Разложите неопределенные объекты на фиксированные определенные и нормированные неопределенные части
[M,Delta] = lftdata(A); [M,Delta] = lftdata(A,List); [M,Delta,Blkstruct] = lftdata(A); [M,Delta,Blkstruct,Normunc] = lftdata(A);
lftdata разлагает неопределенный объект на фиксированную определенную часть и нормализованную неопределенную часть lftdata. может также частично разложить неопределенный объект на неопределенную часть и нормализованную неопределенную часть. Неопределенные объекты (umat, ufrd, uss) представлены как определенные (т.е. не неопределенные) объекты в обратной связи с блок-диагональными конкатенациями неопределенных элементов.
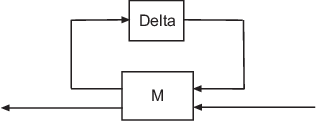
[M,Delta] = lftdata(A) разделяет неопределенный объект A в определенный объект M и нормированную неопределенную матрицу Delta таким образом A равно lft(Delta,M), как показано ниже.
Если A является umat, затем M будет double; если A является uss, затем M будет ss; если A является ufrd, затем M будет frd. Во всех случаях Delta является umat.
[M,Delta] = lftdata(A,List) разделяет неопределенный объект A в неопределенный объект M, в обратной связи с нормализованной неопределенной матрицей Delta. List - камера (или char) массив имен неопределенных элементов A которые составляют Delta. Вся остальная неопределенность в A остается в M.
lftdata(A,fieldnames(A.Uncertainty)) то же, что и lftdata(A).
[M,DELTA,BLKSTRUCT] = lftdata(A) возвращает N массив структур -by-1 BLKSTRUCT, где BLKSTRUCT(i) описывает i-ый нормированный неопределенный элемент. Это описание неопределенности может быть передано непосредственно в низкоуровневую структурированную функцию анализа сингулярных значений mussv.
[M,DELTA,BLKSTRUCT,NORMUNC] = lftdata(A) возвращает массив ячеек NORMUNC нормированных неопределенных элементов. Каждый нормированный элемент имеет 'Normalized' прилагается к его первоначальному имени во избежание путаницы. Обратите внимание, что lft(blkdiag(NORMUNC{:}),M) эквивалентно A. Нормализации для каждого типа неопределенных элементов описаны в разделе «Разложение неопределенных объектов».
