Трехосный корпус транспортного средства с продольным, боковым и рысканием
Динамика автомобиля транспортное средство
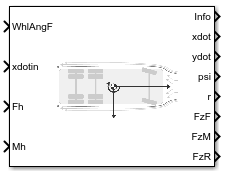
Блок Vehicle Body 3DOF Three Axles реализует твердую трехосную модель кузова транспортного средства, чтобы вычислить продольное, боковое и рыскание. Блок учитывает силы реакции оси и сцепки из-за ускорения массы тела транспортного средства, аэродинамического сопротивления и рулевого управления.
Используйте этот блок в динамике аппарата и беспилотных исследованиях, чтобы смоделировать неголономическое транспортное средство движение, когда транспортное средство шаг, крен и вертикальное движение не значительны.
Используйте параметр Vehicle track, чтобы задать количество треков.
| Настройка дорожки транспортного средства | Реализация |
|---|---|
|
|
| Силы действуют в местоположениях жестких точек оси. |
Используйте параметр Axle forces, чтобы задать тип силы.
| Настройка сил оси | Реализация |
|---|---|
|
|
|
|
|
|
Чтобы создать дополнительные порты входа, под Input signals выберите эти параметры блоков.
Параметр панели входных сигналов | Input port | Описание |
|---|---|---|
Front wheel steering |
| Угол переднего колеса, δF |
| Middle wheel steering | WhlAngM | Угол среднего колеса, δM |
| Rear wheel steering | WhlAngR | Угол заднего колеса, δR |
External wind |
| Скорость, WX, WY и WZ ветра в инерционной системе координат |
| External friction | Mu | Коэффициент трения |
| External forces | FExt | Внешняя сила на центр тяжести транспортного средства (CG), Fx, Fy и Fz в неподвижной системе координат автомобиля |
| External moments |
| Внешний момент вокруг CG, Mx, My и Mz транспортного средства в неподвижной системе координат |
| Front hitch forces | FhF | Сила сцепки, приложенная к корпусу в месте передней сцепки, FhFx, FhFy и FhFz, в неподвижной системе координат автомобиля |
| Front hitch moments | MhF | Момент сцепки в местоположении передней сцепки, MhFx, MhFy и MhFz, вокруг неподвижной системы координат автомобиля |
| Rear hitch forces | FhR | Сила сцепления, приложенная к корпусу в месте задней сцепки, FhRx, FhRy и FhRz, в неподвижной системе координат автомобиля |
| Rear hitch moments | MhR | Момент сцепки в месте задней сцепки, MhRx, MhRy и MhRz, вокруг неподвижной системы координат автомобиля |
Initial longitudinal position |
| Начальное перемещение CG транспортного средства вдоль фиксированной по земле оси X |
Initial yaw angle |
| Начальное вращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси Z (рыскание) |
Initial longitudinal velocity |
| Начальная скорость CG транспортного средства вдоль фиксированной оси X |
Initial yaw rate |
| Начальная скорость вращения автомобиля вокруг фиксированной в транспортном средстве оси Z (скорость рыскания) |
Initial lateral position |
| Начальное перемещение CG транспортного средства вдоль фиксированной по земле оси Y |
Air temperature | AirTemp | Температура окружающего воздуха. Рассмотрите эту опцию, если вы хотите изменить температуру во время исполнения. |
Initial lateral velocity |
| Начальная скорость CG транспортного средства вдоль фиксированной оси Y автомобиля |
Чтобы определить движение транспортного средства, блок решает уравнения плоской динамики твердого тела.
