Обнаружьте объекты и маршруты от визуальных измерений
Automated Driving Toolbox / Управление Сценарием и Моделирование Датчика
Блок Vision Detection Generator генерирует обнаружения от измерений камеры, проведенных датчиком видения, смонтированным на автомобиле, оборудованном датчиком.
Блок выводит обнаружения из симулированных положений агента и генерирует эти обнаружения, с промежутками равняются интервалу обновления датчика. По умолчанию на обнаружения ссылаются к системе координат автомобиля, оборудованного датчиком. Блок может симулировать действительные обнаружения с добавленным случайным шумом и также сгенерировать ложные положительные обнаружения. Статистическая модель генерирует шум измерения, истинные обнаружения и ложные положительные стороны. Чтобы управлять случайными числами, которые генерирует статистическая модель, используйте настройки генератора случайных чисел на вкладке Measurements блока.
Можно использовать Vision Detection Generator, чтобы создать вход с блоком Multi-Object Tracker. При создании сценариев и моделей датчика с помощью приложения Driving Scenario Designer, датчики камеры, экспортируемые в Simulink® выводятся, когда Vision Detection Generator блокируется.
Actors — Положения агента сценарияАгент сценария позирует в координатах автомобиля, оборудованного датчиком в виде шины Simulink, содержащей структуру MATLAB.
Структура должна содержать эти поля.
| Поле | Описание | Ввод |
|---|---|---|
NumActors | Количество агентов | Неотрицательное целое число |
Time | Текущее время симуляции | Скаляр с действительным знаком |
Actors | Положения агента | NumActors- массив длины агента излагает структуры |
Каждая структура положения агента в Actors должен иметь эти поля.
| Поле | Описание |
|---|---|
ActorID | Заданный сценарием идентификатор агента в виде положительного целого числа. |
Position | Положение агента в виде вектора с действительным знаком из формы [x y z]. Величины в метрах. |
Velocity | Скорость (v) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [v x v y v z]. Модули исчисляются в метрах в секунду. |
Roll | Крен агента в виде скаляра с действительным знаком. Модули в градусах. |
Pitch | Передайте угол агента в виде скаляра с действительным знаком. Модули в градусах. |
Yaw | Угол рыскания агента в виде скаляра с действительным знаком. Модули в градусах. |
AngularVelocity | Скорость вращения (ω) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [ω x ω y ω z]. Модули в градусах в секунду. |
Чтобы включить этот входной порт, установите параметр Types of detections generated by sensor на Objects only, Lanes with occlusion, или Lanes and objects.
Lane Boundaries — Контуры маршрутаКонтуры маршрута в автомобиле, оборудованном датчиком координируют в виде шины Simulink, содержащей структуру MATLAB.
Структура должна содержать эти поля.
| Поле | Описание | Ввод |
|---|---|---|
NumLaneBoundaries | Количество контуров маршрута | Неотрицательное целое число |
Time | Текущее время симуляции | Действительный скаляр |
LaneBoundaries | Контуры маршрута | NumLaneBoundaries- массив длины граничных структур маршрута |
Каждая граничная структура маршрута в LaneBoundaries должен иметь эти поля.
| Поле | Описание |
| Контур маршрута координирует в виде N с действительным знаком-by-3 матрицу, где N является количеством координат контура маршрута. Координаты контура маршрута задают положение точек на контуре на заданных продольных расстояниях далеко от автомобиля, оборудованного датчиком вдоль центра дороги.
Эта матрица также включает граничные координаты в нулевое расстояние от автомобиля, оборудованного датчиком. Эти координаты налево и право на источник автомобиля, оборудованного датчиком, который расположен под центром задней оси. Величины в метрах. |
| Искривление контура маршрута для каждой строки Coordinates матрица в виде N с действительным знаком-by-1 вектор. N является количеством координат контура маршрута. Модули исчисляются в радианах на метр. |
| Производная искривления контура маршрута для каждой строки Coordinates матрица в виде N с действительным знаком-by-1 вектор. N является количеством координат контура маршрута. Модули исчисляются в радианах на квадратный метр. |
| Начальный угол рыскания контура маршрута в виде действительного скаляра. Угол рыскания контура маршрута относительно заголовка автомобиля, оборудованного датчиком. Модули в градусах. |
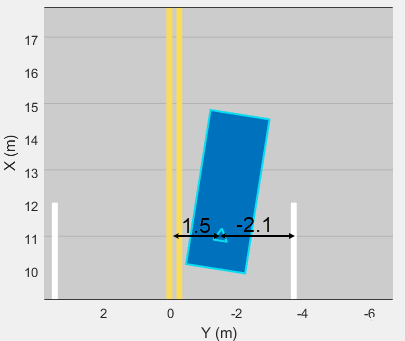
| Боковое смещение положения автомобиля, оборудованного датчиком от контура маршрута в виде действительного скаляра. Смещение к контуру маршрута слева от автомобиля, оборудованного датчиком положительно. Смещение справа от автомобиля, оборудованного датчиком отрицательно. Величины в метрах. В этом изображении автомобиль, оборудованный датчиком возмещен в 1,5 метрах от левого маршрута и в 2,1 метрах от правильного маршрута.
|
| Тип контура маршрута, отмечающего в виде одного из этих значений:
|
| Сила насыщения контура маршрута, отмечающего в виде действительного скаляра от 0 до 1. Значение |
| Ширина контура маршрута в виде положительного действительного скаляра. В маркере маршрута двойной линии та же ширина используется для обеих линий и для пробела между линиями. Величины в метрах. |
| Длина тире в пунктирных линиях в виде положительного действительного скаляра. В маркере маршрута двойной линии та же длина используется для обеих линий. |
| Продолжительность пробела между тире в пунктирных линиях в виде положительного действительного скаляра. В пунктирном маркере маршрута двойной линии то же пространство используется для обеих линий. |
Чтобы включить этот входной порт, установите параметр Types of detections generated by sensor на Lanes only, Lanes only, Lanes with occlusion, или Lanes and objects.
Датчик видения моделирует монокулярную камеру, которая производит 2D изображения камеры. Чтобы спроектировать координаты этих 2D изображений в 3-D мировые координаты, используемые в ведущих сценариях, алгоритм датчика принимает, что z, позиционный (высота) всех точек изображений базового края ограничительной рамки цели изображений, лежит на земле. Плоскость, задающая землю, задана свойством высоты генератора обнаружения видения, который задает смещение монокулярной камеры над землей плоскость. С этой проекцией вертикальные местоположения объектов в произведенных изображениях строго коррелируются к их высотам выше дороги. Однако, если дорога не является плоской, и высоты объектов отличаются от высоты датчика, то датчик сообщает о неточных обнаружениях. Для примера, который показывает это поведение, смотрите Обнаружения Датчика Видения Модели.