Контроллер обратной связи в дискретном времени с интегральным действием
Simscape/Электрический/Управление/Общее управление
Блок State-Feedback Controller реализует контроллер обратной связи в дискретном времени с интегральным действием. Используйте этот блок для управления линейными системами с одним или несколькими входами и одним или несколькими выходами. Интегральное действие служит для устранения статической ошибки в управляемых выходах. Можно задать контроллер с помощью предварительно вычисленного оптимального усиления или использовать модель пространства состояний вашей системы, чтобы сгенерировать этот коэффициент усиления с помощью размещения полюса.
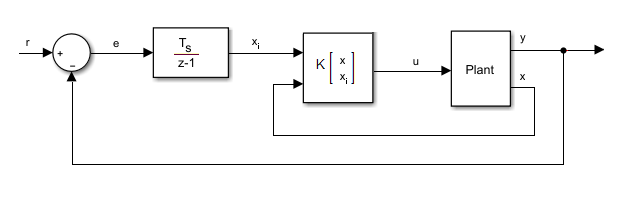
Интеграл ошибки отслеживания, xi, является дополнительным состоянием, которое обеспечивает нулевую установившуюся ошибку для системы с обратной связью. Расширенный вектор состояния
Где:
x - вектор состояния.
xi является интегралом ошибки отслеживания.
xe - расширенный вектор состояния.
Поэтому действие управления является
Где:
K - матрица обратной связи, то есть размещение полюса.
u - контроллер выход.
Измерение и оценка состояния системы происходят вне контроллера.
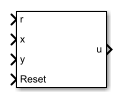
r - Ссылка на объектОпорный сигнал системы объекта.
Типы данных: single | double
x - Вектор состоянияИзмеренный или оцененный вектор состояния системы.
Типы данных: single | double
Reset - Сброс интегратораВнешний сигнал сброса (переднее ребро) для интегратора.
Типы данных: Boolean
y - Производительность объектаВыходной сигнал системы объекта.
Типы данных: single | double
u - Контроллер выходВыходной сигнал системы управления.
Типы данных: single | double
State-feedback design - Генерация контроллераState-feedback gain (по умолчанию) | Desired eigenvaluesВыберите стратегию для параметризации усиления контроллера:
State-feedback gain - Непосредственно задайте коэффициент усиления контроллера
Desired eigenvalues - Задайте модель объекта управления и желаемые собственные значения, из которых можно сгенерировать коэффициент усиления контроллера
State-feedback parameterization - Параметризация с обратной связью по состояниюDiscrete-time (по умолчанию) | Continuous-timeВыберите стратегию для параметризации матриц пространства состояний и желаемых полюсов для контроллера. Реализация блока дискретна независимо от этой параметризации.
Чтобы включить этот параметр, установите State-feedback design равным Desired eigenvalues.
Controller matrix - Матрица контроллераМатрица обратной связи контроллера. Чтобы определить матрицу контроллера, если у вас есть лицензия для Control System Toolbox™, используйте lqr или lqi функция.
Чтобы включить этот параметр, установите State-feedback design равным State-feedback gain.
Discrete-time A matrix - Матрица за дискретное времяМатрица состояний модели пространства состояний в дискретном времени. Матрица A должна быть квадратной, с количеством строк и столбцов, равным порядку системы.
Чтобы включить этот параметр, установите State-feedback parameterization равным Discrete-time.
Discrete-time B matrix - матрица B за дискретное времяВходная матрица модели пространства состояний в дискретном времени. Матрица B должна иметь количество строк, равное порядку системы, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите State-feedback parameterization равным Discrete-time.
Discrete-time C matrix - матрица C за дискретное времяВыходная матрица модели пространства состояний в дискретном времени. Матрица C должна иметь количество строк, равное количеству выходов системы, и количество столбцов, равное порядку системы.
Чтобы включить этот параметр, установите State-feedback parameterization равным Discrete-time.
Discrete-time D matrix - D-матрица за дискретное времяИсходная матрица модели пространства состояний в дискретном времени. D- матрицы должно иметь количество строк, равное количеству системных выходов, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите State-feedback parameterization равным Discrete-time.
Continuous-time A matrix - Матрица за непрерывное времяМатрица состояний модели пространства состояний в непрерывном времени. Матрица A должна быть квадратной, с количеством строк и столбцов, равным порядку системы.
Чтобы включить этот параметр, установите State-feedback parameterization равным Continuous-time.
Continuous-time B matrix - B матрица за непрерывное времяВходная матрица модели пространства состояний в непрерывном времени. Матрица B должна иметь количество строк, равное порядку системы, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите State-feedback parameterization равным Continuous-time.
Continuous-time C matrix - матрица C за непрерывное времяВыходная матрица модели пространства состояний в непрерывном времени. Матрица C должна иметь количество строк, равное количеству выходов системы, и количество столбцов, равное порядку системы.
Чтобы включить этот параметр, установите State-feedback parameterization равным Continuous-time.
Continuous-time D matrix - D-матрица за непрерывное времяИсходная матрица модели пространства состояний в непрерывном времени. D- матрицы должно иметь количество строк, равное количеству системных выходов, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите State-feedback parameterization равным Continuous-time.
Discretization sample time - Дискретизация шага расчетаЗначение, используемое для дискретизации матриц пространства состояний, а также аппроксимации собственных значений в дискретном времени.
Чтобы включить этот параметр, установите State-feedback parameterization равным Continuous-time и Sample time (-1 for inherited) к -1.
Desired eigenvalues (discrete) - Собственные значения наблюдателяУкажите местоположение собственных значений, лежащих в модуль круге. Коэффициент усиления контроллера затем вычисляется на основе этих собственных значений. Размер вектора должен быть равен системному порядку плюс количество выходов.
Control action upper limit — umax5 (по умолчанию) | скаляром больше, чем значение параметра Control action lower limitВерхний предел для сигнала выхода управления.
Control action lower limit — umin0 (по умолчанию) | скаляромНижний предел для сигнала выхода управления.
Sample time (-1 for inherited) - Интервал отбора проб-1 (по умолчанию) | значение по умолчанию или положительное числоВременной интервал между выборками. Если блок находится внутри триггируемой подсистемы, наследуйте шаг расчета, установив для этого параметра значение -1. Если этот блок находится в непрерывной модели с шагом переменных, задайте шаг расчета явно. Для получения дополнительной информации смотрите Что такой Шаг расчета? и задайте шаг расчета.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.


