Подавьте коэффициент усиления циклов обратной связи на высокой частоте при использовании Control System Tuner.
Цель максимального усиления цикла применяет максимальное усиление цикла в конкретной полосе частот. Эта цель настройки полезна, например, для повышения робастности системы до немоделированной динамики.
Цель максимального усиления цикла накладывает максимальное усиление на частотную характеристику (L) разомкнутого контура в заданном месте в вашей системе управления. Вы задаете максимальное усиление без разомкнутого контура как функцию от частоты (максимальное gain profile). Для циклов обратной связи MIMO указанный профиль усиления интерпретируется как верхняя граница наибольшего сингулярного значения L.
Когда вы настраиваете систему управления, профиль максимального усиления преобразуется в ограничение максимального усиления на дополнительной функции чувствительности, T = L/( I + L ).
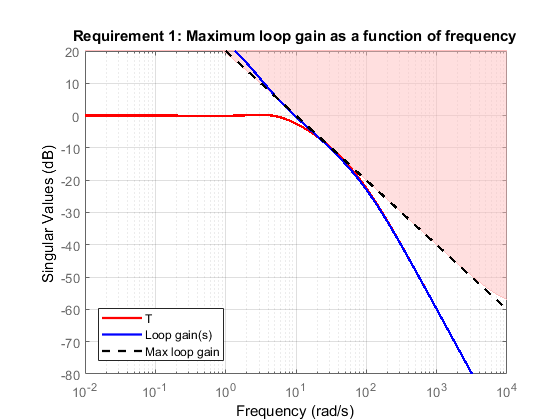
Следующий рисунок показывает типичный заданный профиль максимального усиления (штриховая линия) и полученный настроенный коэффициент усиления цикла, L (синяя линия). Затененная область представляет значения профиля усиления, которые запрещены этим требованием. Рисунок показывает, что, когда L намного меньше 1, наложение максимального усиления на T является хорошим прокси для максимального коэффициента усиления без разомкнутого контура.
Цель максимального усиления цикла является ограничением на усиление разомкнутого контура заданного цикла управления. Таким образом, коэффициент усиления контура вычисляется с циклом, открытым в заданном месте. Чтобы вычислить коэффициент усиления с открытиями цикла в других точках системы управления, используйте опцию Compute response with the following loops open в Open-Loop Response Selection разделе диалогового окна.
Цель максимального усиления цикла и Цель минимального усиления цикла задают только ограничения высокого или низкого усиления в определенных полосах. При использовании этих требований программное обеспечение определяет лучшую форму цикла рядом с перекрестием. Когда форма цикла около перекрестия проста или хорошо понятна (например, интегральное действие), можно использовать Цикл Shape Goal, чтобы задать целевой цикл форму.
На вкладке Tuning Control System Tuner выберите New Goal > Maximum gain for open-loop response, чтобы создать цель максимального усиления.
При настройке систем управления в командной строке используйте TuningGoal.MaxLoopGain чтобы задать максимальную цель усиления цикла.
Используйте этот раздел диалогового окна, чтобы задать местоположения сигналов, в которых можно вычислить коэффициент усиления без разомкнутого контура. Можно также задать дополнительные местоположения открытия цикла для оценки цели настройки.
Shape open-loop response at the following locations
Выберите в модели одно или несколько местоположений сигнала, в которых можно вычислить и ограничить коэффициент усиления без разомкнутого контура. Чтобы ограничить ответ SISO, выберите одно место. Для примера ограничить коэффициент усиления разомкнутого контура в местоположении с именем 'y', нажмите![]() Add signal to list и выберите 'y'
Add signal to list и выберите 'y'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или векторный сигнал.
Compute response with the following loops open
Выберите в модели одно или несколько местоположений сигнала, в которых можно открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается относительно строения разомкнутого контура, созданной открытием циклов обратной связи в идентифицируемых вами местах. Например, чтобы вычислить цель настройки с открытием в местоположении с именем 'x', нажмите![]() Add signal to list и выберите 'x'
Add signal to list и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в Simulink® модель, click. ![]() Чтобы удалить сигнал из входного или выходного списка, нажмите.
Чтобы удалить сигнал из входного или выходного списка, нажмите. ![]() Когда вы выбрали несколько сигналов, можно переупорядочить их, используя
Когда вы выбрали несколько сигналов, можно переупорядочить их, используя![]() и.
и. ![]() Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Используйте этот раздел диалогового окна, чтобы задать целевой максимальный коэффициент усиления цикла.
Pure integrator K/s
Проверяйте, чтобы задать чистую форму интегратора для целевого максимального усиления цикла. Программа выбирает константу интегратора, K, на основе значений, которые вы задаете для целевого максимального усиления и частоты. Для примера, чтобы задать профиль интегральной составляющей с частотой среза 10 рад/с, введите 1 в Choose K to keep gain below текстовом поле. Затем введите 10 в at the frequency текстовом поле. Программное обеспечение выбирает константу интегратора таким образом, чтобы максимальное усиление цикла составляло 1 при 10 рад/с.
