Этот пример показывает, как настроить электропривод с помощью структуры каскадного регулирования.
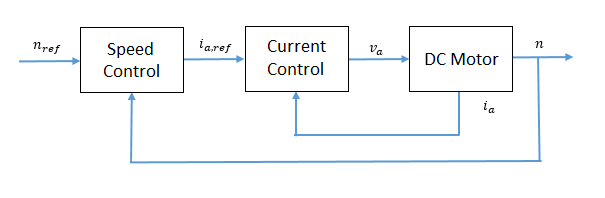
Рисунок показывает цикл управления с обратной связью, который использует структуру каскадного регулирования. Внешний контур регулировки скорости действует медленнее, чем внутренний контур управления током.
Чтобы удовлетворить необходимой эффективности управления для простой дискретной модели объекта управления, Gf (z-1), используйте замкнутую систему управления с ПИ-регулятором (z-1). Эффективность переходного процесса может быть выражена в терминах перерегулирования. Перерегулирование уменьшается относительно коэффициента затухания:
где,
σ перерегулирование.
.r- коэффициент затухания.
Время отклика, tr, зависит от демпфирования и собственной частоты, ωn, так что:
Если и < 0.7,
Если и ≥, 0.7,
Общий рабочий процесс разработки ПИ-контроллера для системы первого порядка:
Дискретизируйте модель объекта управления с помощью метода дискретизации нулевого порядка (ZOH). То есть учитывая, что уравнение первого порядка, представляющее объект,
где,
Km - коэффициент усиления первого порядка.
Tm - константа времени системы первого порядка.
Настройка
приводит к дискретной модели объекта управления,
где Ts - период дискретизации дискретного контроллера.
Напишите представление в дискретном времени для ПИ-контроллера, используя то же преобразование. Для
настройка
приводит к дискретным моделям контроллеров,
Объединение дискретных уравнений для объекта управления и контроллера приводит к передаточной функции замкнутого цикла для системы,
Знаменателем передаточной функции является характеристический полином. То есть,
Характеристический полином для достижения необходимой эффективности задан как
где,
Чтобы определить параметры контроллера, установите характеристический полином для системы, равный характеристическому полиному для необходимой эффективности. Если
тогда
и
Решение для q0 и q1 выражений
и
Поэтому общие уравнения для пропорциональных и интегральных параметров управления для системы первого порядка
и
Принимая, что для системы в модели примера Kb = Kt, упрощенные математические уравнения для напряжения и крутящего момента двигателя постоянного тока являются
и
где:
va - напряжение якоря.
ia - ток якоря.
La - индуктивность якоря.
Ra - сопротивление якоря.
ω - скорость вращения ротора
Te - крутящий момент двигателя.
Tload - крутящий момент нагрузки.
Jm - момент инерции ротора.
Bm - коэффициент вязкого трения.
Kb является константой пропорциональности.
Чтобы настроить токовый контроллер, примите, что модель линейная, то есть что задняя электродвижущая сила, как представлено Kbω, незначительна. Это предположение позволяет аппроксимировать модель объекта управления помощью этого уравнения Лапласа первого порядка:
Учитывая системные требования, теперь можно решить для KP и KI. Требования к токовому контроллеру в модели примера:
Шаг расчета, Ts = 1 мс.
Перерегулирование,
Время отклика, tr = 0,11 с.
Поэтому пропорциональные и интегральные параметры для токового контроллера:
Чтобы настроить контроллер скорости, аппроксимируйте модель объекта управления с помощью простой модели. Сначала примите, что внутренний цикл намного быстрее, чем внешний контур. Также примите, что нет никакой статической ошибки. Эти допущения допускают использование системы первого порядка путем принятия передаточной функции 1 для внутреннего цикла тока.
Чтобы вывести скорость вращения в оборотах в минуту, передаточная функция умножается на множитель 30/ Чтобы взять за вход управления ток якоря вместо крутящего момента двигателя, передаточная функция умножается на константу пропорциональности, Kb. Получившееся приближение для модели объекта управления контура
У контроллера скорости те же шаг расчета и требования к перерегулированию как и у токового контроллера, но время отклика медленнее, так что:
Время дискретизации Ts = 1 мс.
