Спроектируйте ведущие сценарии, сконфигурируйте датчики и сгенерируйте синтетические данные
Приложение Driving Scenario Designer позволяет вам спроектировать синтетический продукт ведущие сценарии для тестирования ваших систем автономного управления автомобилем.
Используя приложение, вы можете:
Крит-Роуд и модели агента с помощью интерфейса перетаскивания.
Сконфигурируйте видение, радар, лидар и датчики INS, смонтированные на автомобиле, оборудованном датчиком. Можно использовать эти датчики, чтобы сгенерировать агента и обнаружения контура маршрута, данные об облаке точек и инерционные измерения.
Загрузите ведущие сценарии, представляющие европейскую Новую Автомобильную Программу Оценки (Евро NCAP®) протестируйте протоколы [1][2][3] и другие предварительно созданные сценарии.
Импортируйте ASAM OpenDRIVE® дороги и маршруты в ведущий сценарий. Поддержки приложений OpenDRIVE® версии файла 1.4 и 1.5, а также версия файла 1.6 ASAM OpenDRIVE.
Импортируйте дорожные данные от OpenStreetMap®, HD HERE живая карта [1] , или Zenrin API 3.0 карты Японии (Itsumo NAVI API 3.0) [2] веб-сервисы в ведущий сценарий.
При импортировании данных от API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) сервис требует Средства импорта Automated Driving Toolbox для API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) Сервис.
Экспортируйте дорожную сеть в ведущем сценарии к формату файла ASAM OpenDRIVE. Поддержки приложений версии файла 1.4 и 1.5 OpenDRIVE, а также версия файла 1.6 ASAM OpenDRIVE.
Экспортируйте дорожную сеть, агентов и траектории в ведущем сценарии к ASAM OpenSCENARIO® 1,0 формата файла.
Экспортируйте синтетические обнаружения датчика в MATLAB®.
Сгенерируйте код MATLAB сценария и датчиков, и затем программно измените сценарий и импортируйте его назад в приложение для дальнейшей симуляции.
Сгенерируйте Simulink® модель из сценария и датчиков и использования сгенерированные модели, чтобы протестировать ваше cочетание датчиков или алгоритмы управления транспортного средства.
Чтобы узнать больше о приложении, посмотрите эти видео:
Панель инструментов MATLAB: На вкладке Apps, под Automotive, кликают по значку приложения.
Командная строка MATLAB: Войти drivingScenarioDesigner.
Создайте ведущий сценарий транспортного средства, едущего по кривой дороге, и экспортируйте дорогу и модели транспортных средств к рабочему пространству MATLAB. Для более подробного примера создания ведущего сценария смотрите, Создают Ведущий Сценарий В интерактивном режиме и Генерируют Синтетические Данные о Датчике.
Откройте приложение Driving Scenario Designer.
drivingScenarioDesigner
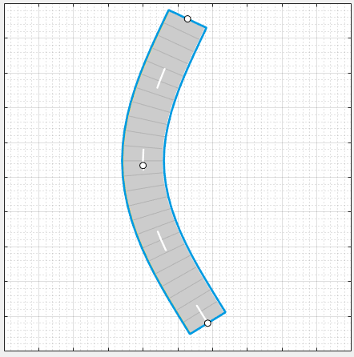
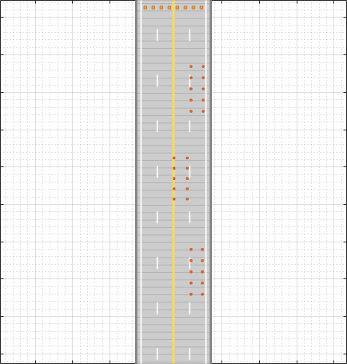
Создайте кривую дорогу. На панели инструментов приложения нажмите Add Road. Кликните по нижней части холста, расширьте дорожный путь к середине холста и кликните по холсту снова. Расширьте дорожный путь к верхней части холста, и затем дважды кликните, чтобы создать дорогу. Чтобы сделать кривую более комплексной, перетащите дорожные центры (открытые круги), дважды кликните дорогу, чтобы добавить больше дорожных центров или дважды кликнуть запись в направляющемся (°) столбец таблицы Road Centers, чтобы задать угол рыскания как ограничение к дорожной центральной точке.
Добавьте маршруты в дорогу. На левой панели, на вкладке Roads, расширяют раздел Lanes. Установите Number of Lanes на 2. По умолчанию дорога является односторонней и имеет серьезные маркировки маршрута с обеих сторон, чтобы указать на плечо.
