Считайте ведущий сценарий в модель
Automated Driving Toolbox / Управление Сценарием и Моделирование Датчика
Блок Scenario Reader читает дороги и агентов из файла сценария, созданного с помощью приложения Driving Scenario Designer или из drivingScenario объект. Блок выводит положения агентов или в системе координат автомобиля, оборудованного датчиком или в мировых координатах сценария. Можно также вывести контуры маршрута или вывести положение автомобиля, оборудованного датчиком для использования в 3D среде симуляции. Блок также позволяет выход состояния автомобиля, оборудованного датчиком, которое включает ускоряющие измерения для использования с моделями датчика.
Чтобы сгенерировать объект и обнаружения контура маршрута от выходных положений агента и контуров маршрута, передайте положение и контур выходные параметры с блоками датчика. Используйте синтетические обнаружения, сгенерированные от этих датчиков, чтобы проверить производительность алгоритмов cочетания датчиков, отслеживая алгоритмы и другие алгоритмы автоматизированной ведущей системы помощи (ADAS). Чтобы визуализировать эффективность этих алгоритмов, используйте Bird's-Eye Scope.
Можно считать автомобиль, оборудованный датчиком из сценария или задать автомобиль, оборудованный датчиком, заданный в модели как вход с блоком Scenario Reader. Используйте эту опцию, чтобы протестировать алгоритмы регулятора транспортного средства с обратной связью, такие как автономное экстренное торможение (AEB), хранение маршрута помогает (LKA) или адаптивный круиз-контроль (ACC).
Блок Scenario Reader не считывает данные о датчике из файлов сценария, сохраненных из приложения Driving Scenario Designer. Воспроизвести датчики в Simulink®, в приложении откройте файл сценария, который содержит датчики. Затем от панели инструментов приложения выберите Export> Export Sensor Simulink Model. Скопируйте сгенерированные блоки датчика в существующую модель. В качестве альтернативы выберите Export> Export Simulink Model и запустите новую модель со сгенерированного блока Scenario Reader и блоков датчика.
Большие дорожные сети, включая ASAM OpenDRIVE® дорожные сети, может взять до нескольких минут, чтобы читать в модели.
Actors — Положения агента сценарияПоложения агента сценария, возвращенные как шина Simulink, содержащая структуру MATLAB.
Структура имеет эти поля.
| Поле | Описание | Ввод |
|---|---|---|
NumActors | Количество агентов | Неотрицательное целое число |
Time | Текущее время симуляции | Скаляр с действительным знаком |
Actors | Положения агента | NumActors- массив длины агента излагает структуры |
Каждая структура положения агента в Actors имеет эти поля.
| Поле | Описание |
|---|---|
ActorID | Заданный сценарием идентификатор агента в виде положительного целого числа. |
Position | Положение агента в виде вектора с действительным знаком из формы [x y z]. Величины в метрах. |
Velocity | Скорость (v) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [v x v y v z]. Модули исчисляются в метрах в секунду. |
Roll | Крен агента в виде скаляра с действительным знаком. Модули в градусах. |
Pitch | Передайте угол агента в виде скаляра с действительным знаком. Модули в градусах. |
Yaw | Угол рыскания агента в виде скаляра с действительным знаком. Модули в градусах. |
AngularVelocity | Скорость вращения (ω) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [ω x ω y ω z]. Модули в градусах в секунду. |
Положение автомобиля, оборудованного датчиком исключено из Actors массив.
Чтобы возвратить положения агента в блок, необходимо запустить целую ведущую симуляцию сценария к завершению.
Lane Boundaries — Контуры маршрута сценарияКонтуры маршрута сценария, возвращенные как шина Simulink, содержащая структуру MATLAB.
Структура имеет эти поля.
| Поле | Описание | Ввод |
|---|---|---|
NumLaneBoundaries | Количество контуров маршрута | Неотрицательное целое число |
Time | Текущее время симуляции | Действительный скаляр |
LaneBoundaries | Контуры маршрута | NumLaneBoundaries- массив длины граничных структур маршрута |
Каждая граничная структура маршрута в LaneBoundaries имеет эти поля.
| Поле | Описание |
| Контур маршрута координирует в виде N с действительным знаком-by-3 матрицу, где N является количеством координат контура маршрута. Координаты контура маршрута задают положение точек на контуре на заданных продольных расстояниях далеко от автомобиля, оборудованного датчиком вдоль центра дороги.