| Вычисление | Описание |
|---|---|
Динамика | Блок решает уравнения планарной динамики твердого тела, чтобы определить продольное движение транспортного средства. Если вы задаете Axle forces |
Внешние силы | Внешние силы включают как входные параметры перетаскивания, так и входы внешних сил. Силы действуют на транспортное средство CG. Блок делит нормальные силы на номинальную нормальную нагрузку, чтобы изменить эффективные параметры трения во время передачи веса и нагрузки. Блок поддерживает равновесие тангажа и крена. |
Силы шин | Блок использует отношение локальных, продольных и поперечных скоростей, чтобы определить углы скольжения. Блок использует углы рулевого управления, чтобы преобразовать силы шины в неподвижную систему координат автомобиля. Если вы задаете Axle forces |
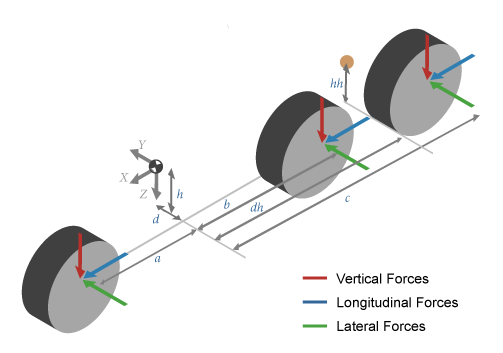
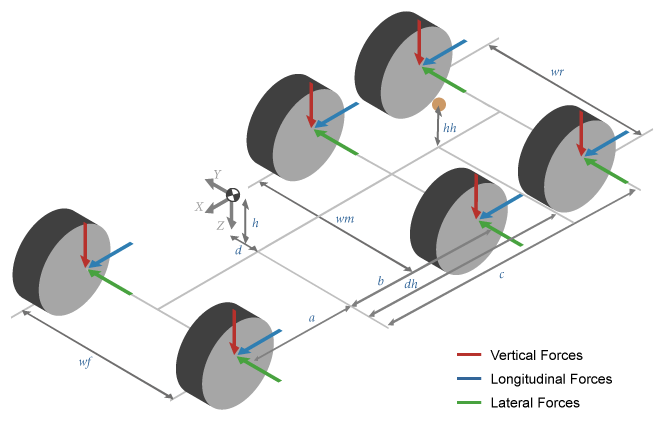
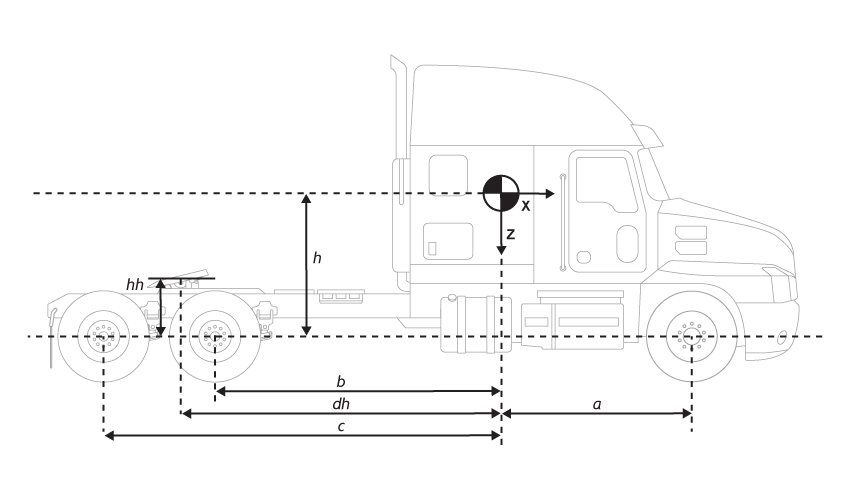
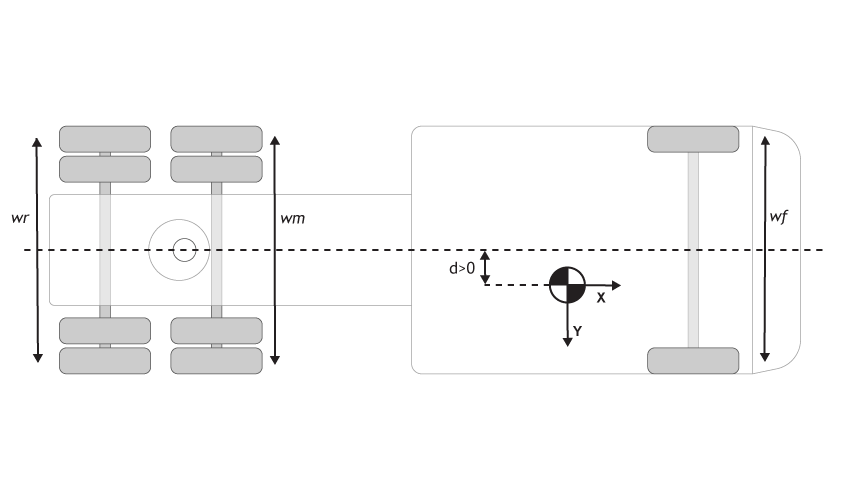
В рисунки используются эти переменные.
