Чтобы определить, соответствует ли ваш ПИД-регулятор вашим требованиям, можно проанализировать отклик системы с помощью графиков PID Tuner отклика.
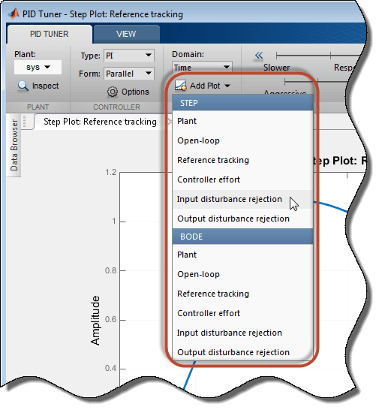
Чтобы определить, соответствует ли проект компенсатора вашим требованиям, можно проанализировать отклик системы с помощью графиков отклика. На вкладке PID Tuner выберите график отклика из меню Add Plot. Меню Add Plot также позволяет вам выбрать из нескольких шаговых графиков (ответ во временной области) или Диаграммы Боде (частотный диапазон ответ).
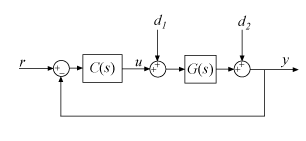
Для 1-DOF типов ПИД-регулятора, таких как PI, PIDF и PDF, программное обеспечение вычисляет отклики системы на основе следующей одноконтурной архитектуры управления, где G является указанным объектом, а C является ПИД-регулятором:
Для 2-DOF типов ПИД-регулятора, таких как PI2, PIDF2 и I-PD, программное обеспечение вычисляет отклики на основе следующей архитектуры:
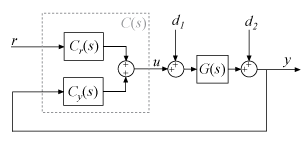
Отклики системы основаны на разложении ПИД-регулятора С 2 СТЕПЕНЯМИ СВОБОДЫ, C, в <reservedrangesplaceholder3> <reservedrangesplaceholder2> компонента заданного значения и <reservedrangesplaceholder1> <reservedrangesplaceholder0> компонента обратной связи, как описано в ПИД-регуляторах с двумя степенями свободы.
В следующей таблице представлены доступные ответы для графиков для анализа.
| Ответ | Построенная система (1-DOF) | Построенная система (2-DOF) | Описание |
|---|---|---|---|
Plant | G | G | Реакция объекта. Используется для исследования динамики объекта. |
Open-loop | GC | –GCy | Ответ системы разомкнутого контура контроллер-установка. Используйте для проекта частотного диапазона. Используйте, когда спецификации проекта включают критерии робастности, такие как разомкнутые контуры запаса по амплитуде и запас по фазе. |
Reference tracking | (от r до y) | (от r до y) | Замкнутый цикл отклика системы с переходом на шаг в уставке. Используйте, когда спецификации проекта включают отслеживание уставки. |
Controller effort | (от r до u) | (от r до u) | Контроллер выход с обратной связью на шаг изменения уставки. Используйте, когда ваш проект ограничен практическими ограничениями, такими как насыщение контроллера. |
Input disturbance rejection | (с d 1 по y) | (с d 1 по y) | Замкнутый отклик системы для загрузки нарушения порядка (шаг, нарушение порядка на входе объекта). Используйте, когда ваши проекты спецификации включают вход подавления помех. |
Output disturbance rejection | (с d 2 по y) | (с d 2 по y) | Замкнутый цикл отклика системы к шагу, нарушению порядка на объект выходе. Используйте, когда вы хотите анализировать чувствительность к ошибкам моделирования. |
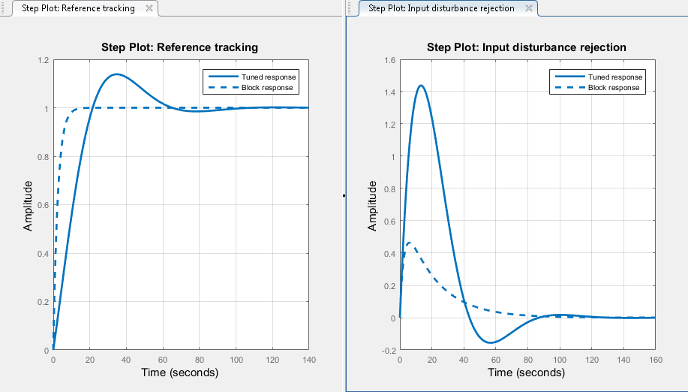
По умолчанию PID Tuner строит графики откликов системы с помощью обоих:
Значения ПИД в блоке контроллера в Simulink® модель (Block response).
Значения коэффициентов ПИД текущего проекта PID Tuner (Tuned response).
Когда вы корректируете текущий проект <reservedrangesplaceholder0>, например, перемещая ползунки, изменяются графики отклика Tuned, в то время как графики отклика блок нет.
Чтобы записать текущий проект PID Tuner в модель Simulink, нажмите. ![]() Когда вы делаете это, текущий ответ Tuned становится ответом блок. Дальнейшая корректировка текущего проекта создает новую линию отклика Tuned.
Когда вы делаете это, текущий ответ Tuned становится ответом блок. Дальнейшая корректировка текущего проекта создает новую линию отклика Tuned.
Чтобы скрыть ответ блок![]() , нажмите Options и снимите флажок Show Block Response.
