Batch linearization относится к извлечению нескольких линеаризаций из модели для различных комбинаций операций ввода-вывода, рабочих точек и значений параметров. Пакетная линеаризация позволяет вам анализировать временную область, частотный диапазон и характеристики устойчивости вашего Simulink® модель или фрагменты вашей модели при меняющихся рабочих условиях и областях значений параметров. Можно использовать результаты пакетной линеаризации для разработки контроллеров, устойчивых к изменениям параметров, или для разработки контроллеров с запланированным коэффициентом усиления для различных условий работы. Можно также использовать результаты пакетной линеаризации, чтобы реализовать линейные приближения (LPV) параметров нелинейных систем с помощью LPV System блока Control System Toolbox™.
Чтобы понять различные типы пакетной линеаризации, рассмотрите магнитный мяч левитационную модель, magball. Для получения дополнительной информации об этой модели см. Magball Simulink Model.
Можно пакетно линеаризировать эту модель путем варьирования любой комбинации из следующих:
Наборы ввода-вывода - линеаризация модели с помощью различных операций ввода-вывода для получения любой передаточной функции с обратной или разомкнутым контуром.
Для magball модель, некоторые передаточные функции, которые можно извлечь путем определения различных наборов ввода-вывода, включают:
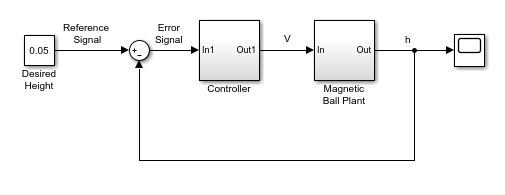
Магнитный мяч модели объекта управления, моделей контроллеров
Передаточная функция с обратной связью от Reference Signal на выход объекта, h
Передаточная функция разомкнутой системы для контроллера и магнитного мяча объекта объединенной; то есть передаточная функция от Error Signal на h с разомкнутым циклом обратной связи
Выходная модель подавления помех или передаточная функция чувствительности, полученная на выходе Magnetic Ball Plant блок
Рабочие точки - В нелинейных моделях динамика модели варьируется в зависимости от условий работы. Можно линеаризировать нелинейную модель в различных рабочих точках, чтобы изучить, как изменяется динамика модели, или спроектировать контроллеры для различных условий работы.
Для примера динамики модели, которые варьируются в зависимости от рабочей точки, рассмотрите простой невынужденный подвесной маятник с угловым положением и скоростью как состояния. Эта модель имеет две точки равновесия, одну, когда маятник висит вниз, что стабильно, и другую, когда маятник указывает вверх, что нестабильно. Линеаризация близко к стабильной рабочей точке создает стабильную модель, в то время как линеаризация этой модели близко к нестабильной рабочей точке создает нестабильную модель.
Для magball модель, которая использует высоту мяча в качестве состояния, можно получить несколько линеаризаций для изменения начальных высот мяча.
Параметры - Параметры конфигурируют модель Simulink несколькими способами. Для примера можно использовать параметры, чтобы задать коэффициенты модели или шагов расчета контроллера. Можно также использовать дискретный параметр, такой как вход управления в блок Multiport Switch, чтобы управлять путем данных в модели. Поэтому изменение параметра может служить области значений целей, в зависимости от того, как параметр способствует модели.
Для magball модель, можно варьировать параметры блока PID Controller, Controller/PID Controller. Линеаризации, полученные путем изменения этих параметров, показывают, как контроллер влияет на динамику системы управления. Кроме того, можно изменить значения параметров магнитного мяча для определения робастности контроллера до изменений в модели объекта управления. Можно также варьировать параметры входного блока, Desired Heightи исследуйте эффекты изменения входных уровней на отклике модели.
Если параметры влияют на рабочую точку модели, можно пакетно обрезать модель с помощью выборок параметров, а затем пакетно линеаризировать модель в результирующих рабочих точках.
