В PID Tuner вы настраиваете компенсатор, используя линейную модель своего объекта. Во-первых, вы находите хороший проект компенсатора в PID Tuner. Затем проверьте, что настроенный контроллер соответствует вашим проектом требованиям при применении к нелинейному объекту в Simulink® модель.
Чтобы проверить проект компенсатора в нелинейной модели Simulink:
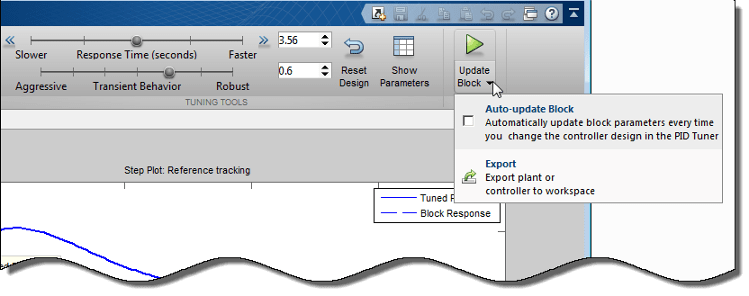
На вкладке PID Tuner щелкните![]() , чтобы обновить блок ПИД-контроллера Simulink с помощью настроенных параметров ПИД.
, чтобы обновить блок ПИД-контроллера Simulink с помощью настроенных параметров ПИД.
Совет
Чтобы автоматически обновить параметры блоков ПИД при настройке контроллера в PID Tuner, нажмите Update Block и проверьте Auto-update block.
Симулируйте модель Simulink и оцените, соответствует ли выход симуляции требованиям вашего проекта.
Поскольку PID Tuner работает с линейной моделью вашего объекта, симулированный отклик иногда не совпадает с реакцией в PID Tuner. Дополнительные сведения см. Симулированный отклик разделе «Не совпадает PID Tuner ответом».
Если симулированный отклик не соответствует требованиям вашего проекта, см. «Не удается найти приемлемую разработку ПИД в моделируемой модели».