Эта матрица также включает граничные координаты в нулевое расстояние от автомобиля, оборудованного датчиком. Эти координаты налево и право на источник автомобиля, оборудованного датчиком, который расположен под центром задней оси. Величины в метрах. |
| Искривление контура маршрута для каждой строки Coordinates матрица в виде N с действительным знаком-by-1 вектор. N является количеством координат контура маршрута. Модули исчисляются в радианах на метр. |
| Производная искривления контура маршрута для каждой строки Coordinates матрица в виде N с действительным знаком-by-1 вектор. N является количеством координат контура маршрута. Модули исчисляются в радианах на квадратный метр. |
| Начальный угол рыскания контура маршрута в виде действительного скаляра. Угол рыскания контура маршрута относительно заголовка автомобиля, оборудованного датчиком. Модули в градусах. |
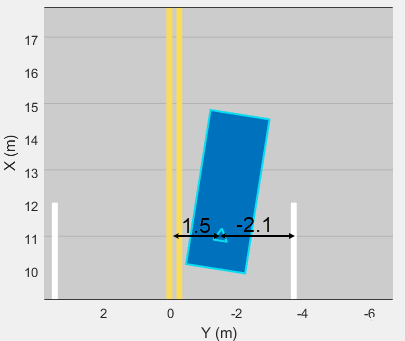
| Боковое смещение положения автомобиля, оборудованного датчиком от контура маршрута в виде действительного скаляра. Смещение к контуру маршрута слева от автомобиля, оборудованного датчиком положительно. Смещение справа от автомобиля, оборудованного датчиком отрицательно. Величины в метрах. В этом изображении автомобиль, оборудованный датчиком возмещен в 1,5 метрах от левого маршрута и в 2,1 метрах от правильного маршрута.
|
| Тип контура маршрута, отмечающего в виде одного из этих значений:
|
| Сила насыщения контура маршрута, отмечающего в виде действительного скаляра от 0 до 1. Значение |
| Ширина контура маршрута в виде положительного действительного скаляра. В маркере маршрута двойной линии та же ширина используется для обеих линий и для пробела между линиями. Величины в метрах. |
| Длина тире в пунктирных линиях в виде положительного действительного скаляра. В маркере маршрута двойной линии та же длина используется для обеих линий. |
| Продолжительность пробела между тире в пунктирных линиях в виде положительного действительного скаляра. В пунктирном маркере маршрута двойной линии то же пространство используется для обеих линий. |
Количество возвращенных граничных структур маршрута зависит от значения параметров Lane boundaries to output.
Чтобы включить этот порт, установите эти параметры в этом порядке:
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Установите параметр Lane boundaries to output на Ego lane boundaries или All lane boundaries.
Ego Vehicle Pose — Положение автомобиля, оборудованного датчикомПоложение автомобиля, оборудованного датчиком, возвращенное как шина Simulink, содержащая структуру MATLAB.
Структура должна содержать эти поля.
| Поле | Описание |
|---|---|
ActorID | Заданный сценарием идентификатор агента в виде положительного целого числа. |
Position | Положение агента в виде вектора с действительным знаком из формы [x y z]. Величины в метрах. |
Velocity | Скорость (v) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [v x v y v z]. Модули исчисляются в метрах в секунду. |
Roll | Крен агента в виде скаляра с действительным знаком. Модули в градусах. |
Pitch | Передайте угол агента в виде скаляра с действительным знаком. Модули в градусах. |
Yaw | Угол рыскания агента в виде скаляра с действительным знаком. Модули в градусах. |
AngularVelocity | Скорость вращения (ω) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [ω x ω y ω z]. Модули в градусах в секунду. |
Чтобы включить этот порт, установите эти параметры в этом порядке:
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Установите параметр Source of ego vehicle на Scenario.
Выберите параметр Output ego vehicle pose.
Ego Vehicle State — Состояние автомобиля, оборудованного датчикомСостояние автомобиля, оборудованного датчиком, возвращенное как шина Simulink, содержащая структуру MATLAB.
