Моделируйте усиления и потери радара и оценивайте эффективность в различных окружениях
Приложение Radar Designer является интерактивным инструментом, который помогает инженерам и системным аналитикам в высокоуровневом проекте и оценке радиолокационных систем на ранней стадии разработки радара. Используя приложение, вы можете:
Оцените и сравните несколько радиолокационных проектов за один сеанс
Добавьте smart radar, окружение и целевые строения Radar Designer, чтобы прыгнуть-начать анализ
Включение эффектов на окружающую среду из-за кривизны Земли, атмосферы, местности и осадков
Добавьте пользовательские поперечные сечения радара-мишени, модели антенны/решётки и как не зависящие от области значений, так и зависящие от области значений
Экспортируйте и сохраняйте результаты, сеансы, модели и графики, чтобы продолжить анализ
MATLAB® Панель инструментов: На вкладке Apps, в разделе Signal Processing and Communications, нажмите значок приложения.
Командная строка MATLAB: Ввод radarDesigner.
Проектируйте радар для установки на верхнюю часть грузовика. Отрегулируйте расчётные параметры, чтобы радар мог работать в туманных условиях и все еще делать целевую область значений. Экспортируйте проект сеанс в Рабочее пространство MATLAB.
Откройте Radar Designer. В командной строке введите
radarDesigner
Automotive Radar опция. Приложение задает типовой проект радара, цель и параметры окружения.
Радар, который вы проектируете, должен быть установлен на 3 метра над землей. На Radar вкладка, в Antenna and Scanning сечение, измените Antenna Height с 1 метра до 3 метров.
На Environment вкладка, в Precipitation сечение, задайте Precipitation Type следующим Fog и установите Fog Density равным Heavy.
Как SNR vs Range график и Metrics and Requirements таблица показывает, что радар удовлетворяет пороговой максимальной области значений, но не достигает желаемой максимальной области значений 300 метров.
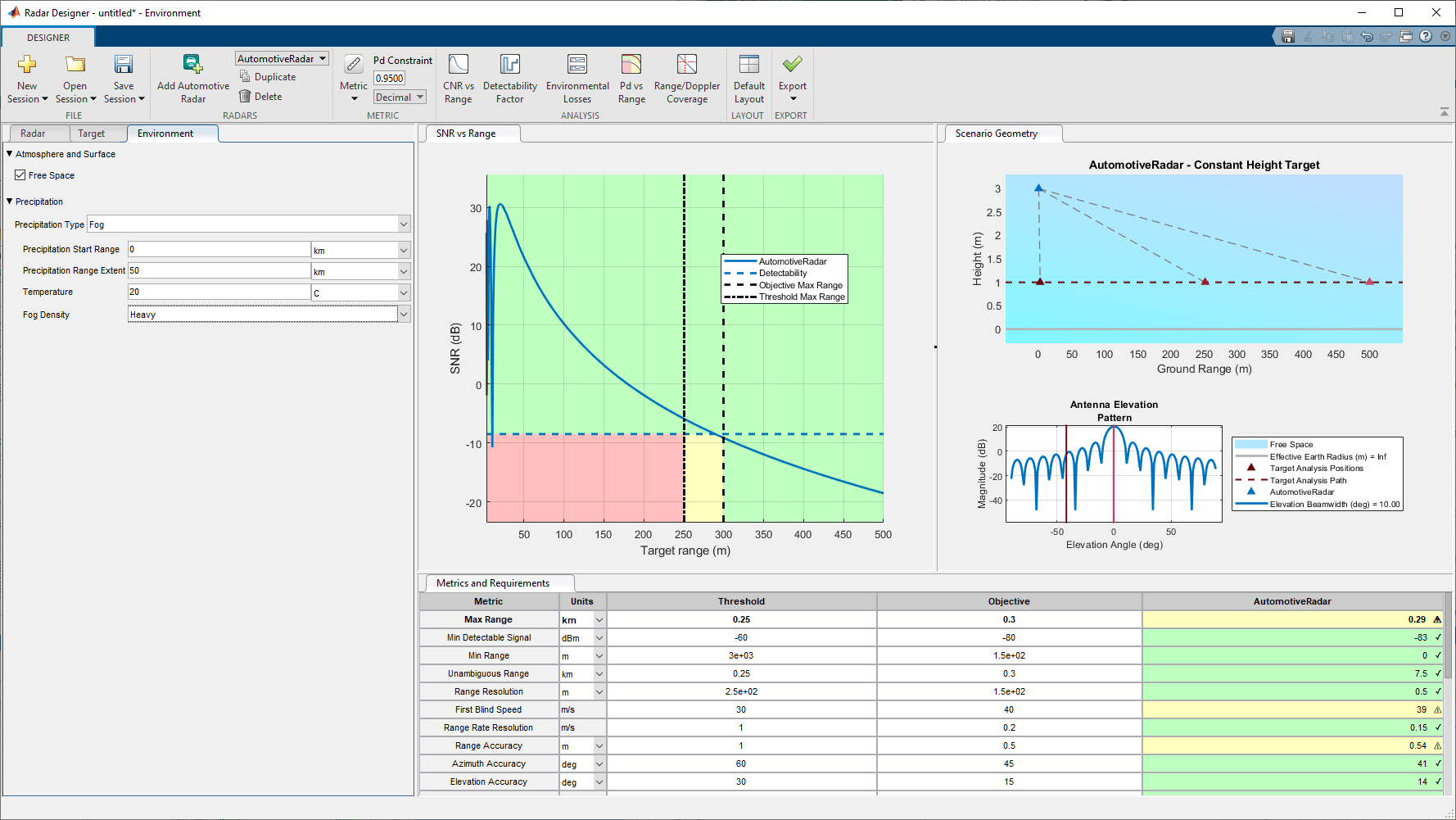
Увеличьте передаваемую степень, чтобы достичь более высокой максимальной области значений. На Radar вкладка, в Main сечение, увеличение Peak Power на 4e-05
kW. График и таблица показывают, что радар удовлетворяет требованию с новым значением степени.