| a, b, c | Продольное расстояние передней, средней и задней осей, соответственно, от точки нормальной проекции CG транспортного средства до плоскости общей оси |
| h | Высота CG транспортного средства над плоскостью оси вдоль фиксированной оси Z транспортного средства |
| d | Боковое расстояние от геометрической осевой линии до центра масс вдоль фиксированной оси Y автомобиля |
| hh | Высота сцепки над плоскостью оси вдоль фиксированной оси Z автомобиля |
| dh | Продольное расстояние сцепки от точки нормальной проекции CG транспортного средства до плоскости общей оси |
| hl | Боковое расстояние от центра масс до зацепления вдоль фиксированной по оси Y транспортного средства. |
| wf, wm, wr | Ширина передней, средней и задней дорожек, соответственно |
В этой таблице суммируется реализация блока для вычисления перетаскивания.
| Вычисление | Описание |
|---|---|
Преобразование координат | Блок преобразует скорости ветра из инерционной системы координат в фиксированную систему координат автомобиля. |
Перетащите силы | Чтобы определить относительную воздушную скорость, блок вычитает скорость ветра из скорости транспортного средства CG. Используя относительную воздушную скорость, блок определяет силы сопротивления. |
Перетащите моменты | Используя относительную воздушную скорость, блок определяет моменты перетаскивания. |
Чтобы включить отображенные угловую жесткость и динамические параметры длины релаксации, задайте Axle forces External longitudinal force или External longitudinal velocity.
| Настройки параметров | Описание | |
|---|---|---|
| Сопоставленная угловая жесткость | Включите динамику длины релаксации | |
|
| Блок использует постоянные угловые значения жесткости. Углы скольжения включают динамические настройки длины релаксации. Длина релаксации аппроксимирует эффективную угловую силу жесткости, которая является функцией хода колеса. |
|
| Блок использует интерполяционные таблицы, которые являются функциями угловых данных жесткости и углов скольжения. Углы скольжения включают динамические настройки длины релаксации. Длина релаксации аппроксимирует эффективную угловую силу жесткости, которая является функцией хода колеса. |
|
| Блок использует постоянные угловые значения жесткости. |
Vehicle track - Количество дорожек транспортных средствDual (по умолчанию) | Single (bicycle)Используйте параметр Vehicle track, чтобы задать количество треков.
| Настройка дорожки транспортного средства | Реализация |
|---|---|
|
|
| Силы действуют в местоположениях жестких точек оси. |
Axle forces - Тип осевой силыExternal longitudinal velocity (по умолчанию) | External longitudinal forces | External forcesИспользуйте параметр Axle forces, чтобы задать тип силы.
| Настройка сил оси | Реализация |
|---|---|
|
|
|
|
|
|
Front wheel steering — WhlAngF входной портon (по умолчанию) | offВыберите, чтобы создать входной порт WhlAngF.
Middle wheel steering — WhlAngM входной портoff (по умолчанию) | onВыберите, чтобы создать входной порт WhlAngM.
Rear wheel steering — WhlAngR входной портoff (по умолчанию) | onВыберите, чтобы создать входной порт WhlAngR.
External wind — WindXYZ входной портoff (по умолчанию) | onВыберите, чтобы создать входной порт WindXYZ.
External friction — Mu входной портoff (по умолчанию) | onВыберите, чтобы создать входной порт Mu.