Структура должна содержать эти поля.
| Поле | Описание |
|---|---|
Position | Положение агента в виде вектора с действительным знаком из формы [x y z]. Величины в метрах. |
Velocity | Скорость (v) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [v x v y v z]. Модули исчисляются в метрах в секунду. |
Orientation | Ориентация агента в виде вектора с действительным знаком из [ |
AngularVelocity | Скорость вращения (ω) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [ω x ω y ω z]. Модули в градусах в секунду. |
Acceleration | Ускорение (a) агента в x - y - и z - направления в виде вектора с действительным знаком из формы [a x a y a z]. Модули исчисляются в метрах в секунду в квадрате. |
Чтобы включить этот порт, установите эти параметры в этом порядке:
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Установите параметр Source of ego vehicle на Scenario.
Выберите параметр Output ego vehicle state.
Source of driving scenario — Источник ведущего сценарияFrom file (значение по умолчанию) | From workspaceИсточник ведущего сценария в виде одной из этих опций:
From file — В параметре Driving Scenario Designer file name задайте имя файла сценария, который был сохранен из приложения Driving Scenario Designer.
From workspace — В параметре MATLAB or model workspace variable name задайте имя рабочего пространства MATLAB или переменной рабочего пространства модели, которая содержит drivingScenario объект.
Driving Scenario Designer file name — Имя файла сценарияEgoVehicleGoesStraight.mat (значение по умолчанию) | файл сценария на пути поиска файлов MATLAB | путь к файлу сценарияИмя файла сценария в виде файла сценария на пути поиска файлов MATLAB или как полный путь к файлу сценария. Файлом сценария должен быть MAT-файл, сохраненный из приложения Driving Scenario Designer. Если параметр Source of ego vehicle устанавливается на Scenario, затем сценарий должен содержать автомобиль, оборудованный датчиком. В противном случае блок возвращает ошибку в процессе моделирования.
Если заданный файл сценария содержит датчики, блок игнорирует их. Чтобы включать датчики из сценария в вашей модели, смотрите Советы.
Файл сценария по умолчанию показывает автомобиль, оборудованный датчиком, перемещаясь на север на прямой, дороге 2D маршрута с другим транспортным средством, перемещаясь на юг в противоположном маршруте.
Чтобы добавить файл сценария в путь поиска файлов MATLAB, используйте addpath функция. Например, этот код добавляет набор папок, содержащих предварительно созданный Евро NCAP® сценарии к пути поиска файлов MATLAB.
path = fullfile(matlabroot,'toolbox','driving','drivingdata', ... 'PrebuiltScenarios','EuroNCAP'); addpath(genpath(path))
В параметре Driving Scenario Designer file name можно затем задать имя любого сценария, расположенного в этих папках, не имея необходимость задавать полный путь к файлу. Например: AEB_PedestrianChild_Nearside_50width.mat.
Когда вы закончите с помощью сценария в моделях, можно удалить любые добавленные папки из пути поиска файлов MATLAB при помощи rmpath функция.
rmpath(genpath(path))
Чтобы включить этот параметр, установите параметр Source of driving scenario на From file.
MATLAB or model workspace variable name — Имя переменной сценарияscenario (значение по умолчанию) | drivingScenario имя переменной объектаИмя переменной сценария в виде имени рабочего пространства MATLAB или переменной рабочего пространства модели, которая содержит допустимый drivingScenario объект. Если переменная сценария с тем же именем появляется и в рабочем пространстве MATLAB и в рабочем пространстве модели, блок использует переменную, заданную в рабочем пространстве модели.
Если параметр Source of ego vehicle устанавливается на Scenario, затем drivingScenario объект должен содержать автомобиль, оборудованный датчиком. Чтобы определять, какой агент в объекте является автомобилем, оборудованным датчиком в параметре Ego vehicle ActorID, задают ActorID значение свойства того агента.
Имя переменной по умолчанию, scenario, имя по умолчанию drivingScenario объекты, произведенные функциями MATLAB, которые экспортируются из приложения Driving Scenario Designer. По умолчанию эта переменная не включена в рабочее пространство MATLAB или рабочее пространство модели.
Чтобы включить этот параметр, установите параметр Source of driving scenario на From workspace.
