Поиск углов с помощью алгоритма FAST или Harris
Vision HDL Toolbox/Анализ и совершенствование
Блок Corner Detector обнаруживает углы с помощью алгоритма FAST или алгоритма пересекающихся ребер (Harris). Для каждого пикселя, если пиксель является углом, блок возвращает угловую метрику. Если пиксель не является углом, блок возвращает значение пикселя, равное нулю.
Алгоритм FAST проверяет округлую область вокруг потенциального центра угла. Тест обнаруживает угол, если смежная секция пикселей либо ярче, чем центр плюс порог, либо темнее, чем центр минус порог. Можно задать минимальный порог контрастности в качестве параметра или порта и выбрать из трех правил, чтобы задать угол. Эти правила определяют, сколько пикселей в круге пикселей должно превысить минимальную контрастность для центрального пикселя, которая должна считаться углом. Блок выполняет параллельные тесты всех комбинаций смежных пикселей вокруг круга. FAST использует очень мало аппаратных ресурсов
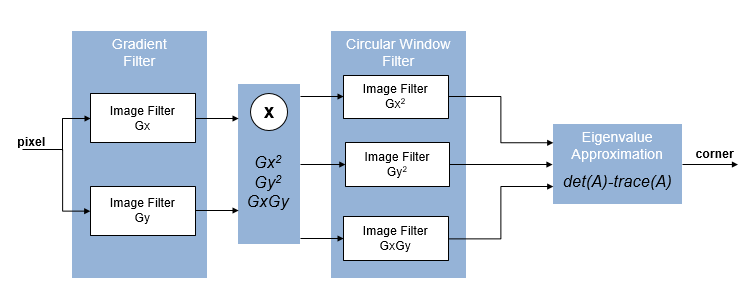
Алгоритм Харриса вычисляет горизонтальный и вертикальный градиенты, фильтрует градиентные компоненты с помощью кругового Гауссова фильтра 5 на 5 и вычисляет метрику, которая представляет силу угла. Можно задать порог, который определяет уровень, на котором обнаруживаются углы. Блок возвращает угол для пикселей, где метрика превышает этот порог. Алгоритм Харриса использует больше аппаратных ресурсов, чем алгоритм FAST, но может обнаружить углы, которые может не найти алгоритм FAST.
Этот блок использует интерфейс потокового пикселя с pixelcontrol шина для сигналов управления системой координат. Этот интерфейс позволяет блоку работать независимо от размера и формата изображения. Все блоки Vision HDL Toolbox™ используют один и тот же потоковый интерфейс. Блок принимает и возвращает скалярное значение пикселя и шину, которая содержит пять сигналов управления. Сигналы управления указывают валидность каждого пикселя и его местоположение в системе координат. Чтобы преобразовать систему координат (пиксельную матрицу) в последовательный поток пикселей и сигналы управления, используйте блок Frame To Pixels. Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
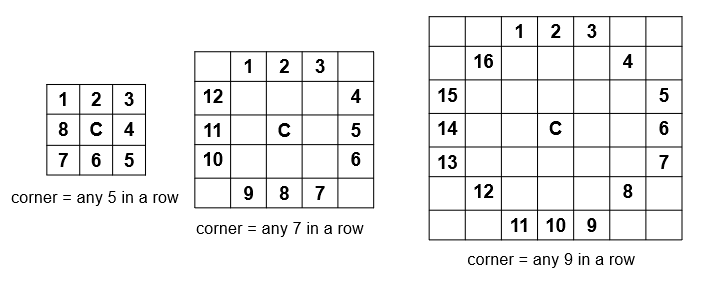
Method - Метод обнаруженияFAST 5 of 8 (по умолчанию) | FAST 7 of 12 | FAST 9 of 16 | HarrisВыберите алгоритм Харриса или размер круга для алгоритма FAST. Три опции FAST определяют, сколько смежных пикселей на круге должно превысить порог для центрального пикселя, помеченного как угол. Для кругов на 8, 12 и 16 пикселей, показанных на этих рисунках, блок обнаруживает угол, когда 5, 7 или 9 смежных пикселей, соответственно, находятся выше порога. Блок проверяет это количество смежных пикселей в любом месте круга. Блок использует ядро размера 3 на 3 для FAST 5 of 8, 5 на 5 для FAST 7 of 12, и 7 на 7 для FAST 9 of 16.