Чтобы включить этот параметр, установите Axle forces равным External longitudinal forces или External forces.
External forces — FExt входной портoff (по умолчанию) | onВыберите, чтобы создать входной порт FExt.
External moments — MExt входной портoff (по умолчанию) | onВыберите, чтобы создать входной порт MExt.
Hitch forces — Fh входной портon (по умолчанию) | offВыберите, чтобы создать входной порт Fh.
Hitch moments — Mh входной портon (по умолчанию) | offЗадайте, чтобы создать входной порт Mh.
Initial longitudinal position — X_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт X_o.
Initial yaw angle — psi_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт psi_o.
Initial longitudinal velocity — xdot_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт xdot_o.
Чтобы включить этот параметр, установите Axle forces равным External longitudinal forces или External forces.
Initial yaw rate — r_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт r_o.
Initial lateral position — Y_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт Y_o.
Air temperature — AirTemp входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт AirTemp.
Initial lateral velocity — ydot_o входной портoff (по умолчанию) | onЗадайте, чтобы создать входной порт ydot_o.
Number of wheels on front axle, NF - Количество передних колес2 (по умолчанию) | scalarКоличество колес на передней оси, NF, без размеров.
Number of wheels on middle axle, NM - Количество средних колес2 (по умолчанию) | scalarКоличество колес на средней оси, NM, без размеров.
Number of wheels on rear axle, NR - Количество задних колес2 (по умолчанию) | scalarКоличество колес на задней оси, NR, без размеров.
Vehicle mass, m - Масса транспортного средства47000 (по умолчанию) | scalarМасса транспортного средства, m, в кг.
Longitudinal distance from center of mass to front axle, a - Расстояние от CM до передней оси0.5 (по умолчанию) | scalarРасстояние от транспортного средства CM до передней оси, a, в м.
Longitudinal distance from center of mass to middle axle, b - Расстояние от CM до средней оси4.5 (по умолчанию) | scalarРасстояние от CM транспортного средства до средней оси, b, в м.
Longitudinal distance from center of mass to rear axle, c - Расстояние от CM до задней оси5.7 (по умолчанию) | scalarРасстояние от CM транспортного средства до задней оси, c, в м.
Vertical distance from center of mass to axle plane, h - Расстояние от CM до плоскости оси0.3 (по умолчанию) | scalarРасстояние по вертикали от CM транспортного средства до плоскости оси, h, в м.
Vertical distance from hitch to axle plane, hh - Расстояние от сцепки до плоскости оси0.5 (по умолчанию) | scalarРасстояние по вертикали от сцепки до плоскости оси, hh, в м.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Longitudinal distance from center of mass to hitch, dh - Расстояние от CM до сцепки5 (по умолчанию) | scalarПродольное расстояние от центра масс до сцепки, dh, в м.
Чтобы включить этот параметр, на панели Input signals выберите Hitch forces или Hitch moments.
Initial inertial frame longitudinal position, X_o - Начальное продольное перемещение0 (по умолчанию) | scalarНачальное перемещение КР транспортного средства вдоль фиксированной по земле оси X, в м.
Initial longitudinal velocity, xdot_o - Начальная продольная скорость0 (по умолчанию) | scalarНачальная скорость CG транспортного средства вдоль фиксированной оси X, в м/с.
Чтобы включить этот параметр, задайте Axle forces одну из следующих опций:
External longitudinal forces
External forces
Mapped corner stiffness - Включите сопоставленную угловую жесткостьoff (по умолчанию) | onВключает расчет угловой жесткости.
Чтобы включить этот параметр, задайте Axle forces одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Include relaxation length dynamics - Включите динамику длины релаксацииon (по умолчанию) | offВключает динамику длины релаксации.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить Mapped corner stiffness.
Lateral distance from geometric centerline to center of mass, d - Расстояние от осевой линии до СМ0 (по умолчанию) | scalarБоковое расстояние от геометрической осевой линии до центра масс, d, в м, вдоль фиксированной по оси Y автомобиля. Положительные значения указывают, что CM транспортного средства находится справа от геометрической осевой линии. Отрицательные значения указывают, что CM транспортного средства находится слева от геометрической осевой линии.
