Настройка ПИД-регуляторов
MATLAB Toolstrip: На вкладке Apps, в разделе Control System Design and Analysis, щелкните значок приложения.
Командная строка MATLAB: Ввод pidTuner.
Simulink модель: В диалоговом окне PID Controller или PID Controller (2DOF) блока нажмите Tune.
Plant - Токовый объектImport | ...В Plant меню отображается имя текущего объекта, который PID Tuner использует для проектирования контроллера.
Измените текущий объект с помощью следующих опций меню:
Список моделей LTI, имеющихся в PID Tuner Data Browser.
Import - Импорт новой модели LTI из рабочего пространства MATLAB.
Re-Linearize Closed Loop - Линеаризация объекта в другое время моментального снимка. См. раздел Настройка в другой рабочей точке (Simulink Control Design). Эта опция доступна только при настройке PID Controller или PID Controller (2DOF) блока в модели Simulink.
Identify New Plant - Используйте систему идентификации, чтобы получить объект из измеренных или моделируемых данных отклика системы (требует программного обеспечения System Identification Toolbox). См.:
Интерактивная оценка параметров объекта из данных отклика при настройке ПИД-регулятора для модели LTI.
Интерактивная оценка объекта из измеренных или Симулированный отклик данных (Simulink Control Design), при настройке блока PID Controller в модели Simulink.
Если вы настраиваете ПИД-регулятор для объекта, представленного моделью LTI, объект по умолчанию является:
Plant = 1, если вы открыли PID Tuner с вкладки Apps на панели инструментов MATLAB, или если вы использовали pidTuner команда без входного параметра.
Объект, указанный вами в качестве входного параметра pidTuner.
Если вы настраиваете PID Controller или PID Controller (2DOF) блок в модели Simulink, то объект по умолчанию линеаризируется в рабочей точке, заданной начальными условиями модели. Видите, какое растение PID Tuner видите? (Simulink Control Design)
Type - Тип контроллера'PI' | 'PIDF' | 'PID2' | ...Тип контроллера определяет, какие условия присутствуют в ПИД-регуляторе. Для образца ПИ-контроллера имеет пропорциональный и интегральный член. A PDF контроллера имеет пропорциональный член и отфильтрованный производный член.
Если вы настраиваете контроллер для объекта, представленного моделью LTI, используйте меню Type, чтобы задать тип контроллера. Когда вы меняете тип контроллера, PID Tuner автоматически проектирует новый контроллер. Доступные типы контроллеров включают 2-DOF ПИД-регуляторы для большей гибкости в компромиссе между подавлением помех и эталонным отслеживанием. Для получения дополнительной информации о доступных типах контроллеров см. ПИД-регулятор типов для настройки.
Если вы настраиваете PID Controller или PID Controller (2DOF) блок в модели Simulink, в Type поле отображается тип контроллера, заданный в диалоговом окне блока.
Form - Форма контроллера'Parallel' | 'Standard'В этом поле отображается форма контроллера.
Если вы настраиваете контроллер для объекта, представленного моделью LTI, используйте меню Form, чтобы задать форму контроллера. Для получения информации о параллельных и стандартных формах смотрите pid и pidstd страницы с описанием.
Если вы настраиваете PID Controller или PID Controller (2DOF) блок в модели Simulink, в Form поле отображается форма контроллера, заданная в диалоговом окне блока.