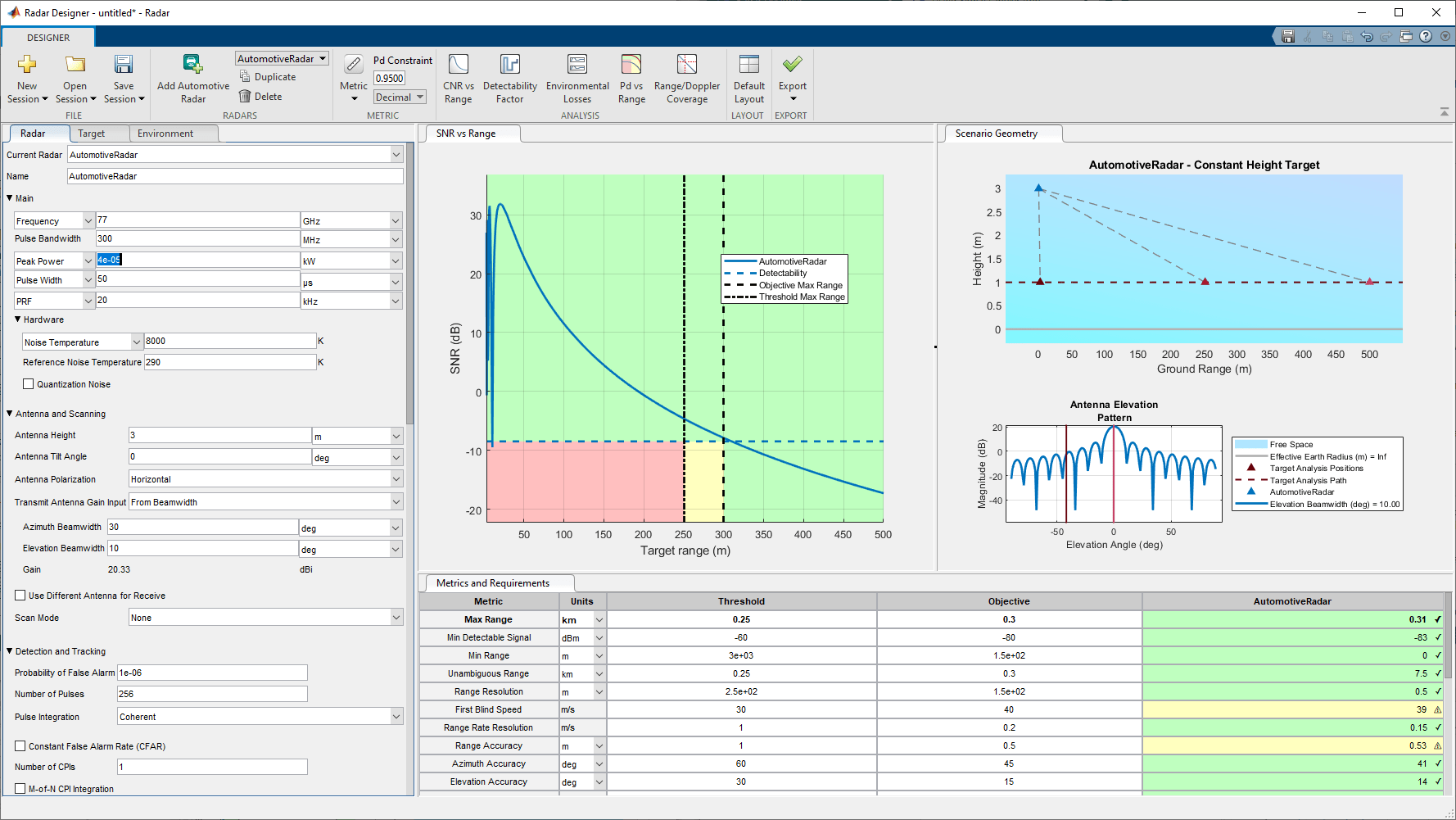
Экспорт проекта радара в Рабочее пространство MATLAB. На панели инструментов нажмите Export и выберите Generate Metrics Report чтобы сгенерировать форматированный отчет о числовых метриках.
Radar - Расчётные параметрыЧтобы включить параметры Radar, нажмите New Session на панели инструментов приложения, чтобы загрузить одну из встроенных строений Radar Designer. Используйте раздел Radars на панели инструментов приложения, чтобы добавить, повторить или удалить проекты радаров во время сеанса.
Используйте список Current Radar, чтобы переключиться между различными проектами радаров в течение одного сеанса.
Используйте поле Name, чтобы изменить имя текущего выбранного радара.
Main - Настройки импульса и несущейИспользуйте эти параметры, чтобы задать настройки импульса и несущей, такие как несущая частота и переданная степень.
| Параметр | Описание |
|---|---|
Волна несущей Frequency (по умолчанию) или Wavelength | Несущая частота или длина волны несущей, заданная как скаляр.
|
| Pulse Bandwidth | Шумовая полоса переданного импульса, заданная в виде скаляра в Hz, kHz, MHz, или GHz. |
Average Power (по умолчанию) или Peak Power | Средняя передаваемая степень или пиковая передаваемая степень, заданная как скаляр.
|
Pulse Width (по умолчанию) или Duty Cycle | Ширина радарного импульса или коэффициент заполнения радара, заданный как скаляр.
|
PRF (по умолчанию) или PRI | Частота повторения импульсов (PRF) или интервал повторения импульсов (PRI), заданная в виде скаляра.
|
Hardware - Настройки шумаИспользуйте эти параметры, чтобы задать настройки шума, такие как температура шума или динамическая область значений.
| Параметр | Описание |
|---|---|
Noise Temperature или Noise Figure | Температура шума в системе или рисунок, заданная как скаляр.
|
| Reference Noise Temperature | Эталонная температура шума, заданная в виде скаляра в K. |
| Quantization Noise | Выберите Quantization Noise, чтобы включить шум квантования. |
| Number of Bits | Количество бит в аналого-цифровом (A/D) преобразователе, заданное как безразмерный скаляр. Этот параметр применяется только в том случае, если выбран Quantization Noise. |
| Dynamic Range | Динамическая область значений A/D конвертера, заданный как скаляр в Этот параметр применяется только в том случае, если выбран Quantization Noise. |
Antenna and Scanning - Положение, ширина луча и настройки усиленияИспользуйте эти параметры, чтобы задать положение, ширину луча и настройки усиления, такие как высота антенны, поляризация антенны или азимутальная ширина луча.
| Параметр | Описание |
|---|---|
| Antenna Height | Высота антенны над поверхностью, заданная как скаляр в Этот параметр применяется как к передающей антенне, так и к приемной антенне. |
| Antenna Tilt Angle | Угол между электрической осью антенны и плоскостью земли, заданный как скаляр в Этот параметр применяется как к передающей антенне, так и к приемной антенне. |
| Antenna Polarization | Задайте поляризацию антенны следующим Этот параметр применяется как к передающей антенне, так и к приемной антенне. |
Transmit Antenna Gain Input - Коэффициент усиления передающей антенныЗадайте Transmit Antenna Gain Input как одно из следующего:
Manual - Используйте поле Gain, чтобы ввести пользовательское значение для передающей антенны в dBi.
From Beamwidth - Вычислите коэффициент усиления передающей антенны из ширины луча, принимая идеальный Гауссов диаграммы направленности без боковых элементов. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Azimuth Beamwidth | Азимутальная лучевая ширина передающей антенны, заданная в виде скаляра в deg, rad, или mrad. |
| Elevation Beamwidth | Лучевая ширина передающей антенны, заданная в виде скаляра в deg, rad, или mrad. |
Radar Designer вычисляет и отображает коэффициент усиления приемной антенны в дБи.
Receive Antenna Gain Input - Коэффициент усиления приемной антенны, если отличается от передающей антенныВыберите Use Different Antenna for Receive, чтобы указать, что приемная и передающая антенны имеют различные усиления. Если вы используете другую антенну для приема, можно задать Receive Antenna Gain Input как одно из следующего:
Manual - Используйте поле Gain, чтобы ввести пользовательское значение для приемной антенны в dBi.
From Beamwidth - Вычислите коэффициент усиления приемной антенны из ширины луча, принимая идеальный Гауссов диаграммы направленности без боковых элементов. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Azimuth Beamwidth | Азимутальная лучевая ширина приемной антенны, заданная в виде скаляра в deg, rad, или mrad. |
| Elevation Beamwidth | Повышение луча приемной антенны, заданная в виде скаляра в deg, rad, или mrad. |
Radar Designer вычисляет и отображает коэффициент усиления приемной антенны в дБи.
Scan Mode - Настройки режима сканаЗадайте режим скана для вашего проекта как один из следующих:
None - Радар не выполняет сканирование. Radar Designer не включает потери, связанные с сканированием, в анализ.
