Находит углы с помощью алгоритма FAST или Harris
The visionhdl.CornerDetector Системная object™ обнаруживает углы с помощью алгоритма FAST или алгоритма пересекающихся ребер (Harris). Для каждого пикселя, если пиксель является углом, объект возвращает угловую метрику. Если пиксель не является углом, объект возвращает значение пикселя, равное нулю.
Алгоритм FAST проверяет округлую область вокруг потенциального центра угла. Тест обнаруживает угол, если смежная секция пикселей либо ярче, чем центр плюс порог, либо темнее, чем центр минус порог. Можно задать минимальный порог контрастности как свойство или аргумент и выбрать из трех правил, чтобы задать угол. Эти правила определяют, сколько пикселей в круге пикселей должно превысить минимальную контрастность для центрального пикселя, которая должна считаться углом. Объект выполняет параллельные тесты всех комбинаций смежных пикселей вокруг круга. Алгоритм FAST использует немного аппаратных ресурсов.
Алгоритм Харриса вычисляет горизонтальный и вертикальный градиенты, фильтрует градиентные компоненты с помощью кругового Гауссова фильтра 5 на 5 и вычисляет метрику, которая представляет силу угла. Можно задать порог, который определяет уровень, на котором обнаруживаются углы. Объект возвращает угол для пикселей, где метрика превышает этот порог. Алгоритм Харриса использует больше аппаратных ресурсов, чем алгоритм FAST, но может обнаружить углы, которые может не найти алгоритм FAST.
Чтобы обнаружить углы в потоке пикселей:
Создайте visionhdl.CornerDetector Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
corners = visionhdl.CornerDetector( возвращает детектор угла Системный объект. Задайте свойства с помощью одной или нескольких пар "имя-значение". Заключайте каждое имя свойства в одинарные кавычки. Name,Value)
Для примера:
corners = visionhdl.CornerDetector('Method','FAST 7 of 12',... 'MinContrastSource','Input port',... 'PaddingMethod','None')
Если не указано иное, свойства являются нетронутыми, что означает, что вы не можете изменить их значения после вызова объекта. Объекты блокируются, когда вы вызываете их, и release функция разблокирует их.
Если свойство настраивается, можно изменить его значение в любой момент.
Для получения дополнительной информации об изменении значений свойств смотрите Разработку системы в MATLAB Использование Системных объектов.
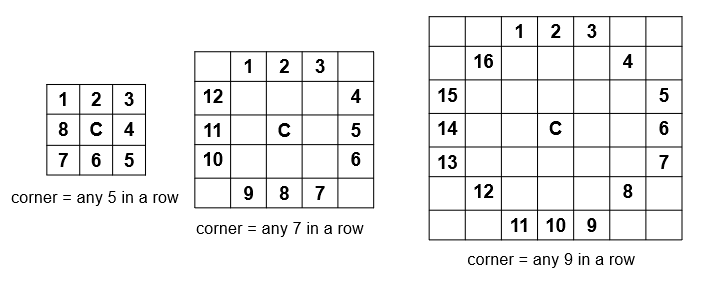
Method - Метод обнаружения'FAST 5 of 8' (по умолчанию) | 'FAST 7 of 12' | 'FAST 9 of 16' | 'Harris'Выберите алгоритм Харриса или размер круга для алгоритма FAST. Три опции FAST определяют, сколько смежных пикселей на круге должно превысить порог для центрального пикселя, помеченного как угол. Для кругов на 8, 12 и 16 пикселей, показанных на этих рисунках, объект обнаруживает угол, когда 5, 7 или 9 смежных пикселей, соответственно, находятся выше порога. Объект проверяет это количество смежных пикселей в любом месте круга. Объект использует ядро размера 3 на 3 для 'FAST 5 of 8', 5 на 5 для 'FAST 7 of 12', и 7 на 7 для 'FAST 9 of 16'.
MinContrastSource - Источник для порога, который указывает угол для алгоритма FAST'Property' (по умолчанию) | 'Input port'Задайте 'Property' для установки контрастного порога при помощи MinContrast свойство. Задайте 'Input port' чтобы включить thresh входной параметр.
Чтобы включить это свойство, установите Method свойство одного из опций FAST.
MinContrast - Порог, указывающее угол для алгоритма FAST20 (по умолчанию) | неотрицательное целое числоКаждый пиксель в круге вычитается из значения центрального пикселя, и только те различия, которые превышают этот порог, используются, чтобы определить, является ли центральный пиксель углом, и вычислить выход метрику. Это значение приведено к совпадающий тип данных, что и pixelIn.
Чтобы включить это свойство, установите Method свойство одной из опций FAST и установите MinContrastSource свойство к 'Property'.
ThresholdSource - Источник для порога, который указывает угол для алгоритма Харриса'Property' (по умолчанию) | 'Input port'Задайте 'Property' для установки порога при помощи Threshold свойство. Задайте 'Input port' чтобы включить thresh входной параметр.
Чтобы включить это свойство, установите Method свойство к 'Harris'.
Порог - Порог, который указывает угол для алгоритма Харриса15000
(по умолчанию) | неотрицательное целое числоЭто значение представляет приближение собственных значений матрицы Харриса, вычисленных из результатов градиента. Объект возвращает угол для пикселей, где метрика превышает этот порог. Это значение приведено к тому совпадающий тип данных, что и выходные corner. Угловая метрика находится в области значений четвертой степени входов пикселя. Для примера для 8-битного пикселя входы, полноточный выходной размер составляет 44 бита.