, нажмите Options и снимите флажок Show Block Response.
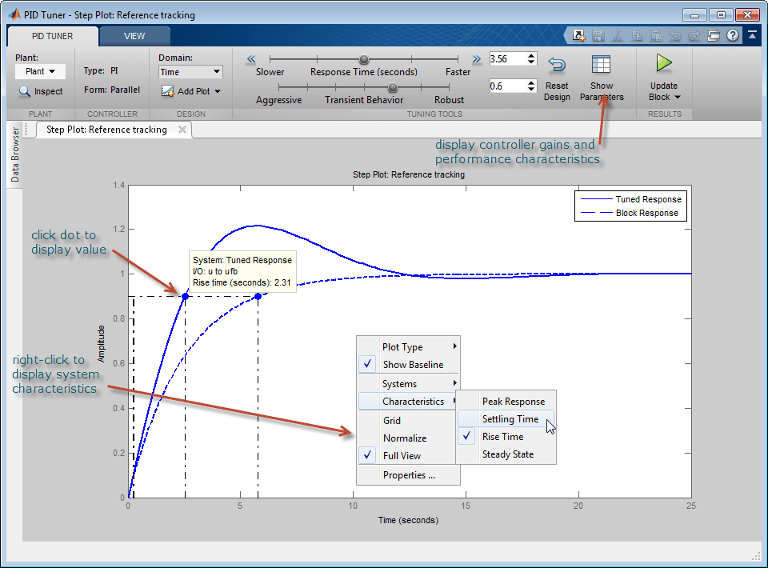
Можно просмотреть значения для характеристик системы, таких как максимальная чувствительность и запас по амплитуде, либо:
Непосредственно на графике отклика - используйте контекстное меню, чтобы добавить характеристики, которые появляются как синие маркеры. Затем щелкните левой кнопкой мыши по маркеру, чтобы отобразить соответствующую панель данных.
В таблице Performance and robustness - Чтобы отобразить эту таблицу, нажмите![]() Show Parameters.
Show Parameters.
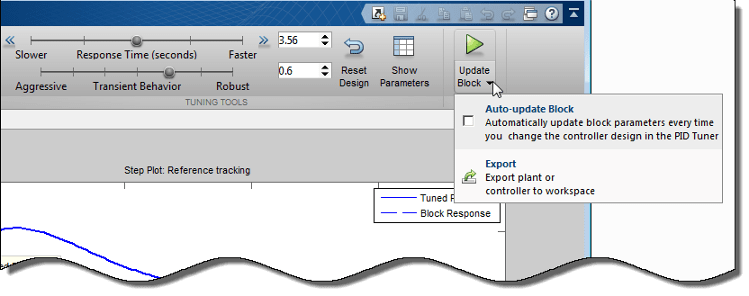
Можно экспортировать линеаризированную модель объекта управления, вычисленную по PID Tuner в MATLAB® рабочая область для последующего анализа. Для этого щелкните Update Block и выберите Export.
В диалоговом окне Экспорт (Export) проверьте модели, которые вы хотите экспортировать. Щелкните OK, чтобы экспортировать объект или контроллер в рабочее пространство MATLAB как пространство состояний (ss) объект модели или pid объект, соответственно.
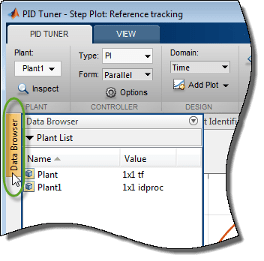
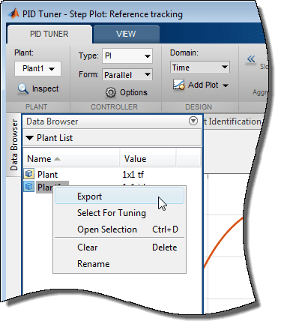
Также можно экспортировать модель с помощью контекстного меню в Data Browser. Для этого перейдите на вкладку Data Browser.
Затем щелкните правой кнопкой мыши модель и выберите Export.
Если реакция первоначального проекта контроллера не соответствует вашим требованиям, можно в интерактивном режиме настроить проект. PID Tuner дает вам два Domain опции доработки проектирования контроллера:
Time область (по умолчанию) - Используйте ползунок Response Time, чтобы сделать реакцию системы управления с обратной связью быстрее или медленнее. Используйте Transient Behavior ползунок, чтобы сделать контроллер более агрессивным при подавлении помех или более устойчивым к неопределенности объекта.
Frequency - Используйте ползунок Bandwidth, чтобы сделать реакцию системы управления с обратной связью быстрее или медленнее (время отклика 2/ wc, где wc - полоса пропускания). Используйте Phase Margin ползунок, чтобы сделать контроллер более агрессивным при подавлении помех или более устойчивым к неопределенности объекта.
В обоих режимах существует компромисс между отслеживанием уставки и подавления помех эффективности. Пример, показывающий, как использовать ползунки для корректировки этого компромисса, см. в разделе Настройка ПИД-регуляторе для Отслеживания уставки или Подавления помех Favor.
Когда вы найдете проект компенсатора, которая соответствует вашим требованиям, проверьте, что она ведет себя подобным образом в нелинейной модели Simulink. Для получения инструкций смотрите Проверьте проект ПИД в вашей модели Simulink.
Совет
Чтобы вернуться к первоначальному проекту контроллера после перемещения ползунков,![]() нажмите Reset Design.
нажмите Reset Design.