Mechanical - Радар выполняет механическое сканирование. Radar Designer включает потери формы луча и коэффициент плотности луча (зависящие от диапазона потери для быстро сканирующего луча) в анализ.
Electronic - Радар использует фазированную решетку для выполнения электронного сканирования. Radar Designer включает потери формы луча и потери сектора скана в анализ.
Если вы задаете Scan Mode как Mechanical или Electronicможно задать эти параметры.
| Параметр | Описание |
|---|---|
| Azimuth Scan Sector Size | Азимутальный диапазон поискового объема, заданный в виде скаляра в deg, rad, или mrad. |
| Elevation Scan Limits | Начальные и конечные повышения объема скана, заданные как два скаляра в deg, rad, или mrad. |
На основе выбранных параметров Radar Designer вычисляет и отображает следующие настройки:
Max Scan Rate максимальная скорость скана в степенях в секунду, заданная выбранной PRF, количество переданных импульсов и ширина луча антенны. Эта настройка отображается, если Scan Mode задан как Mechanical.
Search Volume Size, размер твердого углового объема поиска у стерадиан.
Search Time, время в секундах, необходимое для сканирования объема поиска, учитывая выбранный PRF, количество переданных импульсов и ширину луча антенны.
Detection and Tracking - P fa, CPI и M -of- N настройкиИспользуйте эти параметры, чтобы задать P fa, CPI и M -of- N настройки, такие как вероятность ложного предупреждения или логического порога подтверждения дорожки.
| Параметр | Описание |
|---|---|
| Probability of False Alarm | Желаемая вероятность ложного предупреждения (P fa) на выходе детектора, заданная как безразмерный скаляр. Значение по умолчанию является 10–6 ( |
| Number of Pulses | Количество импульсов в когерентном интервале обработки (CPI), заданное как положительный целочисленный скаляр. |
| Pulse Integration | Импульсное интегрирование, заданное как |
Moving Target Indicator (MTI) - Движущийся целевой индикаторВыберите Moving Target Indicator (MTI), чтобы включить обработку индикатора скользящего целевого устройства в проект. Если вы включите обработку целевого индикатора, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Canceler | Canceler, указанный как один из следующих:
|
| Null Velocity | Скорость загромождения, до которой регулируется фильтр MTI, заданная как скаляр в m/s, km/hr, mi/hr, или kts. |
| Method | Метод для выполнения обработки MTI, заданный как одно из следующего:
|
| Quadrature Processing | Выберите Quadrature Processing, чтобы включить обработку MTI квадратурного канала (вектора) для вашего проекта. Если этот параметр не выбран, Radar Designer выполняет одноканальную обработку MTI. |
Эта опция доступна, если Pulse Integration задано значение Noncoherent.
Binary Pulse Integration - Двоичное интегрирование импульсовЗадайте, как выполнить двоичное (M -of- N) интегрирование импульсов как одно из следующего:
None - Radar Designer не применяет двоичное интегрирование.
Automatic - Radar Designer применяет двоичное интегрирование и вычисляет оптимальное количество обнаруженных импульсов (M) из общего количества импульсов (N).
Custom - Radar Designer применяет двоичное интегрирование с вручную заданным количеством обнаруженных импульсов. Если вы выбираете эту опцию, задайте Number of Detected Pulses (M) из общего количества импульсов (N) как положительное целое число.
Эта опция доступна, если Pulse Integration задано значение Noncoherent.
Constant False Alarm Rate (CFAR) - Включите постоянное обнаружение частоты ложных предупрежденийВыберите Constant False Alarm Rate (CFAR), чтобы включить обнаружение постоянной частоты ложных предупреждений (CFAR). Если вы включите обнаружение CFAR, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Number of Reference Cells | Общее количество CFAR-ссылочных (обучающих) камер, заданное в виде положительного целочисленного скаляра. |
| Method | Метод обнаружения CFAR, заданный как один из следующих:
|
Number of CPIs - Количество когерентных интервалов обработкиЗадайте количество когерентных интервалов обработки (CPI) как положительный целочисленный скаляр.
M-of-N CPI Integration - Включите M -of- N интегрирование ИПЦВыберите M-of-N CPI Integration, чтобы включить M -of- N интегрирование интервалов когерентной обработки (ИПЦ). Если вы включите M -of- N интегрирование ИПЦ, можно задать этот параметр.
| Параметр | Описание |
|---|---|
| Number of CPIs with Detection | Количество когерентных интервалов обработки с объявленным обнаружением (M) из общего количества ИПЦ (N), заданное как безразмерный скаляр. |
Sensitivity Time Control (STC) - Контроль времени чувствительностиВыберите Sensitivity Time Control, чтобы включить управление временем чувствительности в проекте. Если вы включите управление временем чувствительности, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Cutoff Range | Отсечка области значений, за которой используется полное усиление приемника, заданная как скаляр в m, km, nmi, ft, или kft. По умолчанию: 50 км. |
| Exponent | Экспонента, выбранная для поддержания обнаруживаемости цели для областей значений внутри области значений отсечения. Значение по умолчанию: 3.5. |
Track Confirmation Logic - Отслеживайте вероятности подтвержденияИспользуйте Алгоритм Общей Истории Ворот, чтобы вычислить вероятности подтверждения трека. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Confirmation Threshold | Порог подтверждения, заданный как два положительных целочисленных скаляров, которые представляют M -of- N или M/ N логику подтверждения. По умолчанию: 2/3. |
Update Rate или Update Time | Частота обновления или время обновления:
По умолчанию: 1 Гц или 1 с. |
Loss Factors - Факторы потерьИспользуйте эти параметры для определения коэффициентов потерь.
| Параметр | Описание |
|---|---|
| Eclipsing | Затменные потери, заданные как None (по умолчанию), Range-Dependent Factor, или Statistical Loss. |
| Custom Loss | Пользовательские потери, заданные как скаляр в dB или linear модулей. По умолчанию: 4 дБ. |
Target - Целевые характеристикиЧтобы включить параметры Target, добавьте по крайней мере один радар к приложению.
| Параметр | Описание |
|---|---|
| Radar Cross Section | Радарное сечение, заданное как скаляр в m2 или dBsm. |
| Swerling Model | Модель Swerling, заданная как Swerling 0/5, Swerling 1, Swerling 2, Swerling 3, или Swerling 4. |
Height или Elevation Angle | Высота или угол возвышения, заданный как скаляр.
|
| Max Acceleration | Максимальное ускорение, заданное как скаляр в m2 или в единицах g. |
Environment - Ландшафт и осадкиИспользуйте вкладку Environment, чтобы включить эффекты из-за кривизны Земли, атмосферы, местности и осадков.
Atmosphere and Surface - Характеристики атмосферы и поверхностиЗадайте характеристики атмосферы и поверхности, чтобы использовать сезонные модели широты, настройки поверхности и поверхностного загромождения.
По умолчанию. Radar Designer параметр Free Space. Эта опция соответствует распространению в вакууме, и единственная переменная, которой вы можете управлять, это Precipitation. Для доступа к другим опциям снимите флажок.
Earth Model - Модель ЗемлиЗадайте Earth Model следующим Curved или Flat. Использование изогнутой модели Земли дает доступ к большему количеству моделей атмосферы и позволяет вам управлять Effective Earth Radius.
Atmosphere Model - Тип атмосферыУкажите тип атмосферы, через которую распространяется радиолокационный сигнал, как No Atmosphere, Uniform, Standard, Low Latitude, Mid Latitude, или High Latitude.