Coordinate system of actors output — Система координат агентов выводитсяVehicle coordinates (значение по умолчанию) | World coordinatesСистема координат выходных агентов в виде одного из этих значений:
Vehicle coordinates — Координаты заданы относительно автомобиля, оборудованного датчиком. Выберите это значение, когда ваш сценарий будет иметь только один автомобиль, оборудованный датчиком.
World coordinates — Координаты заданы относительно ведущего сценария. Выберите это значение в сценариях мультиагента, которые содержат больше чем один автомобиль, оборудованный датчиком. Если вы выбираете это значение, визуализация модели с помощью Bird's-Eye Scope не поддерживается.
Для получения дополнительной информации о транспортном средстве и системах мировой координаты, смотрите Системы координат в Automated Driving Toolbox.
Source of ego vehicle — Источник автомобиля, оборудованного датчикомScenario (значение по умолчанию) | Input portИсточник автомобиля, оборудованного датчиком в виде одной из этих опций:
Scenario — Используйте автомобиль, оборудованный датчиком, заданный в сценарии, который задан параметром MATLAB or model workspace variable name или Driving Scenario Designer file name. Положение автомобиля, оборудованного датчиком исключено из выходного порта Actors. Положения агента находятся в координатах транспортного средства, означая, что они относительно положения мировой координаты автомобиля, оборудованного датчиком в сценарии.
Выберите эту опцию, чтобы протестировать алгоритмы ADAS разомкнутого контура, где поведение автомобиля, оборудованного датчиком предопределено и не изменяется, когда сценарий совершенствуется. Для примера см., что Тестовый Алгоритм ADAS Разомкнутого контура Использует Ведущий Сценарий.
Input port — Задайте автомобиль, оборудованный датчиком при помощи входного порта Ego Vehicle. Положение автомобиля, оборудованного датчиком не включено в выходной порт Actors.
При использовании этой опции автомобиль, оборудованный датчиком в вашей модели должен включать стартовую позицию, которая находится в мировых координатах. Все другие положения агента находятся в координатах транспортного средства и расположены относительно автомобиля, оборудованного датчиком. Для примера автомобиля, оборудованного датчиком с заданной информацией о положении смотрите, что Маршрут Сохранить Помогает с Обнаружением Маршрута. При определении стартовой позиции автомобиля, оборудованного датчиком рассмотрите использование положения, которое уже задано в сценарии. При помощи этого положения, если вы устанавливаете Source of ego vehicle на Scenario и затем обратно к Input port, вы не должны вручную менять стартовое положение.
Выберите эту опцию, чтобы протестировать алгоритмы ADAS с обратной связью, где автомобиль, оборудованный датчиком реагирует на изменения, когда сценарий совершенствуется. Для примера смотрите Тест Алгоритм ADAS С обратной связью Используя Управление Сценарием.
Чтобы включить этот параметр, установите параметр Coordinate system of actors output на Vehicle coordinates.
Ego vehicle ActorID — ID агента автомобиля, оборудованного датчикомID агента автомобиля, оборудованного датчиком в виде положительного целого числа. Используйте этот параметр, чтобы симулировать использование автомобиля, оборудованного датчиком, который читается из drivingScenario объект.
Когда Source of ego vehicle установлен в Scenario, установите этот параметр на ActorID значение, которое хранится в Actors свойство заданного drivingScenario объект. Проверять допустимый ActorID значения, используйте этот синтаксис, где scenario имя drivingScenario имя переменной.
actorIDs = [scenario.Actors.ActorID]
Когда Source of ego vehicle установлен в Input Port, необходимо установить этот параметр на ActorID значение во входном порту Ego Vehicle блока.
Чтобы включить этот параметр, установите эти параметры в этом порядке:
Установите параметр Source of driving scenario на From workspace.
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Output ego vehicle pose — Выведите положение автомобиля, оборудованного датчикомoff (значение по умолчанию) | onВыберите этот параметр, чтобы вывести положение автомобиля, оборудованного датчиком в порте Ego Vehicle Pose.
Чтобы включить этот параметр, установите параметр Coordinate system of actors output на Vehicle coordinates и параметр Source of ego vehicle к Scenario.
Output ego vehicle state — Состояние вывода автомобиля, оборудованного датчикомoff (значение по умолчанию) | onВыберите этот параметр, чтобы вывести состояние автомобиля, оборудованного датчиком в порте Ego Vehicle State.
