Система AC4C возбуждения синхронной машины в дискретном времени или в непрерывном времени, включая автоматический регулятор напряжения и возбудитель
Simscape/Электрический/Управление/SM Управление
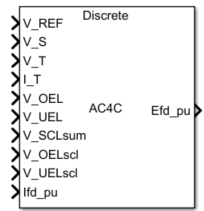
Блок SM AC4C реализует системную модель возбуждения AC4C типа синхронной машины в соответствии с IEEE 421.5-2016[1].
Используйте этот блок для моделирования управления и регулирования напряжения возбуждения синхронной машины, которая работает как генератор, используя вращающийся возбудитель переменного тока.
Можно переключаться между непрерывной и дискретной реализациями блока при помощи параметра Sample time (-1 for inherited). Чтобы сконфигурировать интегратора на непрерывное время, установите свойство Sample time (-1 for inherited) на 0. Чтобы сконфигурировать интегратора на дискретное время, установите свойство Sample time (-1 for inherited) на положительное, ненулевое значение или на -1 наследование шага расчета из вышестоящего блока.
Блок SM AC4C состоит из четырех основных компонентов:
Компенсатор Тока изменяет измеренное напряжение контакта как функцию от тока контакта.
Преобразователь Измерения Напряжения моделирует динамику терминального преобразователя напряжения с помощью lowpass фильтра.
Компонент Элементы Управления Возбуждением сравнивает выход преобразователя напряжения с терминальным опорным напряжением, чтобы создать ошибку напряжения. Затем эта ошибка напряжения передается через регулятор напряжения для создания напряжения возбуждения возбуждения.
Вращающийся Возбудитель Переменного Тока моделирует вращающийся возбудитель переменного тока, который создает напряжение возбуждения, которое прикладывается к управляемой синхронной машине. Блок также подает ток возбуждающего поля (которому задается стандартный VFE символа) обратно в систему возбуждения.
Эта схема показывает общую структуру системной модели AC4C возбуждения:
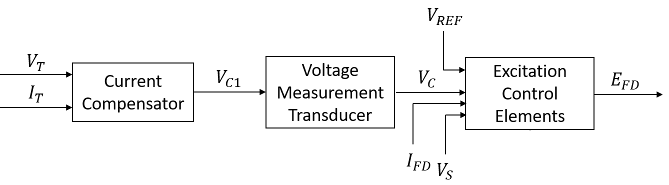
На схеме:
VT и IT являются измеренными контактным напряжением и током синхронной машины.
VC1 - токо-компенсируемое контактное напряжение.
VC - фильтрованное, компенсированное током напряжение контакта.
VREF - базовое напряжение клеммы.
VS - напряжение стабилизатора степени.
EFE и VFE являются напряжением возбуждающего поля и током, соответственно.
EFD и IFD являются напряжением возбуждения и током, соответственно.
В следующих разделах подробно описывается каждая из основных частей блока.
Компенсатор тока моделируется как:
где:
RC - сопротивление компенсации нагрузки.
XC - реактивное сопротивление компенсации нагрузки.
Преобразователь измерения напряжения реализован как Low-Pass Filter блок с постоянными по времени TR. Дискретные и непрерывные реализации см. в документации для этого блока.