No Atmosphere - Нет атмосферыЗадайте No Atmosphere для использования постоянного индекса преломления 1. Эта модель не включает потери атмосферного газа или эффекта линзы.
Uniform - Равномерная атмосфераЗадайте Uniform для атмосферы с равномерной температурой, давлением и плотностью водяного пара. Эта модель может включать потери атмосферного газа, но не потери эффекта линзы. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Ambient Temperature | Температура равномерной атмосферы, заданная в виде скаляра в C или K. По умолчанию: 15 ° C. |
| Dry Air Pressure | Давление сухого воздуха равномерной атмосферы, заданное как скаляр в hPa, Pa, или mbar. По умолчанию: 1013 hPa. |
| Water Vapor Density | Плотность водяного пара равномерной атмосферы, заданная в виде скаляра в г/м3 или г/см3. По умолчанию: 7,5 г/м3. |
| Include Atmospheric Gases Loss | Выберите для включения потерь пути из-за атмосферного газообразного поглощения. |
Standard - Средняя годовая глобальная эталонная атмосфера МСЭУкажите Standard, чтобы использовать среднегодовую глобальную эталонную атмосферу (MAGRA) МСЭ, рекомендованную в P.835-6 ITU-R [1]. Эта опция применяется только, если Earth Model задан как Curved. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Water Vapor Density Profile | Профиль плотности водяного пара, заданный как Automatic или Custom. Используйте этот параметр для использования настроек, рекомендуемых в ITU-R P.835-6 или для использования собственных настроек плотности водяного пара и высоты шкалы. |
| Surface Water Vapor Density | Плотность поверхностных паров воды в виде скаляра в Этот параметр применяется только, если Water Vapor Density Profile задан как |
| Scale Height | Высота шкалы, заданная в виде скаляра в Этот параметр применяется только, если Water Vapor Density Profile задан как |
| Include Atmospheric Gases Loss | Выберите для включения потерь пути из-за атмосферного газообразного поглощения. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменения индекса преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
Low Latitude - Модель атмосферы МСЭ для широт менее 22 степенейУкажите Low Latitude использования модели атмосферы МСЭ для широт менее 22 °, рекомендованных в P.835-6 ITU-R [1]. Эта опция применяется только, если Earth Model задан как Curved. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Include Atmospheric Gases Loss | Выберите для включения потерь пути из-за атмосферного газообразного поглощения. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменения индекса преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
Mid Latitude - модель атмосферы МСЭ для широт от 22 степеней до 45 степенейУкажите Mid Latitude использования модели атмосферы МСЭ для широт от 22 ° до 45 °, рекомендуемых в P.835-6 МСЭ-Р [1]. Эта опция применяется только, если Earth Model задан как Curved. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Season | Сезон, заданный как Summer или Winter. |
| Include Atmospheric Gases Loss | Выберите для включения потерь пути из-за атмосферного газообразного поглощения. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменения индекса преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
High Latitude - модель атмосферы МСЭ для широт более 45 степенейУкажите High Latitude, чтобы использовать модель атмосферы ITU для широт, превышающих 45 °, рекомендуемых в P.835-6 ITU-R [1]. Эта опция применяется только, если Earth Model задан как Curved. Можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Season | Сезон, заданный как Summer или Winter. |
| Include Atmospheric Gases Loss | Выберите для включения потерь пути из-за атмосферного газообразного поглощения. |
| Include Lens Effect Loss | Выберите, чтобы включить потерю эффекта линзы из-за изменения индекса преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
Effective Earth Radius - Эффективный радиус ЗемлиЗадайте Effective Earth Radius как одно из следующего:
Automatic - Radar Designer вычисляет радиус автоматически на основе эталонной атмосферы.
| Atmosphere Model | Эффективный радиус Земли |
|---|---|
No Atmosphere | 6371 км |
Uniform | 6371 км |
Standard | 8719 км |
Low Latitude | 9540 км |
Mid Latitude | 8262 км |
High Latitude | 8308 км |
Custom - Эта опция рекомендуется для высотных геометрий. Задайте эффективный радиус Земли как скаляр в m, km, nmi, ft, или kft. Этот параметр часто устанавливается на 4/3 фактического радиуса Земли.
Surface Type - Тип поверхностиУкажите тип поверхности, на которой распространяется радиолокационный сигнал, как Featureless, Sea, Land, или Custom.
Featureless - Характеристики идеально гладкой, идеально отражающей поверхностиЕсли вы задаете Surface Type следующим Featurelessможно задать параметр Propagation Factor, который доступен только при установке Earth Model на Curved. Propagation Factor off по умолчанию.
Sea - Характеристики моряЕсли вы задаете Surface Type следующим Seaможно задать эти параметры.
| Параметр | Описание |
|---|---|
| Sea State Number | Номер состояния моря, указанный как одно из следующего:
|
| Include Radar Propagation Factor | Коэффициент распространения радара - это отношение величины фактического магнитного поля в точке пространства к величине магнитного поля в той же точке свободного пространства. Этот параметр доступен, только если вы задаете Earth Model |
| Permittivity Model | Модель диэлектрической проницаемости, заданная в качестве одного из следующих:
Этот параметр применяется только в том случае, если выбран Include Radar Propagation Factor. |
Land - Характеристики землиЕсли вы задаете Surface Type следующим Seaможно задать эти параметры.
| Land Type | Тип земли, указанный в качестве одного из следующих:
|
| Include Radar Propagation Factor | Коэффициент распространения радара - это отношение величины фактического магнитного поля в точке пространства к величине магнитного поля в той же точке свободного пространства. Этот параметр доступен, только если вы задаете Earth Model |
| Vegetation Type | Тип растительности, указанный в качестве одного из следующих:
Этот параметр применяется только в том случае, если выбран Include Radar Propagation Factor. |
| Permittivity Model | Модель диэлектрической проницаемости, заданная в качестве одного из следующих:
Этот параметр применяется только в том случае, если выбран Include Radar Propagation Factor. |
Custom - Пользовательская поверхностьЕсли вы задаете Surface Type следующим Customможно задать эти параметры.
| Параметр | Описание |
|---|---|
| Height Standard Deviation | Стандартное отклонение высоты поверхности, заданное как скаляр в m, km, nmi, ft, или kft. |
| Include Radar Propagation Factor | Коэффициент распространения радара - это отношение величины фактического магнитного поля в точке пространства к величине магнитного поля в той же точке свободного пространства. Этот параметр доступен, только если вы задаете Earth Model |
| Slope | Уклон поверхности, заданный как скаляр в Этот параметр применяется только в том случае, если выбран Include Radar Propagation Factor. |
| Permittivity | Поверхностная диэлектрическая проницаемость, заданная в виде комплексного скаляра в F/m. По умолчанию: (28,5 - j 11,5) F/m. |
Свойства Custom
Surface Type не имеют зависимости от частоты.