Перерегулирование
Время отклика tr = 0,50 с.
Поэтому пропорциональные и интегральные параметры для контроллера скорости:
Исследуйте компоненты двигателя постоянного тока и каскадного контроллера.
Откройте модель. В MATLAB® в командной строке введите
model = 'ee_dc_motor_control'
open_system(model)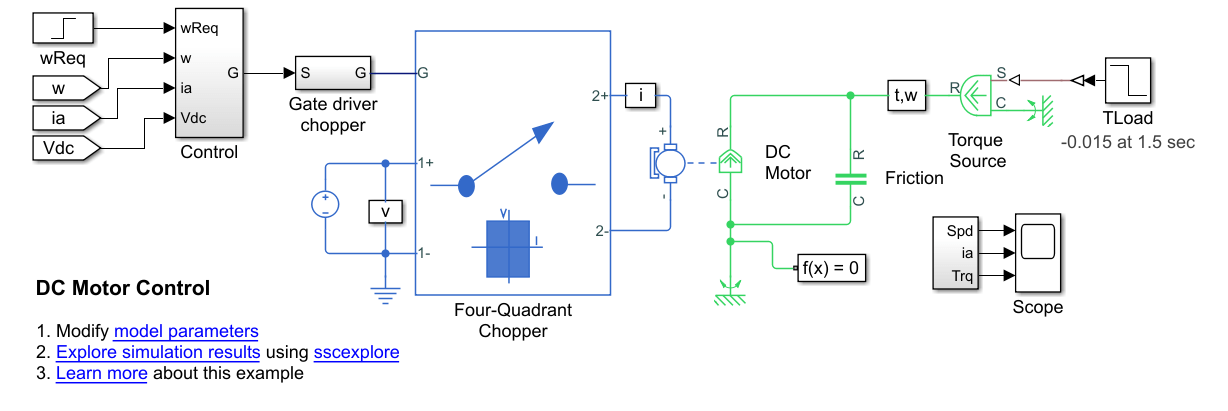
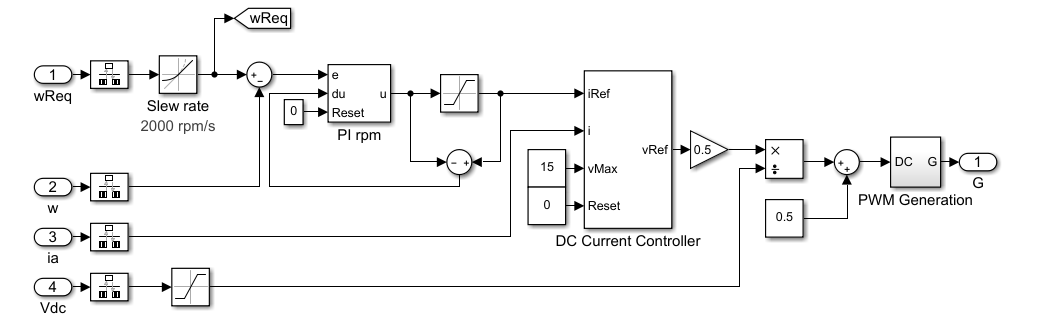
Подсистема Control содержит модель каскадной системы управления, созданной с использованием блоков из Simulink® библиотека.
Блок Four Quadrant Chopper представляет четырехквадрантный прерыватель DC-DC, который содержит два мостовых рычага, каждый из которых имеет два IGBT (Ideal, Switching) блока. Когда входное напряжение превышает порог 0.5 V, блоки IGBT (Ideal, Switching) ведут себя как линейные диоды с прямым напряжением 0.8 V и сопротивление 1e-4 ом. Когда пороговое напряжение не превышено, блоки IGBT (Ideal, Switching) действуют как линейные резисторы с проводимостью в нерабочем состоянии 1e-5 1/Ом.
Симулируйте модель.
sim(model)
Просмотр результатов. Откройте Scope блок.