Other gain profile
Проверяйте, чтобы задать максимальный профиль усиления как функцию от частоты. Введите числовую модель LTI SISO, величина которой представляет желаемый профиль усиления. Для примера можно задать плавную передаточную функцию (tf, zpk, или ss модель). Кроме того, можно нарисовать кусочно-целевой коэффициент усиления цикла с помощью frd модель. Когда вы делаете это, программное обеспечение автоматически преобразует профиль в плавную передаточную функцию, которая аппроксимирует желаемый максимальный коэффициент усиления цикла. Для примера, чтобы задать максимальный коэффициент усиления 100 (40 дБ) ниже 0,1 рад/с, скатываясь со скоростью -20 дБ/дес на более высоких частотах, введите frd([100 100 10],[0 1e-1 1]).
Если вы настраиваете в дискретном времени, можно задать максимальный профиль усиления как модель в дискретном времени с тем же временем дискретизации, как вы используете для настройки. Если вы задаете профиль усиления за непрерывное время, программа настройки дискретизирует его. Установка профиля в дискретном времени дает вам больше контроля над профилем около частоты Найквиста.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели максимального усиления цикла.
Enforce goal in frequency range
Ограничьте принудительное применение цели настройки конкретной полосой частот. Задайте полосу частоты как вектор-строка вида [min,max], выраженная в частотных модулях вашей модели. Например, чтобы создать цель настройки, которая применяется только между 1 и 100 рад/с, введите [1,100]. По умолчанию цель настройки применяется на всех частотах для непрерывного времени и вплоть до частоты Найквиста для дискретного времени.
Stabilize closed loop system
По умолчанию цель настройки накладывает требование устойчивости на передаточную функцию с обратной связью от заданных входов к выходам, в дополнение к ограничению усиления. Если стабильность не требуется или не может быть достигнута, выберите No для снятия требования к устойчивости. Например, если ограничение усиления применяется к нестабильной передаточной функции без разомкнутого контура, выберите No.
Equalize loop interactions
Для ограничениях усиления в мультициклах или циклах MIMO, каналы обратной связи автоматически пересматриваются, чтобы выровнять вне-диагональные (циклическое взаимодействие) условия в передаточная функция без разомкнутого контура. Выберите Off отключить такое масштабирование и сформировать немасштабированную разомкнутым контуром характеристику.
Apply goal to
Используйте эту опцию при настройке нескольких моделей сразу, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что вы хотите применить цель настройки ко второй, третьей и четвертой моделям в массиве моделей. Чтобы ограничить применение требования, введите 2:4 в Only Models текстовом поле.
Для получения дополнительной информации о настройке для нескольких моделей см. «Робастные подходы к настройке» (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x является вектором свободных (настраиваемых) параметров в системе управления. Затем программа настраивает значения параметров, чтобы минимизировать f (x) или привести f (x) ниже 1, если цель настройки является жестким ограничением.
Для Maximum Loop Gain Goal f (x) определяется:
Здесь D является диагональным масштабированием (для циклов MIMO). T - дополнительная функция чувствительности в заданном местоположении. WT является функцией взвешивания частот, полученной из заданного вами максимального профиля усиления цикла. Усиление этой функции примерно совпадает с обратным значением заданного цикла усиления для значений в диапазоне от -60 дБ до 20 дБ. По числовым причинам уровни взвешивающей функции выключаются вне этой области значений, если заданный профиль усиления не изменяет наклон вне этой области значений. Эта корректировка называется regularization. Потому что полюса WT близки к s = 0 или s = Inf может привести к плохому числовому обусловлению для настройки, не рекомендуется задавать профили усиления с очень низкочастотной или очень высокочастотной динамикой. Для получения дополнительной информации о регуляризации и ее эффектах смотрите Визуализация целей настройки.
Несмотря на то, что T является передаточной функцией с обратной связью, управление f (x) < 1 эквивалентно ограничению верхней границы передачи с разомкнутым контуром, L, в полосе, где коэффициент усиления L меньше единицы. Чтобы увидеть, почему, обратите внимание, что T = L/( I + L). Для циклов SISO, когда | L | <<1, | T | ≈ | L |. Поэтому применение требования максимального усиления без разомкнутого контура, |<reservedrangesplaceholder6>| < 1/|<reservedrangesplaceholder5>|, примерно эквивалентно применению |<reservedrangesplaceholder4>| < 1. Для циклов MIMO применяются аналогичные аргументы с ||<reservedrangesplaceholder3>|| ≈ σ max (L), где σ max является наибольшим сингулярным значением.
Эта цель настройки накладывает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в заданном, оцениваемом с циклами, открытыми в заданных местах открытия цикла. Динамика, на которую влияет это неявное ограничение, является stabilized dynamics для этой цели настройки. Опции Minimum decay rate и Maximum natural frequency настройки управляют нижней и верхней границами на этих неявно ограниченной динамике. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию конфликтуют с другими требованиями, на вкладке Tuning используйте Tuning Options, чтобы изменить значения по умолчанию.