Clutter Properties - Характеристики загроможденияМожно задать эти свойства загромождения.
| Параметр | Описание |
|---|---|
| Gamma | Поверхностный параметр гамма (γ), заданный как скаляр в Значение γ для системы, работающей на частотной f, γ = <reservedrangesplaceholder2> 0 + 5 log10 (f / <reservedrangesplaceholder0> 0), где γ 0 - значение γ в f 0 = 10 ГГц и определяется измерением. Этот параметр применяется только, если Surface Type задан как |
| Clutter Velocity Specification | Скорость загромождения, заданная как одно из следующего:
Этот параметр применяется только, если Surface Type задан как |
| Polarization Dependence | Поляризационная зависимость, заданная как Этот параметр применяется только, если Surface Type задан как |
| Clutter Velocity | Скорость загромождения, заданная как скаляр в Этот параметр применяется только, если Polarization Dependence задан как |
| H-pol Clutter Velocity | Скорость загромождения для горизонтальной поляризации, заданная в виде скаляра в Этот параметр применяется только, если Polarization Dependence задан как |
| V-pol Clutter Velocity | Скорость загромождения для вертикальной поляризации, заданная в виде скаляра в Этот параметр применяется только, если Polarization Dependence задан как |
| Clutter Velocity Standard Deviation | Стандартное отклонение скорости загромождения (разброс скорости загромождения), заданное как скаляр в m/s, km/hr, mi/hr, или kts. |
Precipitation - Характеристики осадковЗадайте Precipitation Type во время распространения радиолокационного сигнала следующим None, Rain, Snow, Fog, или Clouds использовать модели дождя, снега, тумана и облака с настройками области значений.
Rain - Характеристики дождяЕсли вы задаете Precipitation Type следующим Rainможно задать эти параметры.
| Параметр | Описание |
|---|---|
| Model | Модель дождя, заданная как одно из следующего:
|
| Precipitation Start Range | Начальная область значений закрашенной фигуры для осаждения, заданный как скаляр в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Область значений закрашенной фигуры осадков, заданная как положительная скалярная величина в m, km, nmi, ft, или kft. |
| Rain Rate | Долгосрочная статистическая скорость дождя, заданная в виде скаляра в мм/ч. |
| Statistical Percentage | Статистический процент, заданный как безразмерный скаляр не меньше 0,001 и не больше 1. Этот параметр возвращает ослабление для заданного процента времени и применяется только, если Model задано как ITU. |
Snow - Характеристики снегаЕсли вы задаете Precipitation Type следующим Snowможно задать эти параметры.
| Параметр | Описание |
|---|---|
| Precipitation Start Range | Начальная область значений закрашенной фигуры для осаждения, заданный как скаляр в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Область значений закрашенной фигуры осадков, заданная как положительная скалярная величина в m, km, nmi, ft, или kft. |
| Snow Rate | Скорость снега, заданная как:
|
| Liquid Water Content | Содержимое жидкой воды в виде скаляра в мм/ч. Этот параметр применяется только, если Snow Rate задан как Custom. Умеренная скорость снега от 1 мм/ч до 2,5 мм/ч. |
Radar Designer использует модель Gunn-East [3], чтобы вычислить потери снега.
Fog - Характеристики туманаЕсли вы задаете Precipitation Type следующим Fogможно задать эти параметры.
| Параметр | Описание |
|---|---|
| Precipitation Start Range | Начальная область значений закрашенной фигуры для осаждения, заданный как скаляр в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Область значений закрашенной фигуры осадков, заданная как положительная скалярная величина в m, km, nmi, ft, или kft. |
| Temperature | Температура окружающей среды тумана, заданная в виде скаляра в C или K. |
| Fog Density | Плотность противотуманной воды, указанная одна из следующих:
|
| Liquid Water Density | Плотность жидкой воды, заданная в виде скаляра в г/м3 или г/см3. Этот параметр применяется только, если Fog Density задан как Custom. |
Radar Designer использует модель тумана/облака ITU из P.840-6 ITU-R. Модель не рекомендуется для распространения наклонного пути.
Clouds - Характеристики облакаЕсли вы задаете Precipitation Type следующим Cloudsможно задать эти параметры.
| Параметр | Описание |
|---|---|
| Precipitation Start Range | Начальная область значений закрашенной фигуры для осаждения, заданный как скаляр в m, km, nmi, ft, или kft. |
| Precipitation Range Extent | Область значений закрашенной фигуры осадков, заданная как положительная скалярная величина в m, km, nmi, ft, или kft. |
| Cloud Type | Тип облаков, указанный как одно из следующего:
|
| Liquid Water Density | Плотность жидкой воды, заданная в виде скаляра в г/м3 или г/см3. Этот параметр применяется только, если Fog Density задан как Custom. |
Radar Designer использует модель тумана/облака ITU из P.840-6 ITU-R. Модель не рекомендуется для распространения наклонного пути.
Metric - Решение основного уравнения радиолокации и ограничениеЗадайте количество, для которого необходимо решить основное уравнение радиолокации, и количество, для сохранения фиксированного при решении.
Probability of Detection
- Вычисляет![]() вероятность обнаружения (P d) и других метрик с ограничением максимальной области значений. Задайте максимальную область значений в виде скаляра в m
вероятность обнаружения (P d) и других метрик с ограничением максимальной области значений. Задайте максимальную область значений в виде скаляра в m, km, nmi, ft, или kft.
Maximum Range
- Вычислите![]() максимальную область значений и другие метрики с ограничением вероятности обнаружения (P d). Задайте вероятность обнаружения как скаляр в десятичных модулях.
максимальную область значений и другие метрики с ограничением вероятности обнаружения (P d). Задайте вероятность обнаружения как скаляр в десятичных модулях.
Выбранное ограничение появится в верхней части таблицы на вкладке Metrics and Requirements.
Metrics and Requirements - Радиолокационные конструктивные ограниченияИспользуйте вкладку Metrics and Requirements, чтобы настроить и изменить метрики, необходимые для сравнительного анализа, чтобы получить желаемую эффективность и удовлетворить требования к проектированию радара. Вкладка использует ту же расцветку, что и График Stoplight, и показывает метрики в таблице.