Source of minimum contrast value - Источник для порога, который указывает угол для алгоритма FASTProperty (по умолчанию) | Input portЗадайте Property для установки порога с помощью параметра MinContrast value. Задайте Input port чтобы включить порт minC.
Чтобы включить этот параметр, установите параметр Method на одну из опций FAST.
MinContrast value - Порог, указывающее угол для алгоритма FAST20 (по умолчанию) | неотрицательное целое числоКаждый пиксель в круге вычитается из значения центрального пикселя, и только те различия, которые превышают этот порог, используются, чтобы определить, является ли центральный пиксель углом, и вычислить выход метрику. Это значение приведено к тому совпадающий тип данных, что и входной pixel.
Чтобы включить этот параметр, установите параметр Method на одну из опций FAST и установите параметр Source of minimum contrast value на Property.
Source of threshold value - Источник для порога, который указывает угол для алгоритма ХаррисаProperty (по умолчанию) | Input portЗадайте Property для установки порога с помощью параметра Threshold value. Задайте Input port чтобы включить порт thresh.
Чтобы включить этот параметр, установите параметр Method равным Harris.
Threshold value - Порог, который указывает угол для алгоритма Харриса15000 (по умолчанию) | неотрицательное целое числоЭто значение представляет приближение собственных значений матрицы Харриса, вычисленных из результатов градиента. Блок возвращает угол для пикселей, где метрика превышает этот порог. Для получения дополнительной информации см. Детектирование углов методом Харриса пример. Это значение приведено к тому совпадающий тип данных, что и выходной corner. Угловая метрика находится в области значений четвертой степени входов пикселя. Для примера для 8-битного пикселя входы, полноточный выходной размер составляет 44 бита.
Чтобы включить этот параметр, установите параметр Method равным Harris и установите параметр Source of threshold value равным Property.
Line buffer size - Размер линейного буфера2048 (по умолчанию) | целое числоЗадайте степень двойки, которая будет включать количество активных пикселей в одной горизонтальной линии.
Если вы задаете значение, которое не является степенью двойки, блок использует следующую наибольшую степень двойки. Блок выделяет (N - 1) -by - Line buffer size места памяти для хранения пикселей. N - размер ядра.
Блок использует ядро размера 3 на 3, когда параметр Method FAST 5 of 8, 5 на 5, когда Method FAST 7 of 12и 7 на 7, когда Method FAST 9 of 16.
Когда вы задаете Method Harris, блок использует одно ядро 1 на 3 и одно ядро 3 на 1 для градиентного вычисления и три ядра 5 на 5 для кругового оконного фильтра на трех градиентных компонентах.
Padding method - Метод заполненияSymmetric (по умолчанию) | Replicate | NoneВыберите один из следующих методов для заполнения контура входного изображения. Для получения дополнительной информации об этих методах см. Раздел «Заполнение ребер».
Symmetric - Установите значение пикселей заполнения, чтобы зеркально отобразить ребро изображения. Эта опция препятствует обнаружению ребер на контурах активной системы координат.
Replicate - Повторите значение пикселей на краю изображения.
None - Исключить логику заполнения. Блок не устанавливает пиксели вне системы координат изображения на какое-либо конкретное значение. Эта опция уменьшает аппаратные ресурсы, используемые блоком, и гашение, необходимое между системами координат, но влияет на точность выходных пикселей на ребрах системы координат. Для поддержания синхронизации потока пикселей выхода системы координат совпадает с размером входного кадра. Однако, чтобы избежать использования пикселей, вычисленных из неопределенных значений заполнения, замаскируйте KernelSize/2 пикселя вокруг ребра системы координат для нижестоящих операций. Для получения дополнительной информации смотрите Увеличение пропускной способности при отсутствии заполнения.