Track width, w - Ширина передней, средней и задней дорожек[1.82,1.82,1.82] (по умолчанию) | vectorПередняя, средняя и задняя ширина дорожки, wf, wm и, wr, соответственно, в м. Размерности 1-by-3.
Чтобы включить этот параметр, установите Vehicle track равным Dual.
Front axle tire corner stiffness, Cy_f - Жесткость угла передней шины12e3 | scalarЖесткость угла передней шины, Cyf, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить Mapped corner stiffness.
Middle axle tire corner stiffness, Cy_m - Средняя жесткость угла шины11e3 | scalarСредняя ось шины угловой жесткости, Cym, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить Mapped corner stiffness.
Rear axle tire corner stiffness, Cy_r - Задняя жесткость угла шины11e3 | scalarЗадняя ось шины угловой жесткости, Cyr, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить Mapped corner stiffness.
Front tire(s) relaxation length, sigma_f - Длина релаксации передних шин.1 (по умолчанию) | scalarДлина передней шины, σf, в м.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Mapped corner stiffness.
Очистить Mapped corner stiffness и выбрать Include relaxation length dynamics.
Middle tire(s) relaxation length, sigma_m - Средняя длина релаксации шин.1 (по умолчанию) | scalarСредняя длина расслабления шин, σm, в м.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Mapped corner stiffness.
Очистить Mapped corner stiffness и выбрать Include relaxation length dynamics.
Rear tire(s) relaxation length, sigma_r - Длина релаксации задних шин.1 (по умолчанию) | scalarДлина релаксации задних шин, σr, в м.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выполните одно из следующих действий:
Выберите Mapped corner stiffness.
Очистить Mapped corner stiffness и выбрать Include relaxation length dynamics.
Front axle slip angle breakpoints, alpha_f_brk - Точки останова[-.1 .1] (по умолчанию) | vectorТочки прерывания угла скольжения передней оси, αfbrk, в рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Front axle tire corner data, Cy_f_data - Данные по углу шин передней оси[-9e3 9e3] (по умолчанию) | vectorДанные по углу шин передней оси, Cyfdata, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Middle axle slip angle breakpoints, alpha_m_brk - Точки останова[-.1 .1] (по умолчанию) | vectorСредние точки прерывания угла скольжения оси, αmbrk, в рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Middle axle tire corner data, Cy_m_data - Данные по углу средней оси шины[-9e3 9e3] (по умолчанию) | vectorДанные по углу средней оси шины, Cymdata, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle slip angle breakpoints, alpha_r_brk - Точки останова[-.1 .1] (по умолчанию) | vectorТочки прерывания угла скольжения заднего моста, αrbrk, в рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Rear axle tire corner data, Cy_r_data - Данные по углу шины заднего моста[-9e3 9e3] (по умолчанию) | vectorДанные по углу шины заднего моста, Cyrdata, в Н/рад.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Выберите Mapped corner stiffness.
Initial inertial frame lateral displacement, Y_o - Начальное боковое перемещение0 (по умолчанию) | scalarНачальное перемещение КР транспортного средства вдоль фиксированной по земле оси Y, в м.
Initial lateral velocity, ydot_o - Начальная поперечная скорость0 (по умолчанию) | scalarНачальная скорость CG транспортного средства вдоль фиксированной по оси Y, в м/с.
Yaw polar inertia, Izz - Инерция4000 (по умолчанию) | scalarРыскать полярную инерцию, в кг * м ^ 2.
Initial yaw angle, psi_o - Вращение Psi0 (по умолчанию) | scalarВращение неподвижной системы координат автомобиля вокруг фиксированной по земле оси Z (рыскание), в рад.
Initial yaw rate, r_o - Скорость рыскания0 (по умолчанию) | scalarСкорость вращения транспортного средства вокруг фиксированной оси Z (скорость рыскания), в рад/с.