| Метрика | Описание |
|---|---|
| Probability of Detection | Вероятность обнаружения, заданная как безразмерный скаляр. Это первая запись в таблице, если вы задаете Учитывая максимальную область значений R заданную в SNRav (R max) = Dx (P d, P fa, N, SW), где SNRav - отношение доступного сигнала к шуму, Dx является эффективным Фактором Обнаруживаемости, P fa - выбранная вероятность ложного предупреждения, N - количество принятых импульсов, а SW - модель сигнала Swerling. |
| Max Range | Максимальная область значений, заданный в виде скаляра в Учитывая желаемую вероятность обнаружения P d, заданную в SNRav (R max) = Dx (P d, P fa, N, SW), где SNRav - отношение доступного сигнала к шуму, Dx является эффективным Фактором Обнаруживаемости, P fa - выбранная вероятность ложного предупреждения, N - количество принятых импульсов, а SW - модель сигнала Swerling. |
| Min Detectable Signal | Минимальный обнаруживаемый сигнал, заданный как скаляр в Минимальный обнаруживаемый сигнал вычисляется с помощью MDS = k T s B Dx, где k - константа Больцмана, T s - температура шума системы, B - полоса пропускания, а Dx - коэффициент обнаруживаемости. |
| Min Range | Минимальная область значений, заданный в виде скаляра в Минимальная область значений вычисляется с помощью R min = c τ/2, где c - скорость света, а τ - длительность импульса. |
| Unambiguous Range | Однозначная область значений, заданный как скаляр в Однозначная область значений вычисляется с помощью R ua = c × PRI/2 = c/( 2 × PRF), где c - скорость света, PRI - интервал повторения импульса, а PRF - частота повторения импульса. |
| Range Resolution | Разрешение в области значений, заданное в виде скаляра в Разрешение области значений вычисляется с помощью <reservedrangesplaceholder3> <reservedrangesplaceholder2> = c / (2 × <reservedrangesplaceholder0>), где c - скорость света, а B - ширина полосы пропускания импульса. |
| First Blind Speed | Первая слепая скорость, заданная как скаляр в м/с. Максимальная однозначная радиальная скорость (однозначный Доплер) вычисляется с помощью V rmax = λ × PRF/4, где λ - длина волны радара, а PRF - частота повторения импульса. |
| Range Rate Resolution | Разрешение скорости области значений, заданное как скаляр в м/с. Разрешение скорости области значений вычисляется с помощью δ V r = λ × PRF/( 2 N), где λ - длина волны радара, PRF - частота повторения импульса, и N - количество принятых импульсов. |
| Range Accuracy | Точность области значений, заданная в виде скаляра в Точность области значений для линейного импульса с частотной модуляцией (LFM) вычисляется с помощью где c - скорость света, ОСШ - доступное отношение сигнал/шум, B - полоса ширины полосы пропускания импульса и b r2 - смещение области значений. |
| Azimuth Accuracy | Точность азимута, заданная как скаляр в Точность азимута для однородного линейного массива M-element (ULA) вычисляется с помощью где θ e - азимутальная лучевая ширина, ОСШ - доступное отношение сигнал/шум, k - коэффициент луча (k = 0,89 для ULA), и b θ - смещение азимута. |
| Elevation Accuracy | Точность повышения, заданная в виде скаляра в Точность по высоте для однородного линейного массива M-element (ULA) вычисляется с помощью где θ e - повышение ширина луча, ОСШ - доступное отношение сигнал/шум, k - коэффициент луча (k = 0,89 для ULA), и b θ является повышением смещением. |
| Range Rate Accuracy | Точность скорости области значений, заданная как скаляр в м/с. Точность скорости области значений для импульсов N, когерентно обработанных в течение когерентного интервала обработки, вычисляется с помощью где PRF - частота повторения импульса, λ - длина волны радара, ОСШ - доступное отношение сигнал/шум, B - полоса ширины полосы пропускания импульса, и b rr - смещение скорости области значений. |
| Probability of True Track | Вероятность истинной дорожки, заданная как безразмерный скаляр. Вероятность истинной дорожки вычисляется с помощью общего алгоритма истории ворот. Для получения дополнительной информации см. |
| Probability of False Track | Вероятность ложного дорожки, заданная как безразмерный скаляр. Вероятность ложной дорожки вычисляется с помощью общего алгоритма истории ворот. Для получения дополнительной информации см. |
| Effective Isotropic Radiated Power | Эффективная изотропная излучаемая степень, заданная как скаляр в Эффективная излученная степень вычисляется с помощью ERP = P t G tx, где P t - пиковая передаваемая степень, а G tx - коэффициент усиления антенны передатчика. |
| Power-Aperture Product | Продукт с апертурой мощности, заданное как скаляр в |
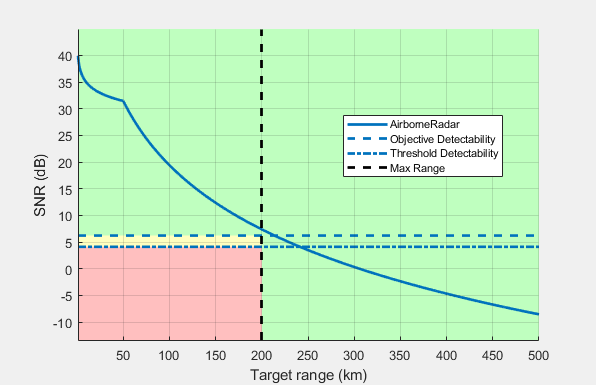
SNR vs Range - Доступная визуализация отношения сигнал/шумДля каждого сеанса проекта радара Radar Designer отображает отношение доступного сигнала к шуму (ОСШ) на входе приемника как функцию целевой области значений. График показывает требования к максимальной области значений и график стоплайта на основе значений фактора обнаруживаемости (необходимого ОСШ).
Этот график показывает график отношения сигнал/шум для одного радара воздушного базирования с настройками по умолчанию. Для получения дополнительной информации см. раздел « Строения Radar Designer».
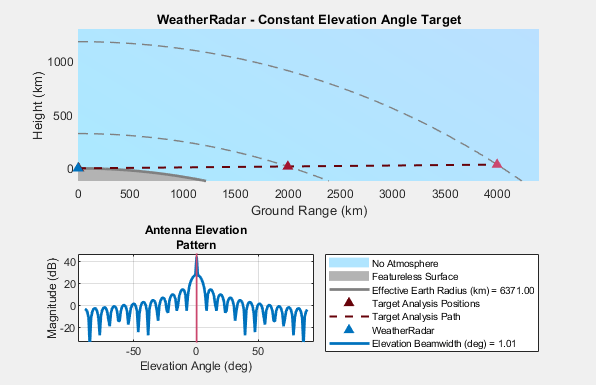
Scenario Geometry - Геометрическая и экологическая визуализацияДля каждого сеанса проекта радара Radar Designer отображает вкладку Scenario Geometry, которая показывает эту информацию:
Окружение (изогнутая Земля, плоская Земля, свободное пространство)
Высота радиолокационной антенны
Высота и положение цели в различных областях значений (постоянное повышение или постоянная высота)
Радиолокационная антенна шаблона, демонстрирующая приложенный угол наклона
Этот график показывает график геометрии сценария для одного метеорологического радара с настройками по умолчанию на изогнутой Земле. Для получения дополнительной информации см. раздел « Строения Radar Designer».
Analysis - Диапазон/Допплер, обнаруживаемость и другие графикиЗадайте графики, которые будут использоваться для визуализации и анализа вашего проекта радара.
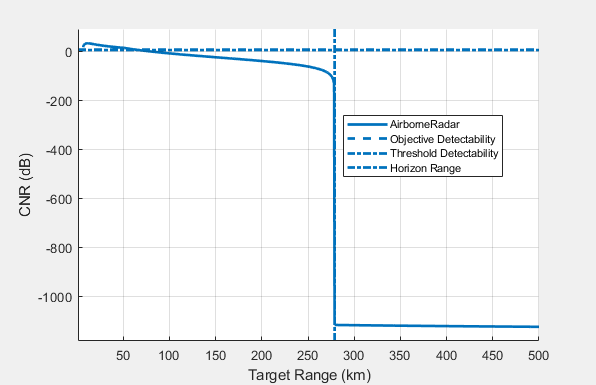
CNR vs Range
- Представление![]() отношения загромождения к шуму в зависимости от области значений для всех проектов
отношения загромождения к шуму в зависимости от области значений для всех проектов
Чтобы визуализировать отношение загромождения к шуму (CNR) как функцию области значений для ваших проектов радара, нажмите CNR vs Range на панели инструментов.
Radar Designer отображает значение CNR в дБ и показывает область значений горизонтов.
Этот график показывает график отношения загромождения к шуму для одного радара воздушного базирования с настройками по умолчанию. Для получения дополнительной информации см. раздел « Строения Radar Designer».