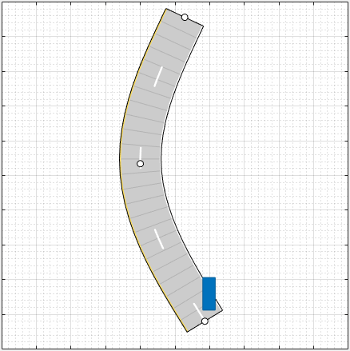
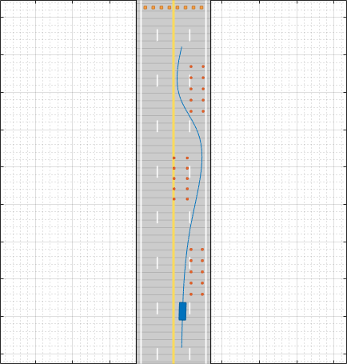
Добавьте транспортное средство в одном конце дороги. На панели инструментов приложения выберите Add Actor> Car. Затем кликните по дороге, чтобы установить исходное положение автомобиля.
Установите ведущую траекторию автомобиля. Щелкните правой кнопкой по автомобилю, выберите Add Forward Waypoints и добавьте waypoints для автомобиля, чтобы пройти. После того, как вы добавите последний waypoint, нажмите Enter. Автомобиль самовращается в направлении первого waypoint.
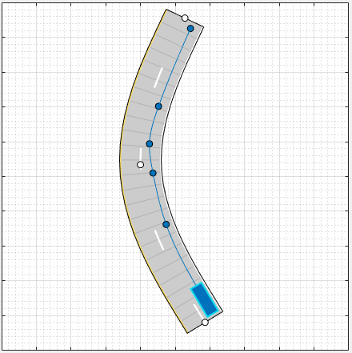
Настройте скорость автомобиля, когда это передает между waypoints. В таблице Waypoints, Speeds, Wait Times, and Yaw на левой панели, устанавливает скорость, v (m/s), автомобиля, оборудованного датчиком, когда это вводит каждый waypoint сегмент. Увеличьте скорость автомобиля для прямых сегментов и уменьшите его скорость для изогнутых сегментов. Например, траектория имеет шесть waypoints, установите ячейки v (m/s) на 30, 20, 15, 15, 20, и 30.
Запустите сценарий и настройте настройки по мере необходимости. Затем нажмите Save> Roads & Actors, чтобы сохранить дорогу и модели автомобилей к файлу MAT.
Сгенерируйте данные об облаке точек лидара из предварительно созданного Евро NCAP ведущий сценарий.
Для получения дополнительной информации о предварительно созданных сценариях, доступных из приложения, см. Предварительно созданные Ведущие Сценарии в Driving Scenario Designer.
Для получения дополнительной информации о доступном Евро сценарии NCAP смотрите Евро NCAP Управление Сценариями в Driving Scenario Designer.
Загрузите Евро сценарий автономного экстренного торможения (AEB) NCAP столкновения с пешеходным дочерним элементом. Во время столкновения точка падения ракеты происходит 50% пути через ширину автомобиля.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario', ... 'PrebuiltScenarios','EuroNCAP'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('AEB_PedestrianChild_Nearside_50width.mat') rmpath(path) % Remove folder from path
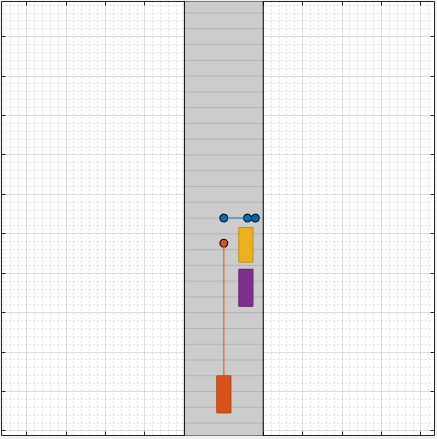
Добавьте датчик лидара в автомобиль, оборудованный датчиком. Сначала нажмите Add Lidar. Затем на Sensor Canvas кликните по предопределенному местоположению датчика в центре крыши автомобиля. Датчик лидара появляется в черном цвете в предопределенном местоположении. Серый цвет, который окружает автомобиль, является зоной охвата датчика.
