G - импульс управления ключами, нижние индексы H и L, представляют высокие и низкие, а нижние индексы a, b и c представляют три обмотки статора.
Можно принять решение реализовать управление скоростью или крутящим моментом с Control mode параметр. Блок реализует управление скоростью в точности как показано на схеме. Блок реализует управление крутящим моментом, удалив блок Контроллер и приняв эталонный крутящий момент непосредственно.
Параметры машины известны.
Структура управления реализована с одной частотой дискретизации.
[1] Бернардес, Т., В. Ф. Монтагнер, Х. А. Грюндлинг, и Х. Пиньейру. «Наблюдатель скользящего режима дискретного времени вектором без датчиков синхронной машины с постоянными магнитами». Транзакции IEEE по промышленной электронике. Том 61, № 4, 2014, с. 1679-1691.
[2] Карпюк, С. и К. Лазар. «Быстрое управление током с ограничениями в реальном времени в тяговых приводах с синхронной машиной на постоянных магнитах». Транзакции IEEE по электрификации транспорта. Vol.1, № 4, 2015, с. 326-335.
[3] Хак, М. Э., Л. Чжун, и М. Ф. Рахман. «Улучшенное управление траекторией для синхронного привода с внутренними постоянными магнитами с расширенным рабочим пределом». Журнал электротехники и электроники. Том 22, № 1, 2003, стр. 49.
[4] Ян, Н., Г. Ло, В. Лю и К. Ван. Линейный синхронный двигатель с постоянными магнитами для электрических транспортных средств с помощью интерполяционной таблицы. 7-я Международная конференция по степени и управлению движением. Том 2, 2012, стр. 1015-1019.