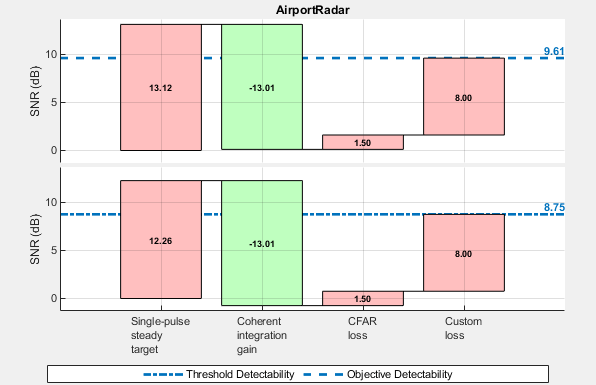
Detectability Factor
- Смотрите усиления![]() и потери выбранного на данный момент радара
и потери выбранного на данный момент радара
Чтобы визуализировать усиления и потери для проектов радара, нажмите Detectability Factor на панели инструментов.
Radar Designer моделирует несколько компонентов цепи обработки радиолокационных сигналов, которые влияют на полученный Коэффициент Обнаруживаемости. Приложение отображает график водопада, которая показывает индивидуальные потери и усиления, которые способствуют увеличению необходимой энергии сигнала.
Потери, представленные красным цветом, увеличивают необходимый порог ОСШ.
Усиления, представленные зеленым цветом, уменьшают необходимый порог ОСШ.
Сканируйте график слева направо, чтобы увидеть, как изменяется коэффициент обнаруживаемости при добавлении этих компонентов:
Устойчивая целевая одноимпульсная обнаруживаемость
Интеграционный коэффициент усиления
Потери колебаний
Двоичная потеря интегрирования
Потери CFAR
Потеря затменности
Потери MTI
Потеря формы балки
Потери сектора скана
Этот график показывает график фактора обнаруживаемости для одного радара аэропорта с настройками по умолчанию. Для получения дополнительной информации см. раздел « Строения Radar Designer».
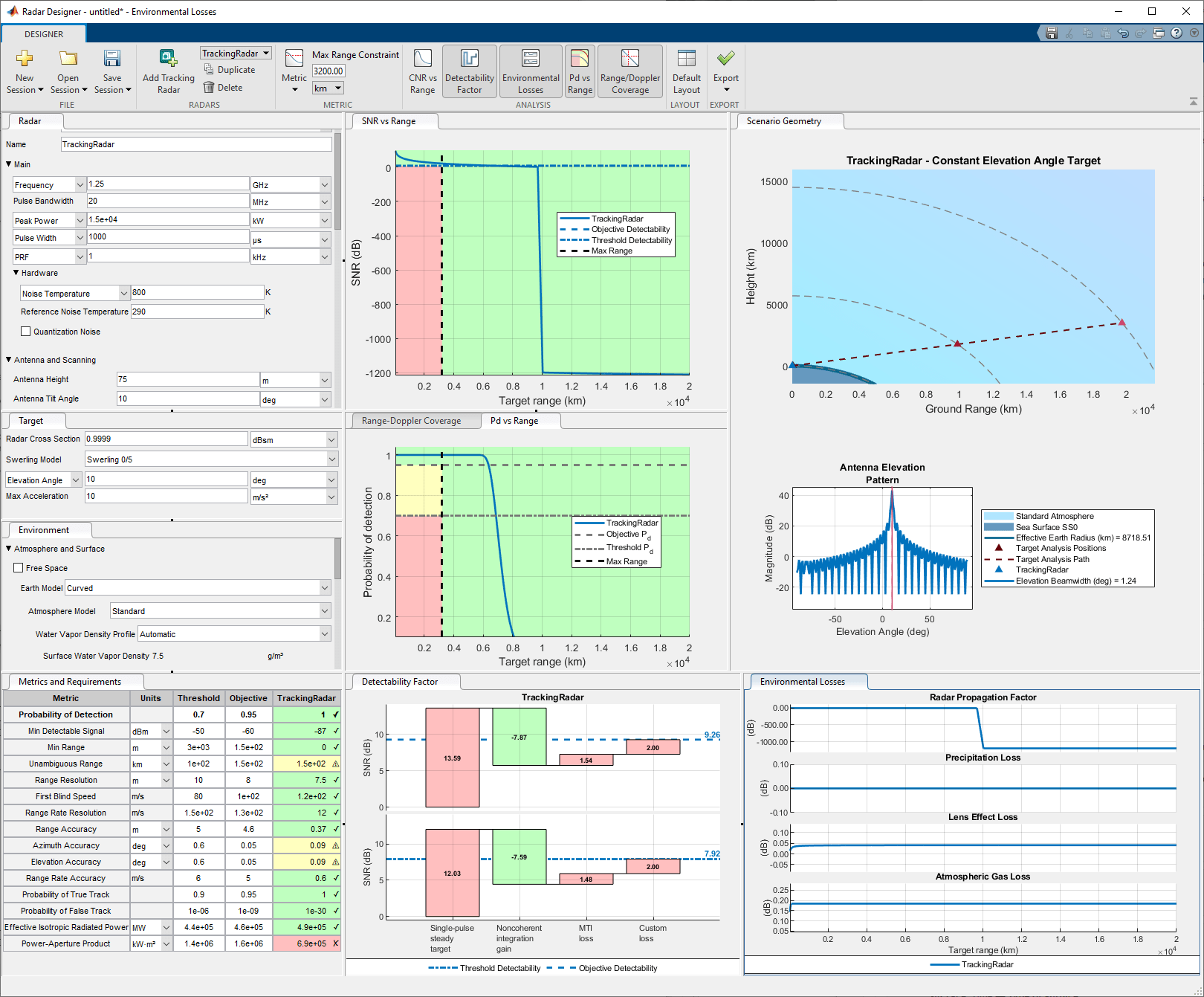
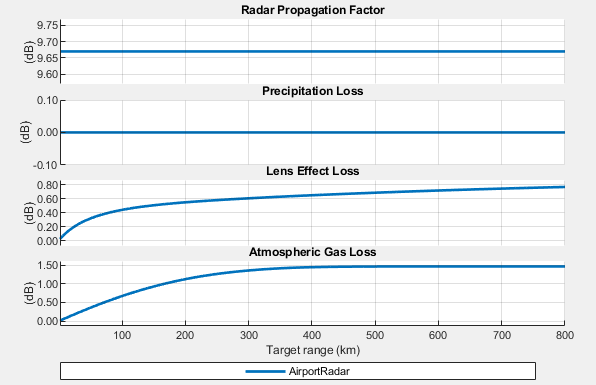
Environmental Losses
- Просмотр![]() экологических потерь для выбранного на данный момент радара
экологических потерь для выбранного на данный момент радара
Чтобы визуализировать зависящие от области значений компоненты потерь для проектов радара в их рабочих окружениях, нажмите Environmental Losses на панели инструментов.
Radar Designer отображает четыре зависящих от области значений компонента потерь, которые соответствуют различным атмосферным эффектам и эффектам распространения:
Потери осадков
Потери атмосферного газа
Потеря линз-эффекта
Коэффициент распространения радара
Этот график показывает график потерь окружающей среды для одного радара аэропорта с настройками по умолчанию с использованием высокоширотной модели атмосферы. Для получения дополнительной информации см. раздел « Строения Radar Designer».