Эта схема иллюстрирует общую структуру элементов управления возбуждением:
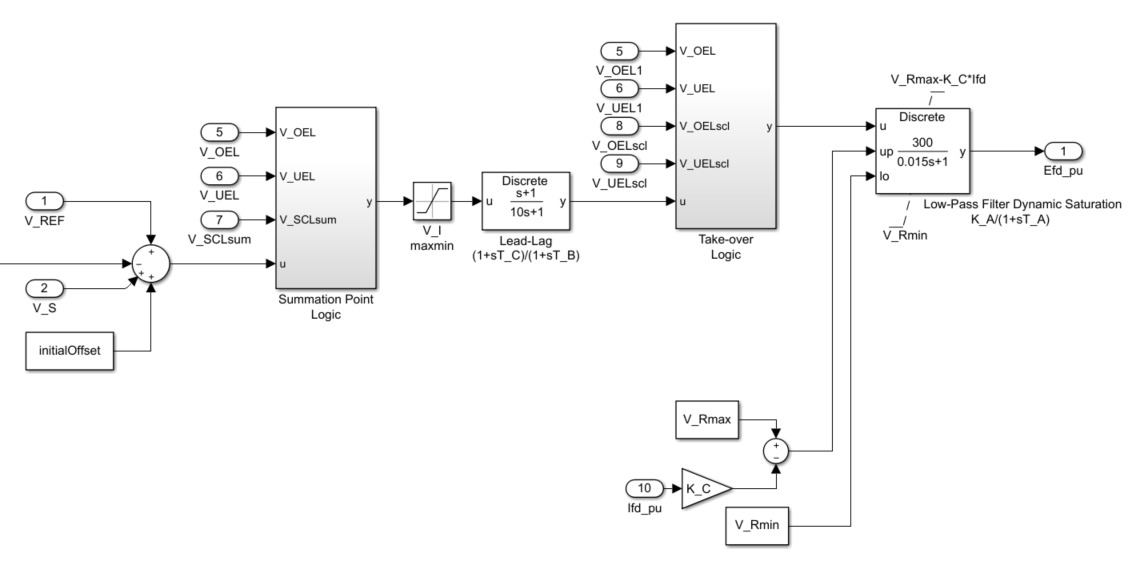
В отличие от других моделей возбуждения переменного тока, SM AC4C блок включает полный тиристорный мост, который моделирует выходную схему возбудителя и регулятор напряжения, который управляет срабатыванием тиристорных мостов. Вместо того, чтобы иметь обратную связь по скорости, стабилизация системы возбуждения осуществляется через сеть задержки вывода и фильтр lowpass.
На схеме:
Подсистема Summation Point Logic моделирует входное местоположение точки суммирования для ограничителя сверхэксцитирования (OEL), ограничителя недискриминации (UEL) и ограничителя тока статора (SCL) напряжений. Для получения дополнительной информации об использовании ограничителей с этим блоком, смотрите Полевые ограничители тока.
Блок Lead-Lag моделирует дополнительную динамику, связанную с регулятором напряжения. Здесь TC - постоянная времени выполнения, а TB - постоянная времени задержки. Дискретные и непрерывные реализации см. в документации для блока Lead-Lag.
Подсистема Take-over Logic моделирует входное расположение точки захвата для напряжений OEL, UEL и SCL. Для получения дополнительной информации об использовании ограничителей с этим блоком, смотрите Полевые ограничители тока.
Блок Low-Pass Filter моделирует основную динамику регулятора напряжения. Здесь KA - коэффициент усиления регулятора, а TA - основная временная константа регулятора. Минимальные и максимальные пределы насыщения против насыщения обмотки для блока VRmin и VRmax, соответственно.
Нижняя часть схемы моделирует ограничения, основанные на Ifd.
Можно использовать различные ограничители тока возбуждения, чтобы изменить выход регулятора напряжения в небезопасных условиях работы:
Используйте ограничитель перенапряжения, чтобы предотвратить перегрев обмотки возбуждения из-за чрезмерной потребности в токе возбуждения.
Используйте ограничитель недооценки, чтобы увеличить возбуждение поля, когда оно слишком низко, что рискует десинхронизацией.
Используйте ограничитель тока статора, чтобы предотвратить перегрев обмоток статора из-за сверхтоков.
Приложите выход любого из этих ограничителей в одной из следующих точек:
Точка суммирования как часть цикла обратной связи автоматического регулятора напряжения (AVR)
Точка принятия для переопределения обычного поведения AVR
Если вы используете ограничитель тока статора в точке суммирования, используйте одну входную VSCLsum. Если вы используете ограничитель тока статора в точке захвата, используйте и вход перенапряжения, и VOELscl, и вход недискажения, VUELscl.
[1] Рекомендуемая практика IEEE для системных моделей возбуждения для исследований устойчивости системы степеней. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