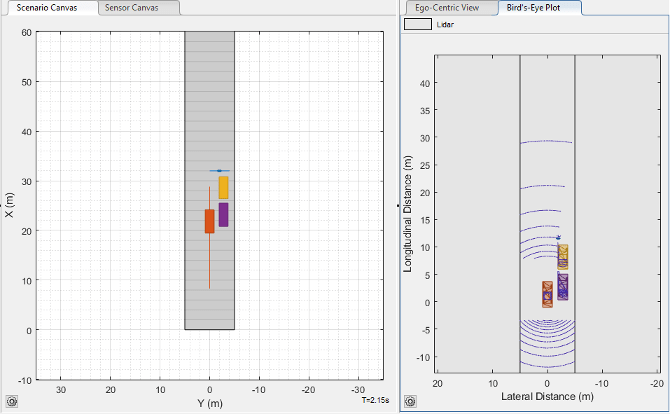
Запустите сценарий. Смотрите различные аспекты сценария путем переключения между холстами и представлениями. Можно переключиться между Sensor Canvas и Scenario Canvas и между Bird's-Eye Plot и Ego-Centric View.
В Bird's-Eye Plot и Ego-Centric View, агенты отображены как сетки вместо как кубоиды. Чтобы изменить настройки отображения, используйте опции Display на панели инструментов приложения.
Экспортируйте данные о датчике в рабочее пространство MATLAB. Нажмите Export > Export Sensor Data, введите имя переменной рабочей области и нажмите OK.
Программно создайте ведущий сценарий, радарный датчик и датчик камеры. Затем импортируйте сценарий и датчики в приложение. Для получения дополнительной информации о работе с программируемыми ведущими сценариями и датчиками, смотрите, Создают Ведущие Изменения Сценария Программно.
Создайте простой ведущий сценарий при помощи drivingScenario объект. В этом сценарии автомобиль, оборудованный датчиком перемещается прямо на 50-метровом дорожном сегменте на постоянной скорости 30 метров в секунду. Для автомобиля, оборудованного датчиком задайте ClassID свойство 1. Это значение соответствует приложению Class ID 1, который отсылает к агентам класса Car. Для получения дополнительной информации о том, как приложение задает классы, см. описание параметра Class во вкладке параметра Агентов.
scenario = drivingScenario; roadCenters = [0 0 0; 50 0 0]; road(scenario,roadCenters); egoVehicle = vehicle(scenario,'ClassID',1,'Position',[5 0 0]); waypoints = [5 0 0; 45 0 0]; speed = 30; smoothTrajectory(egoVehicle,waypoints,speed)
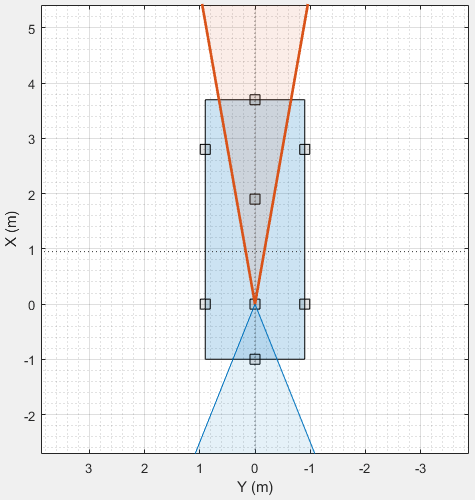
Создайте радарный датчик при помощи drivingRadarDataGenerator объект, и создает датчик камеры при помощи visionDetectionGenerator объект. Поместите оба датчика в начале координат транспортного средства с радарным направлением вперед и камерой, стоящей назад.
radar = drivingRadarDataGenerator('MountingLocation',[0 0 0]); camera = visionDetectionGenerator('SensorLocation',[0 0],'Yaw',-180);
Импортируйте сценарий, обращенный к передней стороне радарный датчик и датчик камеры, расположенный "против движения", в приложение.
drivingScenarioDesigner(scenario,{radar,camera})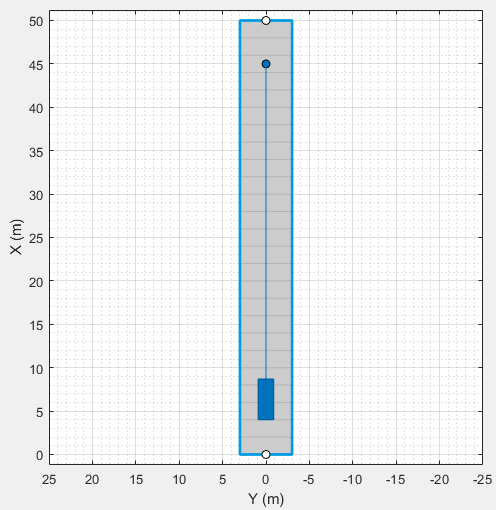
Можно затем запустить сценарий и изменить сценарий и датчики. Сгенерировать новый drivingScenario, drivingRadarDataGenerator, и visionDetectionGenerator объекты, на панели инструментов приложения, выбирают Export> Export MATLAB Function, и затем запускают сгенерированную функцию.