Круговые фильтры окна, используемые в алгоритме Харриса, заполняют ребра системы координат, используя Replicate заполнение.
Rounding mode - Метод округления для внутренних вычислений с фиксированной точкойFloor (по умолчанию) | Ceiling | Convergent | Nearest | Round | ZeroЗадайте метод округления для внутренних вычислений с фиксированной точкой.
Saturate on integer overflow - Действие переполнения для внутренних вычислений с фиксированной точкойoff (по умолчанию) | onКогда вы очищаете этот параметр, значения с фиксированной точкой и целое число оборачиваются к нулю, когда значение переполняет то, что представимо с этим типом данных. Когда вы выбираете этот параметр, значение достигает максимального представимого значения.
Output Data Type - Тип данных для corner портаInherit same as first input (по умолчанию) | выражение типа данных | Inherit via internal ruleУкажите тип данных для порта выходов corner. По умолчанию блок возвращает метрику угла, используя тот совпадающий тип данных, что и входной pixel порт.
Когда вы используете блок с внутренним буфером линии внутри Enabled Subsystem (Simulink), шаблон сигнала включения должен поддерживать синхронизацию потока пикселей, включая минимальные интервалы гашения. Если шаблон enable повреждает синхронизацию потока пикселей, вы можете увидеть частичные выходные системы координат, поврежденные сигналы управления потоком пикселей или несоответствия между Simulink® и результаты симуляции HDL. Вам может потребоваться увеличить интервалы гашения, чтобы соответствовать циклам, когда активация низкая. Дополнительные сведения см. в разделе Настройка интервалов гашения.
Когда блок реализует алгоритм FAST, он использует буфер с одной линией для извлечения окон ядра. Алгоритм вычитает центральный пиксель ядра из каждого из пикселей круга. Для диаграмм ядра, см. Параметр Method. Каждый результат сравнивается с minContrast значением. Когда необходимое количество последовательных пикселей превышает порог, центр помечается как угол, и блок вычисляет метрику различия (SAD) для круга. В метрику включаются только те различия, которые превышают минимальный порог контрастности. Несмежные пиксели также включены в метрику. Это вычисление означает, что алгоритм обнаруживает светлый центральный пиксель, окруженный темными пикселями или темный центральный пиксель, окруженный светлыми пикселями, в качестве углов с высокими метриками. Чтобы оптимизировать эффективность оборудования, алгоритм конвейеризуется между каждой из операций сложения или вычитания.
Алгоритм Харриса использует пять фильтров изображений, чтобы вычислить два градиента и три круглых окна. Вычисление приближения собственного значения матрицы Харриса использует три умножителя и три сумматора и конвейеризовано, чтобы оптимизировать аппаратную эффективность. Схема показывает архитектуру алгоритма Харриса, где A является матрицей Харриса.
Для получения дополнительной информации об алгоритме Харриса смотрите Детектирование углов методом Харриса пример.
[1] «ВЫСОКОСКОРОСТНОЕ ОБНАРУЖЕНИЕ ФУНКЦИЙ ИЗОБРАЖЕНИЯ С ПОМОЩЬЮ РЕАЛИЗАЦИИ FPGA FAST ALGORITHM:» Материалы третьей Международной конференции по теории и применениям компьютерного зрения SciTePress - Science and Technology Publications, 2008, pp. 174-79. doi: 10,5220/ 0001080801740179.
[2] Ростен, Э. и Т. Драммонд. «Плавкие точки и линии для отслеживания высокой Эффективности». Материалы Международной конференции IEEE по компьютерному зрению, том 2, 2005, стр. 1508-11.
[3] Ростен, Э. и Т. Драммонд. «Машинное обучение для высокоскоростного обнаружения углов». Компьютерное зрение - ECCV 2006 Lecture Notes in Computer Science, 2006, 430-43. doi:10.1007/11744023_34.
[4] Харрис, К. и М. Стивенс. Комбинированный детектор углов и ребер. В работе Конференции Альви Вижн 1988 года, 23.1-23.6. Манчестер: Alvey Vision Club, 1988. DOI.org (Crossref), doi:10.5244/C.2.23.


