Отобразите данные о слое HERE HD Live Map на графике
plot( графики HD HERE Живая Карта [1] Данные о слое (HERE HDLM) по географические оси. layerData)layerData расположенный на слое объект карты, который был считан из выбранных мозаик hereHDLMReader объект при помощи read функция.
Загрузите последовательность координат широты и долготы от ведущего маршрута.
data = load('geoSequence.mat')data = struct with fields:
latitude: [1000×1 double]
longitude: [1000×1 double]
Создайте HD HERE Живая Карта (HERE HDLM) читатель от заданных координат. Если вы ранее не настроили учетные данные HERE HDLM, диалоговое окно предлагает вам вводить их. Средство чтения содержит разделенные на уровни данные о карте для мозаики, что ведущий маршрут включен.
reader = hereHDLMReader(data.latitude,data.longitude);
Считайте дорожные данные о топологии из TopologyGeometry слой. Отобразите данные на графике.
roadTopology = read(reader,'TopologyGeometry'); plot(roadTopology) legend('Location','northeastoutside')

Наложите ведущие координаты маршрута на графике.
hold on geoplot(data.latitude,data.longitude,'bo-','DisplayName','Route') hold off

Увеличьте масштаб маршрута.
latcenter = median(data.latitude); loncenter = median(data.longitude); offset = 0.005; latlim = [latcenter-offset,latcenter+offset]; lonlim = [loncenter-offset,loncenter+offset]; geolimits(latlim,lonlim)

Используйте HD HERE Живая Карта (HERE HDLM) сервис считать данные о топологии маршрута ведущего маршрута и его окружающего пространства. Отобразите эти данные на графике, и затем передайте маршрут потоком на географическом проигрывателе.
Загрузите координаты широты и долготы ведущего маршрута в Натике, Массачусетсе, США.
route = load('geoSequenceNatickMA.mat');
lat = route.latitude;
lon = route.longitude;Передайте координаты потоком на географическом проигрывателе.
player = geoplayer(lat(1),lon(1),'HistoryDepth',5); plotRoute(player,lat,lon) for idx = 1:length(lat) plotPosition(player,lat(idx),lon(idx)) end

Создайте читателя HERE HDLM из координат маршрута. Если вы ранее не настроили учетные данные HERE HDLM, диалоговое окно предлагает вам вводить их. Средство чтения содержит данные о карте для двух мозаик карты, которые пересекает маршрут.
reader = hereHDLMReader(lat,lon);
Считайте данные о топологии маршрута из LaneTopology слой мозаик карты. Постройте топологию маршрута.
laneTopology = read(reader,'LaneTopology');
plot(laneTopology)
Наложите данные о маршруте по графику.
hold on geoplot(lat,lon,'bo-','DisplayName','Route'); hold off

Наложите данные о топологии маршрута по географическому проигрывателю. Передайте маршрут потоком снова.
plot(laneTopology,'Axes',player.Axes) for idx = 1:length(lat) plotPosition(player,lat(idx),lon(idx)) end

Используйте веб-сервис HERE HD Live Map (HERE HDLM), чтобы считать 3-D данные о геометрии маршрута из мозаики карты. Затем отобразите данные на графике по основной карте OpenStreetMap®.
Создайте читателя HERE HDLM для ID мозаики карты, представляющего область Берлина, Германия. Если вы ранее не настроили учетные данные HERE HDLM, диалоговое окно предлагает вам вводить их.
tileID = uint32(377894435); reader = hereHDLMReader(tileID);
Добавьте основную карту OpenStreetMap в список basemaps, доступного для использования с сервисом HERE HDLM. После того, как вы добавите основную карту, вы не должны добавлять его снова на будущих сеансах.
name = 'openstreetmap'; url = 'https://a.tile.openstreetmap.org/${z}/${x}/${y}.png'; copyright = char(uint8(169)); attribution = copyright + "OpenStreetMap contributors"; addCustomBasemap(name,url,'Attribution',attribution)
Считайте 3-D данные о геометрии маршрута из LaneGeometryPolyline слой мозаики карты. Постройте геометрию маршрута на openstreetmap основная карта.
laneGeometryPolyline = read(reader,'LaneGeometryPolyline'); gx = plot(laneGeometryPolyline); geobasemap(gx,'openstreetmap')

Увеличьте масштаб центральной координаты мозаики карты.
latcenter = laneGeometryPolyline.TileCenterHere3dCoordinate.Here2dCoordinate(1); loncenter = laneGeometryPolyline.TileCenterHere3dCoordinate.Here2dCoordinate(2); offset = 0.001; latlim = [latcenter-offset,latcenter+offset]; lonlim = [loncenter-offset,loncenter+offset]; geolimits(latlim,lonlim)

layerData — Данные о слое HERE HDLMLaneGeometryPolyline возразите | LaneTopology возразите | TopologyGeometry объектДанные о слое HERE HDLM, чтобы построить в виде одного из расположенных на слое объектов, показанных в таблице.
| Расположенный на слое объект | Описание | Демонстрационный график |
|---|---|---|
LaneGeometryPolyline | 3-D геометрия маршрута, состоявшая из набора 3-D точек, к которым соединяют в ломаные линии. |
|
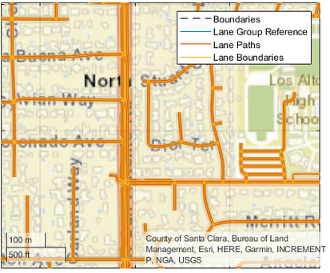
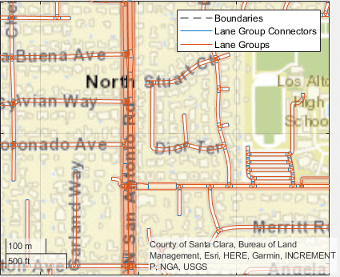
LaneTopology | Топология модели HD Lane, включая группу маршрута, коннектор группы маршрута, маршрут и топологию коннектора маршрута. Этот слой также содержит упрощенную 2D граничную геометрию модели маршрута для определения сродства мозаики карты и переполнения. |
|
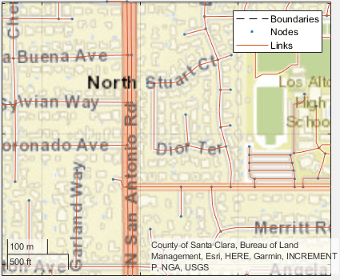
TopologyGeometry | Топология и 2D геометрия линии дороги. Этот слой также содержит определения ссылок (улицы) и узлы (пересечения и тупики) в мозаике карты. |
|
Получить эти слои из мозаик карты, выбранных hereHDLMReader объект, используйте read функция.
gxIn — Географические оси, по которым можно отобразить данные на графикеGeographicAxes объектГеографические оси, по которым можно отобразить данные на графике в виде GeographicAxes объект.[2]
hereHDLMReader | geoplayer | geoaxes | geoplot | geobasemap | read
[1] Необходимо заключить отдельное соглашение с HERE для того, чтобы получить доступ к сервисам HDLM и получить необходимые учетные данные (access_key_id и access_key_secret) для использования Сервиса HERE.
[2] Выравнивание контуров и меток области является представлением функции, обеспеченной по условию поставщики, и не подразумевает подтверждение MathWorks®.