Загрузите ведущий сценарий, содержащий датчик, и сгенерируйте модель Simulink из сценария и датчика. Для более подробного примера при генерации моделей Simulink из приложения смотрите, Генерируют Блоки Датчика Используя Driving Scenario Designer.
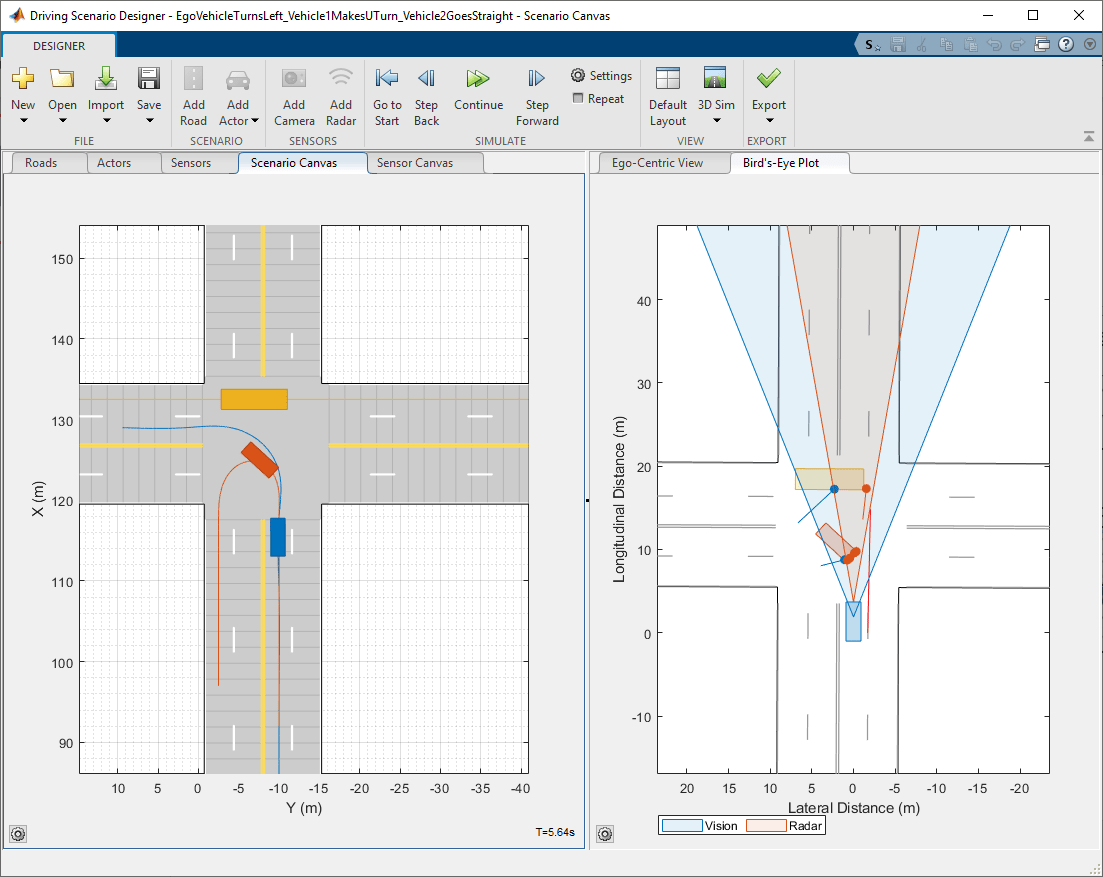
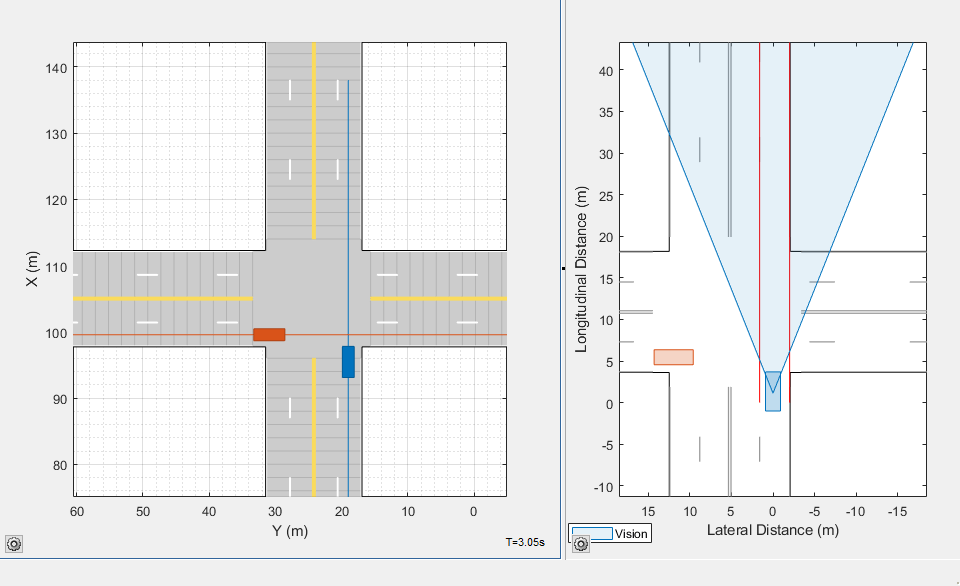
Загрузите предварительно созданный ведущий сценарий в приложение. Сценарий содержит два транспортных средства, пересекающиеся через пересечение. Автомобиль, оборудованный датчиком перемещается на север и содержит датчик камеры. Этот датчик сконфигурирован, чтобы обнаружить и объекты и маршруты.
path = fullfile(matlabroot,'toolbox','shared','drivingscenario','PrebuiltScenarios'); addpath(genpath(path)) % Add folder to path drivingScenarioDesigner('EgoVehicleGoesStraight_VehicleFromLeftGoesStraight.mat') rmpath(path) % Remove folder from path
Сгенерируйте модель Simulink сценария и датчика. На панели инструментов приложения выберите Export> Export Simulink Model. Если вам предлагают, сохранили файл сценария.
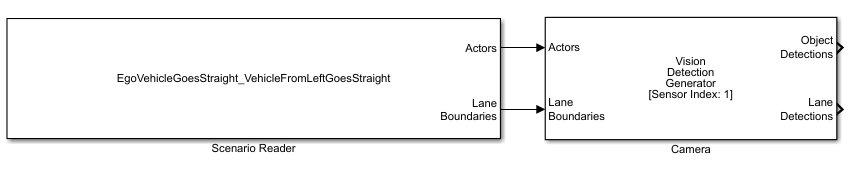
Блок Scenario Reader читает дорогу и агентов из файла сценария. Чтобы обновить данные о сценарии в модели, обновите сценарий в приложении и сохраните файл.
