Вычислите среднее, дисперсию и стандартное отклонение
Vision HDL Toolbox/Статистика
Блок Image Statistics вычисляет среднее значение, дисперсию и стандартное отклонение потоковых данных видео. Каждое вычисление выполняется по всем пикселям в вход видимой области (ROI). Блок реализует вычисления с помощью аппаратно эффективных алгоритмов.
Этот блок использует интерфейс потокового пикселя с шиной для сигналов управления системой координат. Этот интерфейс позволяет блоку работать независимо от размера и формата изображения. Все блоки Vision HDL Toolbox™ используют один и тот же потоковый интерфейс. Блок принимает скалярное значение пикселя и шину, которая содержит пять сигналов управления. Сигналы управления указывают валидность каждого пикселя и его местоположение в системе координат. Чтобы преобразовать систему координат (пиксельную матрицу) в поток пикселей и сигналы управления, используйте блок Frame To Pixels. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Чтобы изменить размер и размерности ROI, можно манипулировать входными сигналами управления видеопотоком. См. Необходимые области.
Количество действительных пикселей в вход изображении влияет на точность среднего приближения. Чтобы избежать ошибки приближения, используйте изображение, которое содержит кратное 64n пикселей, до 64n+1 пикселей, где n равен 0, 1, 2 или 3. Для получения дополнительной информации о среднем приближении, см. Алгоритм.
Блок вычисляет статистику по системам координат до 644 (16, 777, 216) пикселей в размере. Этот размер поддерживает HD-системы координат.
Вычисления среднего значения, дисперсии и стандартного отклонения складываются друг от друга. Для оборудования эффективности логика вычисления разделяется, как показано.
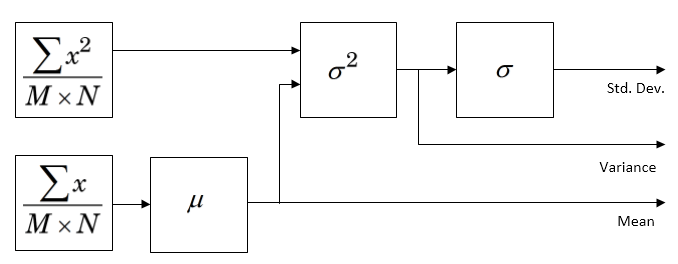
Уравнение для вычисления точного среднего пиксельного значения требует больших внутренних размеров слова и дорогой логики деления.
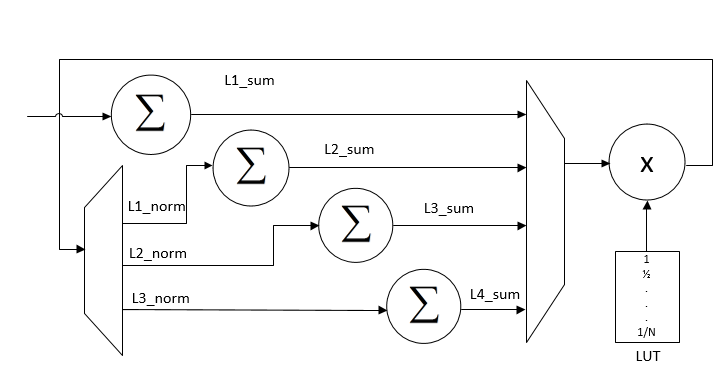
Вместо использования этого уравнения блок вычисляет среднее значение на серию из четырех аккумуляторов, которые вычисляют среднее значение сегмента пикселей. Сначала блок находит сумму окна в 64 пикселя и нормализуется.
Затем он накапливает 64 из предыдущих окон, и нормализуется.
Третий аккумулятор суммирует 64 из 64 × 64 окон и нормализует то же самое.
Четвертый аккумулятор составляет 64 из 64 × 64 × 64 окон и нормализуется.
Каждый допустимый пиксель накапливается по мере его поступления. Его расположение внутри линии или системы координат не влияет на логику накопления.
Когда vEnd получают, блок продвигает любые оставшиеся данные на четырех уровнях среднего вычисления, чтобы вычислить конечный выход. Если счетчик аккумулятора не на 64, когда vEnd приходит, этот уровень нормализуется фактическим значением счетчика. Константы для этого умножения хранятся в интерполяционной таблице (LUT). Четыре аккумулятора имеют один LUT и множитель. Значения в LUT указаны в ufix18_en17 тип данных, так что множитель помещается в блок DSP на FPGA.
Этот метод среднего вычисления точен, когда количество пикселей в системе координат выравнивается vEnd с конечным опрокидыванием аккумулятора. Это выравнивание происходит на уровне 2, когда система координат содержит несколько 64 пикселей и менее 642(4096) пикселей. Это происходит на уровне 3, когда система координат содержит несколько 4096 пикселей. Это происходит на уровне 4, когда система координат содержит кратное 643 пиксели. Этот способ также точен, когда система координат имеет менее 64 пикселей, потому что необходим только первый аккумулятор.
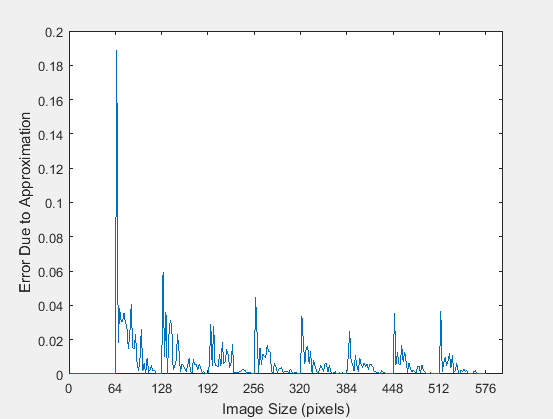
Однако, когда количество пикселей в системе координат не соответствует этим условиям, блок должен нормализовать окончательное накопление, прежде чем счетчик достигнет 64. Эта нормализация вносит ошибку в вычисление на последующих уровнях. Рисунок показывает ошибку нормализации, введенную в среднее вычисление размерами изображения менее 4096 пикселей. Всплески происходят там, где размер изображения чуть больше 64 пикселей.
Для изображений, больше 4096 пикселей, такой же эффект происходит при кратных 4096 пикселей и при множителях 643 пиксели.
Блок вычисляет отклонение входных пикселей с помощью этого уравнения:
Среднее и среднее значение квадратного входа вычисляются параллельно. Блок вычисляет среднее значение квадратов, используя тот же метод приближения, используемый для вычисления среднего, как описано в предыдущем разделе.
Блок вычисляет квадратный корень отклонения с помощью конвейерного алгоритма bit-set-and-check. Этот алгоритм вычисляет квадратный корень с помощью сложения и сдвигов, а не умножителей. Для N -битного входа результат имеет N бит точности.
Этот метод является аппаратно эффективным для общих входов. Если ваши данные имеют известные характеристики, которые позволяют более эффективную реализацию квадратного корня, можно отключить вычисление в этом блоке и создать собственную логику из HDL-поддерживаемых блоков.
Frame To Pixels | visionhdl.ImageStatistics | 2-D Mean (Computer Vision Toolbox) | 2-D Standard Deviation (Computer Vision Toolbox) | 2-D Variance (Computer Vision Toolbox)