Чтобы включить этот параметр, установите параметр Coordinate system of actors output на Vehicle coordinates и параметр Source of ego vehicle к Scenario.
Чтобы вывести состояние автомобиля, оборудованного датчиком, необходимо создать траекторию автомобиля, оборудованного датчиком с помощью smoothTrajectory функция в ведущем API сценария или путем выбора параметра Use smooth, jerk-limited trajectory в приложении Driving Scenario Designer.
Ego vehicle follows ground — Восточный автомобиль, оборудованный датчиком, чтобы следовать за дорожным покрытиемoff (значение по умолчанию) | onВыберите этот параметр, чтобы ориентировать автомобиль, оборудованный датчиком, чтобы следовать за вертикальным изменением дорожного покрытия. Блок обновляет вертикальное изменение, крен, тангаж и рыскание автомобиля, оборудованного датчиком и выходных агентов и контуров маршрута относительно обновленных координат автомобиля, оборудованного датчиком. Блок не обновляет скорость или скорость вращения автомобиля, оборудованного датчиком.
Используйте этот параметр в симуляциях с обратной связью, где вертикальное изменение дорожной сети варьируется.
Примечание
На перекрестках дорог, которые имеют различные вертикальные изменения и банковские углы, обновленные значения автомобиля, оборудованного датчиком не могут быть точными.
В симуляциях разомкнутого контура, где Source of ego vehicle установлен в Scenario, автомобиль, оборудованный датчиком следует за вертикальным изменением, заданным в ведущем сценарии.
Чтобы включить этот параметр, установите Coordinate system of actors output на Vehicle coordinates и Source of ego vehicle к Input port.
Sample time (s) — Шаг расчета симуляцииШаг расчета симуляции, в секундах в виде положительного действительного скаляра. Времена наследованной и непрерывной выборки не поддерживаются. Этот шаг расчета является отдельным от шагов расчета что приложение Driving Scenario Designer и drivingScenario возразите использованию в процессе моделирования.
Lane boundaries to output — Контуры маршрута, чтобы вывестиNone (значение по умолчанию) | Ego vehicle lane boundaries | All lane boundariesКонтуры маршрута, чтобы вывести в виде одной из этих опций:
None — Не выводите контуры маршрута.
Ego vehicle lane boundaries — Выведите левые и правые контуры маршрута автомобиля, оборудованного датчиком.
All lane boundaries — Выведите все контуры маршрута дороги, на которой перемещается автомобиль, оборудованный датчиком.
Если вы выбираете Ego vehicle lane boundaries или All lane boundaries, затем блок возвращает контуры маршрута в выходном порту Lane Boundaries.
Чтобы включить этот параметр, установите параметр Coordinate system of actors output на Vehicle coordinates.
Distances from ego vehicle for computing boundaries (m) — Расстояния от автомобиля, оборудованного датчиком, в котором можно вычислить контуры маршрутаlinspace(-150,150,101) (значение по умолчанию) | N - элемент вектор с действительным знакомРасстояния от автомобиля, оборудованного датчиком, в котором можно вычислить контуры маршрута в виде N - элемент вектор с действительным знаком. N является количеством значений расстояния. При обнаружении маршрутов от камер, расположенных "против движения", задайте отрицательные расстояния. При обнаружении маршрутов от обращенных к передней стороне камер задайте положительные расстояния. Величины в метрах.
По умолчанию блок вычисляет 101 контур маршрута по диапазону от 150 метров позади автомобиля, оборудованного датчиком к 150 метрам перед автомобилем, оборудованным датчиком. Эти расстояния линейно расположены с интервалами на расстоянии в 3 метра.
Пример: 1:0.1:10 вычисляет контур маршрута каждый 0,1 метра по диапазону от 1 до 10 метров перед автомобилем, оборудованным датчиком.
Чтобы включить этот параметр, установите параметр Lane boundaries to output на Ego vehicle lane boundaries или All lane boundaries.