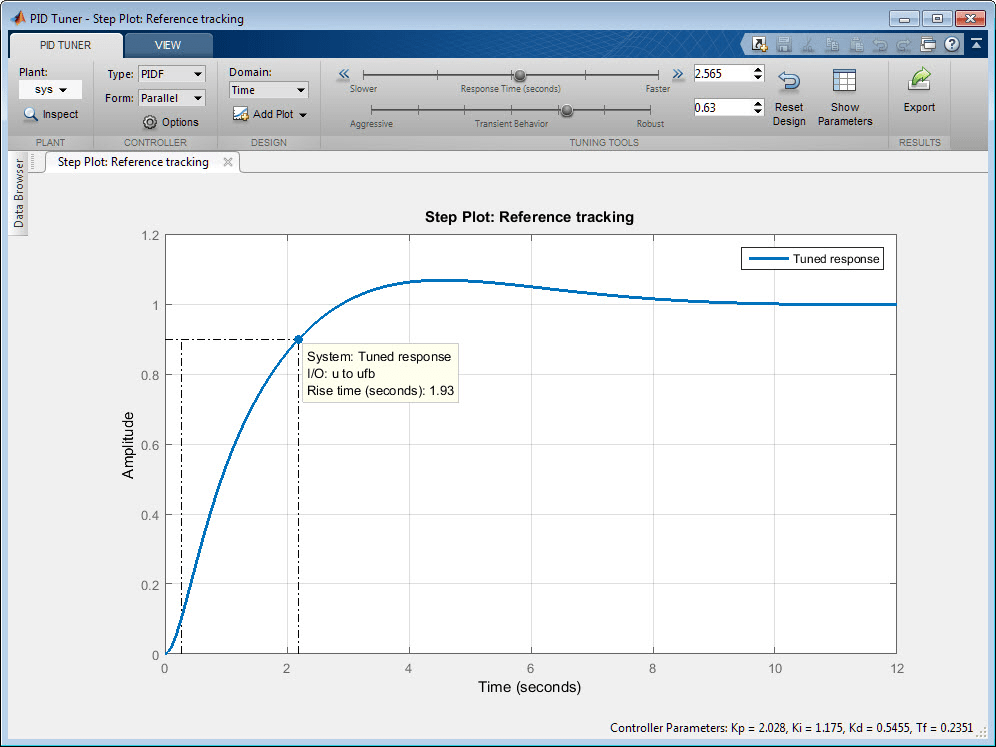
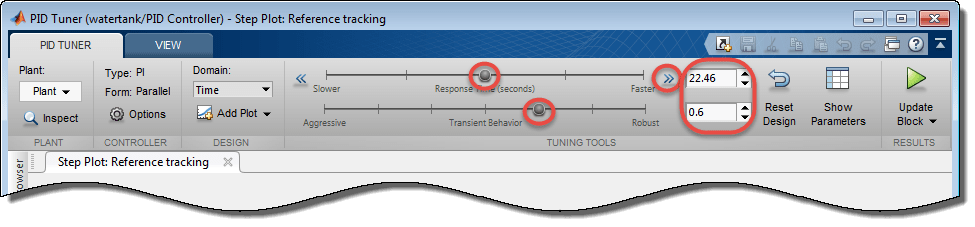
Domain - Область для определения целевых показателей эффективности'Time' | 'Frequency'Меню Domain позволяет переключать область, в которой PID Tuner отображает целевые параметры эффективности.
Time - Ползунки устанавливают Response Time и Transient Behavior.
Frequency - Ползунки устанавливают Bandwidth и Phase Margin.
Чтобы уточнить проектирование контроллера, вы корректируете целевые параметры эффективности с помощью ползунков или соответствующих числовых значений.
Для получения дополнительной информации смотрите:
Уточните Проект (настройка контроллера для модели LTI)
Уточните проект (Simulink Control Design) (настройка PID Controller или PID Controller (2DOF) блок в модели Simulink)
Add Plot - Создание графиков для анализаReference Tracking | Input Disturbance Rejection | Controller Effort | ...Создайте частотный диапазон и графики для анализа во временной области, чтобы помочь проанализировать эффективность ПИД-регулятора. Для получения подробной информации о доступных графиках отклика смотрите:
Анализируйте дизайн в PID Tuner (настройка контроллера для модели LTI)
Анализируйте Проект в PID Tuner (Simulink Control Design) (настройка PID Controller или PID Controller (2DOF) блок в модели Simulink)
Для настройки ПИД в командной строке используйте pidtune. pidtune команда может проектировать контроллер для нескольких объектов сразу.
Интерактивную настройку ПИД в Live Editor см. в задаче Tune ПИД-регулятора Live Editor. Эта задача позволяет вам в интерактивном режиме проектировать ПИД-регулятор и автоматически генерирует код MATLAB для вашего live скрипта.
