UAV Toolbox позволяет моделировать алгоритмы вождения в виртуальном окружении, которая использует Unreal Engine® из эпических игр®. В целом системы координат, используемые в этом окружении, следуют соглашениям, описанным в разделе «Системы координат для моделирования» (Aerospace Toolbox). Однако при симуляции в этом окружении важно знать о конкретных различиях и деталях реализации систем координат.
UAV Toolbox использует эти системы координат, чтобы вычислить динамику аппарата и положения объектов в среде визуализации Unreal Engine.
Окружение | Описание | Системы координат |
|---|---|---|
Динамика аппарата БПЛА в Simulink® | Правое правило устанавливает последовательность X-Y-Z и поворот осей координат, используемых для вычисления динамики аппарата. Интерфейс UAV Toolbox к среде симуляции Unreal Engine использует правые (RH) Декартовы системы координат:
| |
Нереальная визуализация Engine | Чтобы расположить объекты и запросить окружение визуализации Unreal Engine, UAV Toolbox использует мировую систему координат. |
Фиксированные по земле оси системы координат (XE, YE, ZE) фиксируются в инерционной системе отсчета. Инерционная система координат имеет нуль линейное и угловое ускорение и нулевую скорость вращения. В ньютоновской физике земля является инерционной ссылкой.
| Ось | Описание |
|---|---|
| КСЕНОН | Ось XE находится в прямом направлении транспортного средства. Оси XE и YE параллельны плоскости земли. Плоскость Земли является горизонтальной плоскостью, нормальной к гравитационному вектору. |
| ВЫ | |
| ЗЕ | В ориентации Z-up положительная ось ZE указывает вверх. В ориентации Z-вниз положительная ось ZE указывает вниз. |
Моделирование самолета и космического аппарата является простым, если вы используете систему координат, фиксированную в самом теле. В случае самолета направление вперед изменяется наличием ветра, и движение судна через воздух не совпадает с его движением относительно земли. Неинерционная система координат тела фиксируется как в источник, так и в ориентации к движущемуся судну. Судно принято жестким. Ориентация координатных осей тела фиксируется в форме тела.
The x-ось указывает через нос судна.
The y-ось указывает справа от x-ось (обращенная в направлении зрения пилота), перпендикулярная x-ось.
The z-ось указывает вниз через дно судна, перпендикулярно x- y плоскость и удовлетворение правому правилу.
Перемещения заданы перемещением вдоль этих осей на расстояния x, y, и z от источника.
![]()
Повороты заданы углами Эйлера P, Q, R или Они есть
P или В: Вращайте о x- ось
Q или В: Тангаж о y- ось
R Или И: Зевай о z- ось
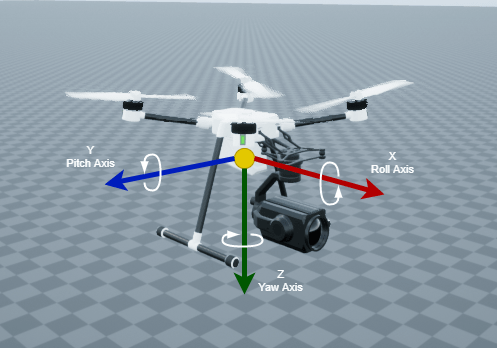
Если не указано иное, по умолчанию программа использует порядок поворота ZYX для углов Эйлера.
Окружение Unreal Engine использует мировую систему координат с осями, которые фиксируются в инерционной системе отсчета.
![]()
| Ось | Описание |
|---|---|
| X | Прямое направление транспортного средства Крен - Вращение вправо вокруг оси X |
| Y | Простирается вправо от транспортного средства, параллельно плоскости земли Тангаж - Вращение вправо вокруг оси Y |
| Z | Простирается вверх Рыскание - Вращение влево вокруг оси Z |