Location of boundaries on lane markings — Местоположение контура маршрутаCenter of lane markings (значение по умолчанию) | Inner edge of lane markingsМестоположение контура маршрута на маркировках маршрута в виде одной из опций в этой таблице.
| Местоположение контура маршрута | Описание | Пример |
|---|---|---|
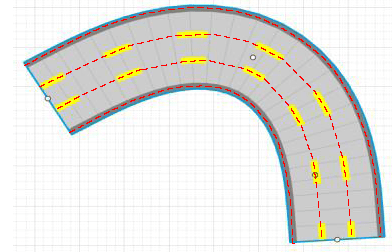
Center of lane markings | Контуры маршрута сосредоточены на маркировках маршрута. | Трехполосная дорога имеет четыре контура маршрута: один на маркировку маршрута.
|
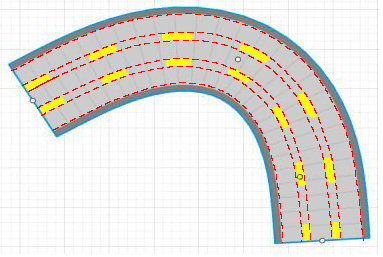
Inner edge of lane markings | Контуры маршрута помещаются во внутренние края маркировок маршрута. | Трехполосная дорога имеет шесть контуров маршрута: два на маршрут.
|
Чтобы включить этот параметр, установите параметр Lane boundaries to output на Ego vehicle lane boundaries или All lane boundaries.
Source of actors bus name — Источник имени для агента излагает шинуAuto (значение по умолчанию) | PropertyИсточник имени для агента излагает шину, возвращенную в выходном порту Actors в виде одной из этих опций:
Auto — Блок автоматически создает имя шины положений агента.
Property — Задайте имя шины положений агента при помощи параметра Actors bus name.
Actors bus name — Имя агента излагает шинуИмя агента излагает шину, возвращенную в выходном порту Actors в виде допустимого имени шины.
Чтобы включить этот параметр, установите Source of actors bus name на Property.
Source of maximum number of actors — Источник максимального количества агентовScenario (значение по умолчанию) | PropertyИсточник максимального количества агентов, которых вы можете иметь в ведущем сценарии в виде одной из этих опций:
Scenario — Блок определяет максимальный номер агентов к количеству агентов в ведущем сценарии. Это значение равно NumActors поле шины возвращено выходным портом Actors. Когда вы изменяете входной сценарий, максимальное количество агентов обновляется, чтобы совпадать с новым NumActors значение.
Property — Задайте максимальное количество агентов при помощи параметра Maximum number of actors. Выберите эту опцию, когда это необходимо, чтобы снова использовать ту же шину агента через сценарии, которые имеют различные количества агентов, такой, выводя агентов из модели, на которую ссылаются.
Maximum number of actors — Максимальное количество агентовМаксимальное количество агентов, которых вы можете иметь в сценарии в виде положительного целого числа.
Чтобы включить этот параметр, установите параметр Source of maximum number of actors на Property.
Source of lane boundaries bus name — Источник имени для шины контуров маршрутаAuto (значение по умолчанию) | PropertyИсточник имени для шины контуров маршрута, возвращенной в выходном порту Lane Boundaries в виде одной из этих опций:
Auto — Блок автоматически создает имя шины контуров маршрута.
Property — Задайте имя шины контуров маршрута при помощи параметра Lane boundaries bus name.
Включить этот параметр:
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Установите параметр Lane boundaries to output на Ego vehicle lane boundaries или All lane boundaries.
Lane boundaries bus name — Имя шины контуров маршрутаИмя шины контуров маршрута, возвращенной в выходном порту Lane Boundaries в виде допустимого имени шины.
Включить этот параметр:
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Установите параметр Lane boundaries to output на Ego vehicle lane boundaries или All lane boundaries.
Установите параметр Source of lane boundaries bus name на Property.
Source of maximum number of lane boundaries — Источник максимального количества контуров маршрутаScenario (значение по умолчанию) | PropertyИсточник максимального количества контуров маршрута, которые вы можете иметь в ведущем сценарии в виде одной из этих опций:
Scenario — Блок определяет максимальный номер контуров маршрута к количеству контуров маршрута в ведущем сценарии. Это значение равно NumLaneBoundaries поле шины возвращено выходным портом Lane Boundaries. Когда вы изменяете входной сценарий, максимальное количество контуров маршрута обновляется, чтобы совпадать с новым NumLaneBoundaries значение.