Чтобы включить это свойство, установите Method свойство к 'Harris' и установите ThresholdSource свойство к 'Property'.
LineBufferSize - Размер линейного буфера2048 (по умолчанию) | целое числоЗадайте степень двойки, которая будет включать количество активных пикселей в одной горизонтальной линии.
Если вы задаете значение, которое не является степенью двойки, объект использует следующую наибольшую степень двойки. Объект выделяет (N - 1) -by- LineBufferSize местоположения памяти для хранения пикселей. N - размер ядра.
Объект использует ядро размера 3 на 3, когда Method свойство 'FAST 5 of 8', 5 на 5, когда Method является 'FAST 7 of 12', и 7 на 7, когда Method является 'FAST 9 of 16'.
Когда вы задаете Method на 'Harris'объект использует одно ядро 1 на 3 и одно ядро 3 на 1 для градиентного вычисления и три ядра 5 на 5 для кругового оконного фильтра на трех градиентных компонентах.
PaddingMethod - Метод заполнения'Symmetric' (по умолчанию) | 'Replicate' | 'None'Выберите один из следующих методов для заполнения контура входного изображения. Для получения дополнительной информации об этих методах см. Раздел «Заполнение ребер».
'Symmetric' - Установите значение пикселей заполнения, чтобы зеркально отобразить ребро изображения. Эта опция препятствует обнаружению углов на контурах активной системы координат.
'Replicate' - Повторите значение пикселей на краю изображения.
'None' - Исключить логику заполнения. Объект не устанавливает пиксели вне системы координат изображения на какое-либо конкретное значение. Эта опция уменьшает аппаратные ресурсы, используемые объектом, и гашение, необходимое между системами координат, но влияет на точность выходных пикселей на ребрах системы координат. Для поддержания синхронизации потока пикселей выхода системы координат совпадает с размером входного кадра. Однако, чтобы избежать использования пикселей, вычисленных из неопределенных значений заполнения, замаскируйте n/2 пикселя вокруг ребра системы координат для дочерних операций, где n является размером ядра операции. Для получения дополнительной информации смотрите Увеличение пропускной способности при отсутствии заполнения.
Круговые фильтры окна, используемые в алгоритме Харриса, заполняют ребра системы координат, используя 'Replicate' заполнение.
RoundingMethod - Режим округления, используемый для операций с фиксированной точкой'Floor' (по умолчанию) | 'Ceiling' | 'Convergent' | 'Nearest' | 'Round' | 'Zero'Режим округления, используемый для операций с фиксированной точкой. Когда вход является любым целым числом или типом данных с фиксированной точкой, алгоритм использует арифметику с фиксированной точкой для внутренних вычислений. Эта опция не применяется, когда тип входных данных single или double.
OverflowAction - Режим переполнения, используемый для операций с фиксированной точкой'Saturate' (по умолчанию) | 'Wrap'Режим переполнения, используемый для операций с фиксированной точкой. Когда вход является любым целым числом или типом данных с фиксированной точкой, алгоритм использует арифметику с фиксированной точкой для внутренних вычислений. Эта опция не применяется, когда тип входных данных single или double.
OutputDataType - Метод определения типа данных выходной угловой метрики'Same as first input' (по умолчанию) | 'Custom' | 'Full precision'Метод для определения типа данных выходов угловой метрики.
'Same as first input''- Устанавливает тип данных угловой метрики, соответствующий типу данных pixelIn.
'Custom' - Устанавливает тип данных угловой метрики, соответствующий типу данных, заданному в CustomOutputDataType свойство.
'Full precision''- Вычисляет внутренние и выходные типы данных с помощью правил полной точности. Эти правила обеспечивают точные цифры с фиксированной точкой и предотвращают квантование внутри объекта. Биты добавляются, по мере необходимости, чтобы предотвратить округление и переполнение.
CustomOutputDataType - Тип данных для выходной угловой метрикиnumerictype(0,8,0) (по умолчанию) | numerictype(signed,WL,FL)Тип данных для выхода угловой метрики, заданный как numerictype(signed,WL,FL), где WL - размер слова, а FL - длина дроби в битах. Объект определяет угловую метрику для этого типа данных.
Это свойство применяется при установке OutputDataType на 'Custom'.
[ задает порог, который определяет угол как входной параметр. Этот синтаксис применим как для алгоритмов Harris, так и для FAST. Порог интерпретируется по-разному для каждого алгоритма. Чтобы включить этот аргумент при использовании алгоритма FAST, установите corner,ctrlOut] = corners(pixelIn,thresh,ctrlIn)MinContrastSource свойство к 'Input port'. Чтобы включить этот аргумент при использовании алгоритма Харриса, установите ThresholdSource свойство к 'Input port'.
Этот объект использует интерфейс потокового пикселя со структурой для сигналов управления системой координат. Этот интерфейс позволяет объекту работать независимо от размера и формата изображения и соединяться с другими объектами Vision HDL Toolbox™. Объект принимает и возвращает скалярное значение пикселя и сигналы управления как структуру, содержащую пять сигналов. Сигналы управления указывают валидность каждого пикселя и его местоположение в системе координат. Чтобы преобразовать пиксельную матрицу в поток пикселей и сигналы управления, используйте visionhdl.FrameToPixels объект. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Этот объект реализует алгоритмы, описанные на Corner Detector блочных страниц с описанием.
