Четырех- или пятифазная переключаемая реактивная машина (SRM)
Simscape/Электрический/Электромеханический/Реактивные & Шаговый
Блок Switched Reluctance Machine (Multi-Phase) представляет четырёх- или пятифазную переключенную реактивную машину (SRM).
Схема показывает конструкцию мотора для четырехфазной машины.
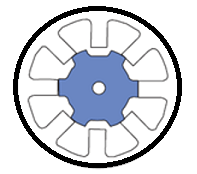
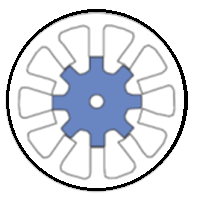
Схема показывает конструкцию мотора для пятифазной машины.
Угол штриха ротора для многофазной машины
где:
θst - камень угла.
Ns - количество фаз.
Nr - количество полюсов ротора.
Производительность крутящего момента, β, одного полюса ротора,
Математическая модель для переключаемой реактивной машины (SRM) является сильно нелинейной из-за влияния магнитного насыщения на кривую потокосцепления с углом λ (θph). Фаза напряжения для SRM
где:
vph - напряжение на фазу.
Rs - сопротивление статора на фазу.
iph - ток на фазу.
λph - редактирование потока на фазу.
θph - угол на фазу.
Переписывание фазы уравнения напряжения в терминах частных производных приводит к этому уравнению:
Переходная индуктивность определяется как
или более просто как
Обратная электродвижущая сила определяется как
Подстановка этих членов в переписанное уравнение напряжения приводит к этому уравнению напряжения:
Применение формулы совместной энергии к уравнениям для крутящего момента,
и энергия,
приводит к интегральному уравнению, которое задает мгновенный крутящий момент на фазу, то есть
Интегрирование над фазами дает это уравнение, которое задает полный мгновенный крутящий момент как
Уравнение для движения
где:
J - инерция ротора.
ω - механическая скорость вращения.
T - крутящий момент ротора. Для блока Switched Reluctance Machine крутящий момент течет от корпуса машины (порт C блока) к ротору машины (порт R блока).
TL - крутящий момент нагрузки.
J - инерция ротора.
Bm - демпфирование ротора.
Для высокоточного моделирования и разработки управления используйте эмпирические данные и вычисление конечного элемента, чтобы определить кривую редактирования с точки зрения тока и угла, то есть
Для низкоточного моделирования можно также аппроксимировать кривую с помощью аналитических методов. Один из таких методов [2] использует эту экспоненциальную функцию:
где:
λsat - редактирование насыщенного потока.
f (θr) получают расширением Фурье.
Для расширения Фурье используйте первые два четных условия этого уравнения:
где a > b,
и
Нулевой угол ротора соответствует полюсу ротора, который идеально выровнен с a -фазой, то есть пиковым потоком.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
[1] Болдея, И. и С. А. Насар. Электроприводы. 2nd Ed. New York: CRC Press, 2005.
[2] Илис-Спонг, М., Р. Марино, С. Пересада и Д. Тейлор. «Линейное управление с обратной связью переключаемых реактивных двигателей». Транзакции IEEE по автоматическому управлению. Том 32, № 5, 1987, стр. 371-379.