Property — Задайте максимальное количество контуров маршрута при помощи параметра Maximum number of lane boundaries. Выберите эту опцию, когда это необходимо, чтобы снова использовать ту же шину контуров маршрута через сценарии, которые имеют различные количества контуров маршрута, такой, выводя контуры маршрута из модели, на которую ссылаются.
Включить этот параметр:
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Установите параметр Lane boundaries to output на All lane boundaries.
Maximum number of lane boundaries — Максимальное количество контуров маршрутаМаксимальное количество контуров маршрута, которые вы можете иметь в сценарии в виде положительного целого числа.
Включить этот параметр:
Установите параметр Coordinate system of actors output на Vehicle coordinates.
Установите параметр Lane boundaries to output на All lane boundaries.
Установите параметр Source of maximum number of lane boundaries на Property.
Source of ego vehicle pose bus name — Источник имени для автомобиля, оборудованного датчиком излагает шинуAuto (значение по умолчанию) | PropertyИсточник имени для автомобиля, оборудованного датчиком излагает шину, возвращенную в выходном порту Ego Vehicle Pose в виде одной из этих опций:
Auto — Блок автоматически создает имя шины положения автомобиля, оборудованного датчиком.
Property — Задайте имя шины положения автомобиля, оборудованного датчиком при помощи параметра Ego vehicle pose bus name.
Чтобы включить этот параметр, выберите параметр Output ego vehicle pose.
Ego vehicle pose bus name — Имя автомобиля, оборудованного датчиком излагает шинуИмя автомобиля, оборудованного датчиком излагает шину, возвращенную в выходном порту Ego Vehicle Pose в виде допустимого имени шины.
Чтобы включить этот параметр, выберите параметр Output ego vehicle pose и установите параметр Source of ego vehicle pose bus name на Property.
Source of ego vehicle state bus name — Источник имени для автомобиля, оборудованного датчиком утверждает шинуAuto (значение по умолчанию) | PropertyИсточник имени для автомобиля, оборудованного датчиком утверждает шину, возвращенную в выходном порту Ego Vehicle State в виде одной из этих опций:
Auto — Блок автоматически создает имя шины состояния автомобиля, оборудованного датчиком.
Property — Задайте имя шины состояния автомобиля, оборудованного датчиком при помощи параметра Ego vehicle state bus name.
Чтобы включить этот параметр, выберите параметр Output ego vehicle state.
Ego vehicle state bus name — Имя автомобиля, оборудованного датчиком утверждает шинуИмя автомобиля, оборудованного датчиком утверждает шину, возвращенную в выходном порту Ego Vehicle State в виде допустимого имени шины.
Чтобы включить этот параметр, выберите параметр Output ego vehicle state и установите параметр Source of ego vehicle state bus name на Property.
Show coordinate labels — Отобразите систему координат вводов и выводовon (значение по умолчанию) | offВыберите этот параметр, чтобы отобразить систему координат вводов и выводов блока на блоке Scenario Reader в блок-схеме.
Ввод и вывод Ego Vehicle всегда находится в мировых координатах.
Lane Boundaries выход всегда находится в координатах транспортного средства.
Можно возвратить Actors выход или в транспортном средстве или в мировых координатах, в зависимости от выбора параметра Coordinate system of actors output.
Для лучших результатов используйте только один активный блок Scenario Reader на модель. Чтобы использовать несколько блоков Читателя Сценария в одной модели, переключитесь между блоками путем определения их в различной подсистеме.
Чтобы протестировать ваш алгоритм на изменениях ведущего сценария, можно обновить сценарий между симуляциями.
Если источник сценария является файлом сценария, откройте файл сценария в приложении Driving Scenario Designer, обновите параметры и повторно сохраните файл.
Если источником сценария является drivingScenario объект, обновите объект в рабочем пространстве MATLAB или рабочем пространстве модели. В качестве альтернативы импортируйте объект в приложение, измените сценарий в приложении, и затем сгенерируйте новый объект из приложения. Для получения дополнительной информации смотрите, Создают Ведущие Изменения Сценария Программно.
Чтобы переключиться между сценариями с различными установками параметров, можно использовать программное обеспечение Simulink Test™. Для примера смотрите, Автоматизируют Тестирование на Хайвея Лейна После.