Дополнительная функция чувствительности из обобщенной модели системы управления
T = getCompSensitivity(CL,location)
T = getCompSensitivity(CL,location,opening)
Если opening и location перечислите ту же точку, программное обеспечение открывает цикл после добавления сигнала воздействия в точке.
Вычислите дополнительную чувствительность на объекте выход, X, из системы управления следующим рисунком.

Создайте модель системы путем определения и соединения числовой модели объекта управления LTI G, настраиваемый контроллер C, и AnalysisPoint блок X. Используйте AnalysisPoint блокируйтесь, чтобы отметить местоположение, где вы оцениваете дополнительную чувствительность, которая в этом примере является объектом выход.
G = tf([1],[1 5]); C = tunablePID('C','p'); C.Kp.Value = 3; X = AnalysisPoint('X'); CL = feedback(G*C,X);
CL genss модель, которая представляет ответ с обратной связью системы управления от r до y. Исследуйте Блоки Системы управления модели.
CL.Blocks
ans = struct with fields:
C: [1x1 tunablePID]
X: [1x1 AnalysisPoint]
Блоки модели включают AnalysisPoint блок, X, это идентифицирует местоположение аналитической точки.
Вычислите дополнительную чувствительность, T, в X.
T = getCompSensitivity(CL,'X')T =
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks:
C: Tunable PID controller, 1 occurrences.
X: Analysis point, 1 channels, 1 occurrences.
Type "ss(T)" to see the current value, "get(T)" to see all properties, and "T.Blocks" to interact with the blocks.
getCompSensitivity сохраняет Блоки Системы управления CL, и возвращает genss модель. Чтобы получить числовую модель, можно преобразовать T к форме передаточной функции, с помощью текущего значения настраиваемого блока.
Tnum = tf(T)
Tnum = From input "X" to output "X": -3 ----- s + 8 Continuous-time transfer function.
В многоконтурной системе следующего рисунка вычислите чувствительность внутреннего цикла при выходе G2, с открытым внешним контуром.

Создайте модель системы путем определения и соединения числовых моделей объекта управления, настраиваемых контроллеров и AnalysisPoint блоки. G1 и G2 модели объекта управления, C1 и C2 настраиваемые контроллеры и X1 и X2 AnalysisPoint блоки, которые отмечают потенциальные открывающие цикл местоположения.
G1 = tf(10,[1 10]); G2 = tf([1 2],[1 0.2 10]); C1 = tunablePID('C','pi'); C2 = tunableGain('G',1); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2'); CL = feedback(G1*feedback(G2*C2,X2)*C1,X1);
Вычислите дополнительную чувствительность, , в X2, с внешним контуром открываются в X1. Определение X1 когда третий входной параметр говорит getCompSensitivity открыть цикл в том местоположении.
T = getCompSensitivity(CL,'X2','X1'); tf(T)
ans =
From input "X2" to output "X2":
-s - 2
----------------
s^2 + 1.2 s + 12
Continuous-time transfer function.
complementary sensitivity function, T, в точке являются передаточной функцией с обратной связью вокруг обратной связи, измеренной в заданном местоположении. Это связано с передаточной функцией разомкнутого контура, L, и функцией чувствительности, S, в той же точке можно следующим образом:
Использование getLoopTransfer и getSensitivity вычислить L и S.
Рассмотрите следующую модель:
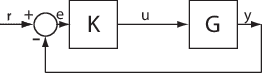
Дополнительная чувствительность, T, в y задан как передаточная функция от dy к y.
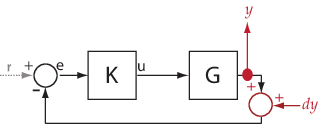
Заметьте что, в отличие от функции чувствительности, воздействия, dy, добавляется после измерения, y.
Здесь, I является единичной матрицей одного размера с G K. Дополнительная передаточная функция чувствительности в y равно -1 времена передаточная функция с обратной связью от r к y.
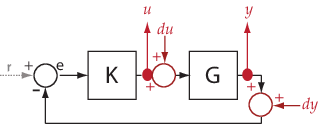
Дополнительная чувствительность в нескольких местоположениях, например, u и y, задан как передаточная функция MIMO от воздействий до измерений:
getPoints | AnalysisPoint | genss | getLoopTransfer | systune | getIOTransfer (Simulink Control Design) | getSensitivity | getValue | getCompSensitivity (Simulink Control Design)