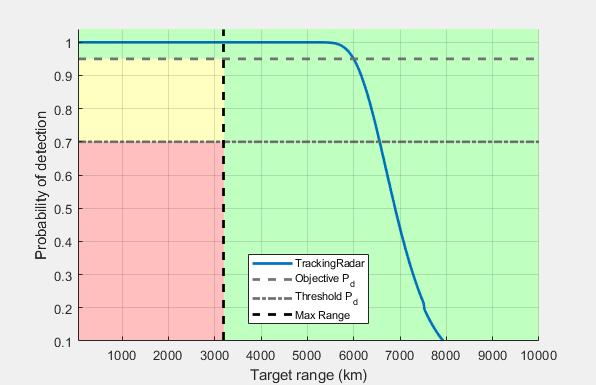
Pd vs Range
- Показать вероятность![]() обнаружения (P d) от области значений для всех проектов
обнаружения (P d) от области значений для всех проектов
Чтобы визуализировать вероятность обнаружения как функцию области значений для ваших проектов радара, нажмите Pd vs Range на панели инструментов.
Radar Designer отображает вероятность обнаружения на выходе приемника (действующий P d) как функцию целевой области значений. Рисунок показывает требования к максимальной области значений и график стоплайта на основе требуемых значений P d.
Этот график показывает вероятность обнаружения от графика области значений для одного радара слежения с настройками по умолчанию. Для получения дополнительной информации см. раздел « Строения Radar Designer».
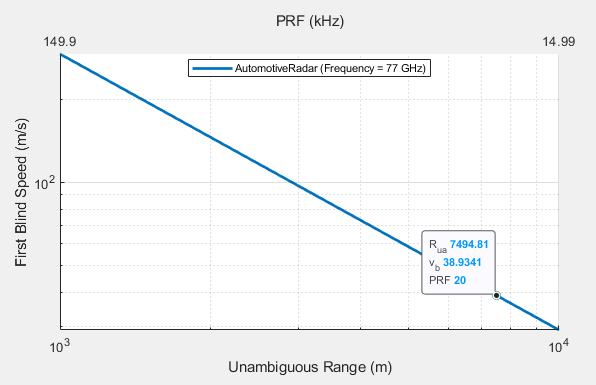
Range/Doppler Coverage
- Исследуйте область значений![]() /Допплеровское пространство для выбранного на данный момент радара
/Допплеровское пространство для выбранного на данный момент радара
Чтобы визуализировать область значений покрытия областей/Доплера без неоднозначности для ваших проектов радара, нажмите Range/Doppler Coverage на панели инструментов.
Radar Designer отображает логарифмический график первой слепой скорости как функции однозначной области значений (нижняя ось X) и PRF (верхняя ось X). Каждая сплошная линия на графике представляет радиолокационный проект. Проекты с различными несущими частотами появляются как параллельные линии.
Этот график показывает график покрытия области значений/Доплера для одного автомобильного радара с настройками по умолчанию. Для получения дополнительной информации см. раздел « Строения Radar Designer».
Radar Designer включает радиолокационные строения, которые позволяют переключаться между проектами радаров, дублировать радары и удалять радары.
В этой таблице показаны значения параметров по умолчанию для встроенных строений.
| Категория | Свойство | Радар | ||||
|---|---|---|---|---|---|---|
| Воздушный радар | Радар аэропорта | Автомобильный радар | Радар слежения | Радар погоды | ||
| Общая информация | Значок | |||||
| Описание | Дальний радар воздушного наблюдения | Наблюдение за аэропортом терминала | Автомобильный радар для использования в таких приложениях, как автоматический круиз-контроль | Наземная кабельная радиолокационная система слежения | Радар чистой воздушной погоды | |
| Вдохновленный | Воздушный сценарий, представленный в [5] | ASR-9 | Bosch LRR3, TI радары | COBRA DANE | NEXRAD (VCP 32) | |
| Главный | Частота | 450 МГц | 2,8 ГГц | 77 ГГц | 1,25 ГГц | 2,8 ГГц |
| Частотные полосы | УВЧ | S | W | L | S | |
| Пропускная способность | 4 МГц | 1,5 МГц | 300 МГц | 20 МГц | 0,5 МГц | |
| Пиковая степень | 200 кВт | 1,1 МВТ | 30 мВт | 15 МВТ | 500 кВт | |
| Ширина импульса | 200 мкс | 1 мкс | 50 мкс | 1 мс | 1,5 мкс | |
| PRF | 300 Гц | 1 кГц | 20 кГц | 1 кГц | 320 Гц | |
| Оборудование | Температура шума | 1500 К (шумовой рисунок 8 дБ при эталонной температуре 290K) | 950 К | 8000 К | 800 К | 450 К |
| Антенна и сканирование | Высота антенны | 6096 м (20 000 футов) | 10 м | 1 м | 75 м | 20 м |
| Наклон антенны | –1° | 0.5° | 0 | 10° | 0.5° | |
| Поляризация | Горизонтальный | Горизонтальный | Горизонтальный | Горизонтальный | Горизонтальный | |
| Выгода | От ширины луча | От ширины луча | От ширины луча | От ширины луча | Руководство | |
| Азимут: 8 ° | Азимут: 1,5 ° | Азимут: 30 ° | Азимут: 1 ° | 45 дБ | ||
| Повышение: 90 ° | Повышение: 5 ° | Повышение: 10 ° | Повышение: 1 ° | |||
| Режим скана | Электронный | Механический | Н/Д | Н/Д | Механический | |
| Азимут ± 30 ° | Полный 360 ° | Объемный скан: Азимут: Полный 360 °. Повышение: от 0,5 ° до 5 ° | ||||
| Время скана | 0,05 с | 5 с | Н/Д | Н/Д | 10 минуты | |
| Обнаружение | Вероятность ложного предупреждения | 10–6 | 10–6 | 10–6 | 10–6 | 10–3 |
| Количество импульсов в ИПЦ | 18 | 20 | 256 | 1 | 64 | |
| Количество ИПЦ | 1 | 1 | 1 | 1 | 1 | |
| Потери и другие входы | Пользовательские потери | 4 дБ | 8 дБ | 2 дБ | 2 дБ | 2 дБ |
| Другие входы | STC- 'on' с параметрами по умолчанию | CFAR- 'on' с параметрами по умолчанию | Н/Д | Н/Д | Н/Д | |
CFAR- 'on' с параметрами по умолчанию | ||||||
MTI- 'on' с параметрами по умолчанию | MTI- 'on' с параметрами по умолчанию | |||||
| Получите коэффициент усиления: 10 дБ | ||||||
Используйте Ctrl+Z, чтобы отменить изменение. Используйте Ctrl+Y для повторного изменения типа «undone».
[1] Рекомендация ITU-R P.835-6 (12/2017). «Эталонные стандартные атмосферы». Женева: Международное объединение электросвязи, 2017, https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.835-6-201712-I!!PDF-E.pdf.
[2] Barton, David K. Radar Equations for Modern Radar. Norwood, MA: Artech House, 2013.
[3] Ганн, К. Л. С., и Т. У. Р. Ист. «Микроволновые Свойства частиц осадков». Ежеквартальный журнал Королевского метеорологического общества 80, № 346 (октябрь 1954): 522-45. https://doi.org/10.1002/qj.49708034603.
[4] O'Donnell, R. M «Радиолокационные Системы Engineering». IEEE AES Society, IEEE New Hampshire Section, Радиолокационные Системы Course, январь 2010.
[5] Ward, J. «Space-Time Adaptive Processing for Airborne Radar». TR-1015, MIT Lincoln Laboratory, декабрь 1994 года. https://apps.dtic.mil/dtic/tr/fulltext/u2/a293032.pdf
[6] Чарльз С. Вассон, Системный инженерный анализ, проект и разработка: Концепции, принципы и практики. John Wiley & Sons, 2015.