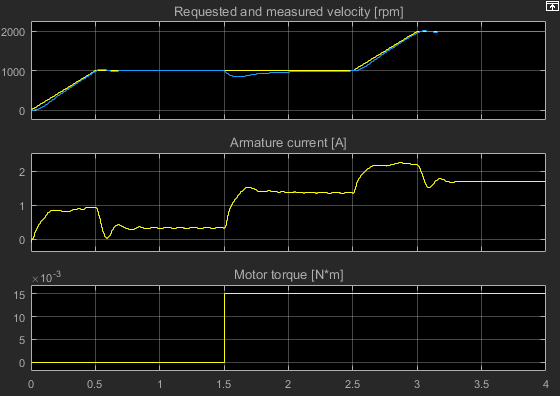
На 1,5 секунде прикладывается крутящий момент нагрузки, который приводит к установившейся ошибке.
Настройте контроллер двигателя постоянного тока. ee_getDCMotorFirstOrderPIParams функция вычисляет пропорциональную составляющую, KP и интегральную составляющую, KI, для системы первого порядка в этом примере.
Синтаксис функции: [Kp, Ki] = getParamPI(Km,Tm,Ts,sigma,tr).
Входными параметрами для функции являются системные параметры и требования к контроллеру:
Km - коэффициент усиления первого порядка.
Tm - временная константа системы первого порядка.
Ts - период дискретизации дискретного контроллера.
sigma - желаемый максимальный перерегулирование, σ.
tr - желаемое время отклика.
Чтобы изучить уравнения в функции, введите
edit ee_getDCMotorFirstOrderPIParamsЧтобы вычислить параметры контроллера с помощью функции, сохраните эти системные параметры в рабочей области:
Ra=4.67; % [Ohm] La=170e-3; % [H] Bm=47.3e-6; % [N*m/(rad/s)] Jm=42.6e-6; % [Kg*m^2] Kb=14.7e-3; % [V/(rad/s)] Tsc=1e-3; % [s]
Вычислите параметры для настройки токового контроллера как функцию от параметров и требований к внутреннему контроллеру:
Km = 1/Ra.
Tm = La/Ra.
Ts = Tsc.
sigma = 0.05.
Tr = 0.11.
[Kp_i, Ki_i] = ee_getDCMotorFirstOrderPIParams(1/Ra,La/Ra,Tsc,0.05,0.11)
Kp_i =
7.7099
Ki_i =
455.1491Параметры усиления для токового контроллера сохраняются в рабочей области.
Вычислите параметры настройки контроллера скорости на основе параметров и требований к внешнему контроллеру:
Km = Kb*(30/pi).
Tm = Jm/Ra.
Ts = Tsc.
sigma = 0.05.
Tr = 0.5.
[Kp_n, Ki_n] = ee_getDCMotorFirstOrderPIParams((Kb*(30/pi))/Bm,Jm/Bm,Tsc,0.05,0.5)
Kp_n =
0.0045
Ki_n =
0.0405Параметры усиления для контроллера скорости сохраняются в рабочей области.
Симулируйте модель, используя сохраненные параметры усиления для скорости и контроллеров.
sim(model)
Просмотр результатов. Откройте Scope блок.
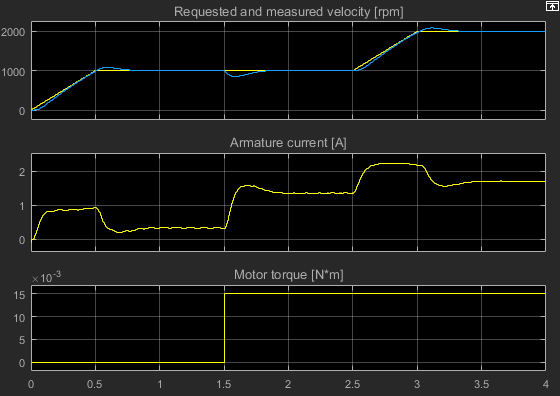
Перерегулирования немного больше, однако на изменение крутящего момента нагрузки контроллер реагирует гораздо быстрее.
Inertia | Rotational Electromechanical Converter | Rotational Friction