Longitudinal drag area, Af - Эффективная площадь поперечного сечения транспортного средства2 (по умолчанию) | scalarЭффективная площадь поперечного сечения транспортного средства, Af, для вычисления аэродинамической силы сопротивления на транспортном средстве, в м2.
Longitudinal drag coefficient, Cd - Коэффициент сопротивления воздуха.3 (по умолчанию) | scalarКоэффициент сопротивления воздуха, Cd. Значение безразмерно.
Longitudinal lift coefficient, Cl - Коэффициент подъема воздуха.1 (по умолчанию) | scalarКоэффициент подъема воздуха, Cl. Значение безразмерно.
Longitudinal drag pitch moment, Cpm - Перетаскивание тангажа.1 (по умолчанию) | scalarКоэффициент тангажа продольного сопротивления, Cpm. Значение безразмерно.
Relative wind angle vector, beta_w - Угол ветра[0:0.01:0.3] (по умолчанию) | vectorОтносительный вектор угла ветра, βw, в рад.
Side force coefficient vector, Cs - Коэффициент боковой силы [0:0.03:0.9] (по умолчанию) | vectorКоэффициент боковой силы вектора коэффициент, Cs. Значение безразмерно.
Yaw moment coefficient vector, Cym - Перетаскивание момента рыскания[0:0.01:0.3] (по умолчанию) | vectorКоэффициент вектора коэффициента рыскания, Cym. Значение безразмерно.
Absolute air pressure, Pabs - Давление101325 (по умолчанию) | scalarАбсолютное давление окружающей среды, Pabs, в Па.
Air temperature, Tair - Температура273 (по умолчанию) | scalarАбсолютная температура окружающей среды, T, в К.
Чтобы включить этот параметр, очистите Air temperature.
Gravitational acceleration, g - Сила тяжести9.81 (по умолчанию) | scalarУскорение свободного падения, g, в м/с ^ 2.
Nominal friction scaling factor, mu - Масштабный коэффициент трения1 (по умолчанию) | scalarНоминальный коэффициент шкалы трения, μ. Значение безразмерно.
Чтобы включить этот параметр:
Установите Axle forces в одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Очистить External Friction.
Longitudinal velocity tolerance, xdot_tol - Допуск.01 (по умолчанию) | scalarПродольная скорость допуска, в м/с.
Nominal normal force, Fznom - Нормальная сила5000 (по умолчанию) | scalarНоминальная нормальная сила, в Н.
Чтобы включить этот параметр, задайте Axle forces одну из следующих опций:
External longitudinal velocity
External longitudinal forces
Geometric longitudinal offset from axle plane, longOff - Продольное смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от плоскости оси вдоль фиксированной оси X, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы найти шасси независимо от CG транспортного средства.
Geometric lateral offset from center plane, latOff - Поперечное смещение0 (по умолчанию) | scalarШасси транспортного средства смещено от центральной плоскости вдоль фиксированной по оси Y машины, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы найти шасси независимо от CG транспортного средства.
Geometric vertical offset from axle plane, vertOff - Смещение по вертикали0 (по умолчанию) | scalarШасси транспортного средства смещено от плоскости оси вдоль фиксированной оси Z автомобиля, в м. Когда вы используете 3D двигатель визуализации, рассмотрите использование смещения, чтобы найти шасси независимо от CG транспортного средства.
Wrap Euler angles, wrapAng - Обмотка углов Эйлера к интервалу [-pi, pi]off (по умолчанию) | onОберните углы Эйлера к интервалу [-pi, pi]. Для маневров транспортного средства, которые могут подвергнуться вращениям рыскания транспортного средства, которые находятся вне этого интервала, рассмотрите удаление параметра, если вы хотите:
Отслеживайте общее вращение рыскания транспортного средства.
Избегайте разрывов в оценщиках состояния транспортного средства.
[1] Гиллеспи, Томас. Основы динамики аппарата. Warrendale, PA: Society of Automotive Engineers (SAE), 1992.

