Синхронная машина с постоянными магнитами ссылки генератора
Simscape / Электрический / Контроль / Контроль PMSM
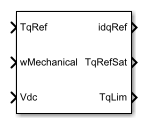
Блок PMSM Current Reference Generator реализует ссылку тока для управления током синхронной машины с постоянными магнитами (PMSM) в d ротора - q системе отсчета .
Обычно этот блок используется в ряде блоков, образующих структуру управления.
Можно сгенерировать ссылку напряжения в система координат, поместив этот блок перед PMSM Current Control или PMSM Current Control with Pre-Control block.
Можно реализовать регулирование скорости, поместив этот блок после блока Velocity Controller.
Вы можете увидеть пример полной структуры управления, от измерений машины до входов машины, в блоке PMSM Field-Oriented Control.
Блок PMSM Current Reference Generator может получить текущую ссылку с помощью одного из следующих методов:
Нулевое управление по оси D (ZDAC)
Пользовательские интерполяционные таблицы
Автоматически сгенерированные интерполяционные таблицы
Для метода ZDAC блок устанавливает ток оси D ссылки к нулю и определяет q-составляющую тока ссылки использование уравнения крутящего момента:
и
где:
Tref - ссылка крутящий момент входа.
p - количество пар полюсов.
ψm - редактирование потока постоянных магнитов.
Для операции ниже номинальной скорости синхронной машины ZDAC является подходящим методом. Выше номинальной скорости требуется контроллер ослабления поля, чтобы настроить ссылку по оси d.
Чтобы предгенерировать оптимальные текущие ссылки для нескольких рабочих точек в автономном режиме, задайте две интерполяционные таблицы с помощью пользовательского подхода интерполяционной таблицы:
и
где:
nm - скорость вращения ротора.
vdc - постоянное напряжение конвертера.
Чтобы позволить блоку создать интерполяционные таблицы, выберите автоматически сгенерированный подход интерполяционной таблицы. Блок генерирует интерполяционную таблицу с помощью двух стратегий:
Максимальный крутящий момент на ампер
Ослабление поля
Выбор между двумя стратегиями основан на индексе модуляции, который может быть вычислен следующим образом:
где Vs - амплитуда напряжения статора, k - коэффициент модуляции, а Vph_max - максимально допустимая фаза напряжение. В случае, когда индекс модуляции больше 1, блок генерирует текущие ссылки, используя процедуру ослабления поля. В противном случае ссылки тока вычисляются с помощью максимального крутящего момента на ампер процедуры.
Можно сгенерировать ссылки на токи в области постоянного крутящего момента (происходящей ниже номинальной скорости) с помощью стратегии максимального крутящего момента на ампер (MTPA).
Прямые и квадратурные компоненты тока статора записаны в терминах угла и величины как:
и
где:
β - угол вектора тока статора.
Is - амплитуда тока статора.
Используя вариант угловой величины d-q токов, уравнение крутящего момента PMSM записывается как:
где Ld и Lq являются прямой и квадратурной индуктивностью, соответственно.
Чтобы получить быстрый переходный процесс и максимизировать крутящий момент с наименьшей возможной амплитудой тока статора, MTPA накладывает (dTe )/ dβ = 0 на уравнение крутящего момента, которое приводит к
id_mtpa тока d-оси MTPA записывается в терминах компонента q-оси iq_mtpa путем подстановки d-q токов назад от их вариантов угла и величины:
Наконец, путем включения предыдущего уравнения в вариант d-q уравнения крутящего момента PMSM, получается следующий полином:
Q- компонента получается путем решения этого полинома.
Можно сгенерировать текущие ссылки в вышеуказанной области номинальной скорости с помощью стратегии ослабления поля (FW).
Выше номинальной скорости напряжение статора ограничено преобразователем степени и доступным напряжением постоянного тока. Максимальное напряжение статора:
где Vph_max - максимальное доступное напряжение фазы статора.
Статические уравнения напряжения для PMSMs
и
Для скоростей ротора, превышающих номинальную, сопротивление статора незначительно, и ослабление поля d-составляющей тока по оси id_fw получается в терминах составляющей q-составляющей iq_fw из vq установившегося уравнения:
Наконец, путем включения id_fw уравнения в уравнение крутящего момента PMSM, получается следующий полином:
Q- компонента получается путем решения этого полинома.
Параметрами машины являются константы.
Автоматически сгенерированные ссылки тока вводят задержку в фазе предварительной симуляции. Для приводов PMSM средней мощности задержка составляет около 300 мс.
[1] Хак, М. Э., Л. Чжун, и М. Ф. Рахман. «Улучшенное управление траекторией для синхронного привода с внутренними постоянными магнитами с расширенным рабочим пределом». Журнал электротехники и электроники. Том 22, № 1, 2003, стр. 49.
[2] Carpiuc, S., C. Lazar, and D. I. Patrascu. Оптимальное управление крутящим моментом синхронной машины с внешним возбуждением. Контрольная инженерия и прикладная информатика. Том 14, № 2, 2012, стр. 80-88.








