Шестифазный синхронный двигатель с постоянными магнитами с синусоидальным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
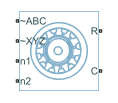
Блок PMSM (Six-Phase) моделирует синхронную машину с постоянными магнитами (PMSM) с шестифазным статором со звездной обмоткой.
Шестифазный PMSM имеет две группы трехфазных обмоток статора: группу ABC и группу XYZ. Эти две группы имеют 30 степени фазовый сдвиг.
Рисунок показывает эквивалентную электрическую схему для обмоток статора.
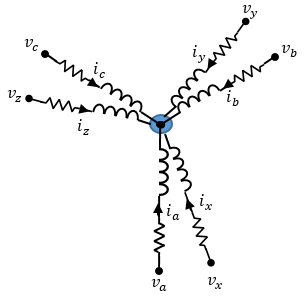
Напряжения на обмотках статора определяются:
где:
va, vb и vc являются отдельными напряжениями фазы от порта ~ABC до нейтрального порта n1.
vx, vy и vz являются отдельными напряжениями фазы от порта ~XYZ до нейтрального порта n2.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic являются токами, протекающими от порта ~ABC к порту n1.
ix, iy и iz являются токами, протекающими от порта ~XYZ к порту n2.
и - скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и шесть обмоток способствуют общему потоку, связывающему каждую обмотку. Общий поток определяется:
где:
ψa, ψb, ψc, ψx, ψy, и ψz являются полными потоками, которые связывают каждую обмотку статора.
Laa, Lbb, Lcc, Lxx, Lyy, и Lzz являются самоиндукциями обмоток статора.
Lab, Lac, Lba и так далее являются взаимными индуктивностями обмоток статора.
ψam, ψbm, ψcm, ψxm, ψym, и ψzm являются потоками постоянного магнита, связывающими обмотки статора.
Индуктивности в обмотках статора являются функциями электрического угла ротора, заданными как:
где:
θr - механический угол ротора.
θe - электрический угол ротора.
rotor offset 0 если вы задаете электрический угол ротора относительно оси d, или -pi/2 если задан электрический угол ротора относительно оси q.
Ls является самоиндуктивностью статора на фазу. Это значение является средней индуктивностью каждой из обмоток статора.
Lm - индуктивность статора. Это значение является колебанием самоиндуктивности и взаимной индуктивности с изменением угла ротора.
Ms является взаимной индуктивностью статора. Это значение является средней взаимной индуктивностью между обмотками статора.
Обмотка связи с постоянными магнитами a-a' на максимуме, когда θe = 0 ° и нули, когда θe = 90 °. Поэтому связанный поток мотора определяется:
где ψm - редактирование потока постоянных магнитов.
Применение развязанного преобразования к электрическим уравнениям блока создает выражение для крутящего момента, которое не зависит от угла ротора.
Развязанное преобразование определяется:
Матрица преобразования, P, имеет это псевдоортогональное свойство:
Использование развязанного преобразования на напряжениях и токах обмотки статора преобразует их в dq0 систему координат, которая не зависит от угла ротора.
Чтобы получить d-ось, q-ось и напряжения статора с нулевой последовательностью и потокосцепления для групп ABC и XYZ, примените преобразование к уравнениям потокосцепления напряжения и потока:
где:
vd, vq, vz1, vz2, v01, и v02 d, q, z1, и z2 компоненты и напряжения статора нулевой последовательности для ABC и групп XYZ, определенных:
id, iq, iz1, iz2, i01, и i02 d - ось, q - ось и ток статора нулевой последовательности для ABC и групп XYZ, определенных:
- индуктивность d оси статора.
- индуктивность q оси статора.
- индуктивность нулевой последовательности статора.
ω - механическая скорость вращения ротора.
N - количество пар полюсов постоянных магнитов ротора.
Уравнение крутящего момента определяется:
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
[1] Krause, Paul, Oleg Wasynczuk, Scott Sudhoff, and Steven Pekarek, eds. Анализ электрических машин и приводных систем. Хобокен, Нью-Джерси, США: John Wiley & Sons, Inc., 2013. https://doi.org/10.1002/9781118524336.
[2] Су, Цзянь Ён, Цзинь Бо Ян и Гуи Цзе Ян. Исследования в области управления векторами и методы шестифазного PMSM. Перспективные исследования материалов 516-517 (май 2012): 1626-31. https://doi.org/10.4028/www.scientific.net/AMR.516-517.1626.


