Прежде чем вы сможете импортировать данные, идентифицируете сигналы, которые вы хотите импортировать, и настройте данные для использования с отображением входных портов корневого уровня. См. «Создание данных сигнала для сопоставления корневых входных отображений». Для получения сводных данных других шагов, связанных с использованием инструмента Root Inport Mapper, см. Раздел «Импорт и Отображение рабочего процесса».
В целях импорта данных диалоговые окна Корневой сопоставитель входных портов из MAT-файла и Из рабочей области обеспечивают флажок Convert signals into a scenario dataset and save to MAT-file, установленный по умолчанию. Чтобы преобразовать данные в вашем MAT-файле в Simulink.SimulationData.Dataset установите этот флажок. Кроме того, используйте convertToSLDataset функция для преобразования ваших данных.
Примечание
Инструмент Root Inport Mapper использует термин link для ссылки на акт импорта Simulink® данные. Источники, из которых можно связать данные, находятся в разделе LINK инструмента.
Для импорта данных сигнала для отображения root-inport:
Откройте инструмент Root Inport Mapper. На панели Configuration Parameters > Data Import/Export нажмите Connect Input.
В разделе LINK выберите источник данных.
Чтобы перейти к MAT-файлу или файлу электронной таблицы, содержащему сигналы, которые вы хотите импортировать, выберите From Spreadsheet или From MAT-File и перейдите к MAT-файлу или файлу электронной таблицы. Чтобы вернуться в раздел LINK, нажмите OK.
Примечание
Для импорта данных шины для корневых входных отображений смотрите Import Bus Data.
Чтобы отобразить список базового рабочего пространства переменных, которые можно импортировать, выберите From Workspace. Выберите переменные, которые вы хотите импортировать, и нажмите OK.
В диалоговом окне «Из» отображается содержимое электронной таблицы, файла или базового рабочего пространства.
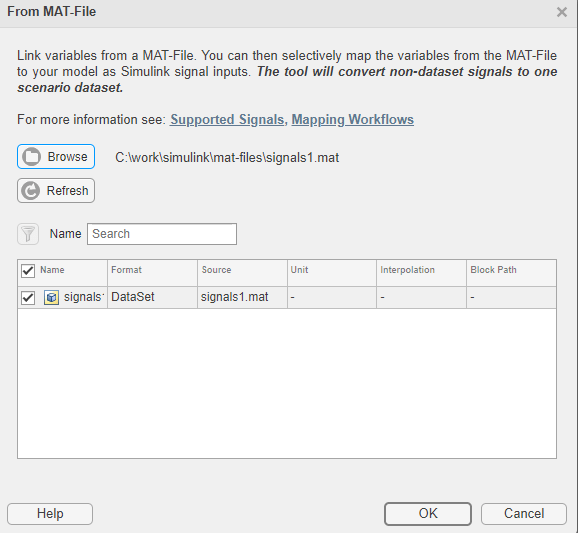
Выберите данные, которые вы хотите импортировать, и нажмите OK.
Инструмент Root Inport Mapper отображает импортированные данные.
Также можно создать данные сигнала для отображения с помощью опции Signals > New MAT-File. Для получения дополнительной информации смотрите Создание и редактирование данных о сигнале.
Используйте объекты шины для данных шины, которые вы хотите импортировать и сопоставить с корневыми входными портами или портами элемента шины.
Сохраните объекты шины в MAT-файле. Используйте другой MAT-файл, содержащий данные шины, которые вы хотите импортировать для объекта шины. Этот файл может быть существующим MAT-файлом, который уже содержит MATLAB®
struct. Можно также создать шину в базовом рабочем пространстве и сохранить ее в MAT-файле. Для получения дополнительной информации, Данные сигнала шины для сопоставления корневых входных отображений.
Чтобы импортировать данные шины, в разделе LINK панели инструментов Root Inport Mapper нажмите From MAT-File. Выберите MAT-файл, содержащий данные шины, и нажмите OK.
Используйте инструмент Root Inport Mapper, чтобы импортировать сигналы из других источников.
Для импорта сигналов из моделей, которые содержат блоки Signal Editor, смотрите Импорт данных из Редактор.
Можно импортировать Excel® данные электронных таблиц. Инструмент Root Inport Mapper импортирует лист как Simulink.SimulationData.Dataset объект, который содержит элементы timeseries.
Для импорта тестовых векторов из Simulink Design Verifier™ смотрите Импорт тестовых векторов из окружения Simulink Design Verifier.
Можно импортировать и сопоставить данные из блока Signal Editor в MAT-файле. Для получения дополнительной информации смотрите Загрузка данных со взаимозаменяемыми сценариями с использованием блока Редактор.
Можно импортировать и сопоставить тестовые векторы Simulink Design Verifier. Для этого рабочего процесса требуется лицензия Simulink Design Verifier.
Перед импортом используйте Simulink Design Verifier
sldvsimdata (Simulink Design Verifier)Simulink.SimulationData.Dataset объект. Этот файл содержит тестовую векторную структуру sldvData. Сохраните выход в MAT-файл и затем импортируйте его в файл Root Inport Mapper.