Блок Vision Detection Generator воссоздает датчик камеры, заданный в приложении. Чтобы обновить датчик в модели, обновите датчик в приложении, выберите Export> Export Sensor Simulink Model и скопируйте недавно сгенерированный блок датчика в модель. Если вы обновили какие-либо дороги или агентов при обновлении датчиков то выберите Export> Export Simulink Model. В этом случае блок Scenario Reader точно считывает данные о профиле агента и передает их датчику.
Создайте сценарий с траекториями транспортного средства, которые можно позже воссоздать в Simulink для симуляции в 3D среде.
Откройте один из предварительно созданных сценариев, который воссоздает сцену по умолчанию, доступную через 3D среду. На панели инструментов приложения выберите Open> Prebuilt Scenario> Simulation3D и выберите сценарий. Например, выберите DoubleLaneChange.mat сценарий.
Задайте транспортное средство и его траекторию.
Обновите размерности транспортного средства, чтобы совпадать с размерностями предопределенных типов транспортного средства в 3D среде симуляции.
На вкладке Actors выберите опцию 3D Display Type, которую вы хотите.
На панели инструментов приложения выберите 3D Display> Use 3D Simulation Actor Dimensions. В Scenario Canvas размерности агента обновляются, чтобы совпадать с предопределенными размерностями агентов в 3D среде симуляции.
Предварительно просмотрите, как сценарий будет выглядеть, когда вы позже воссоздадите его в Simulink. На панели инструментов приложения выберите 3D Display> View Simulation in 3D Display. После того, как 3D окно экрана открывается, нажмите Run.
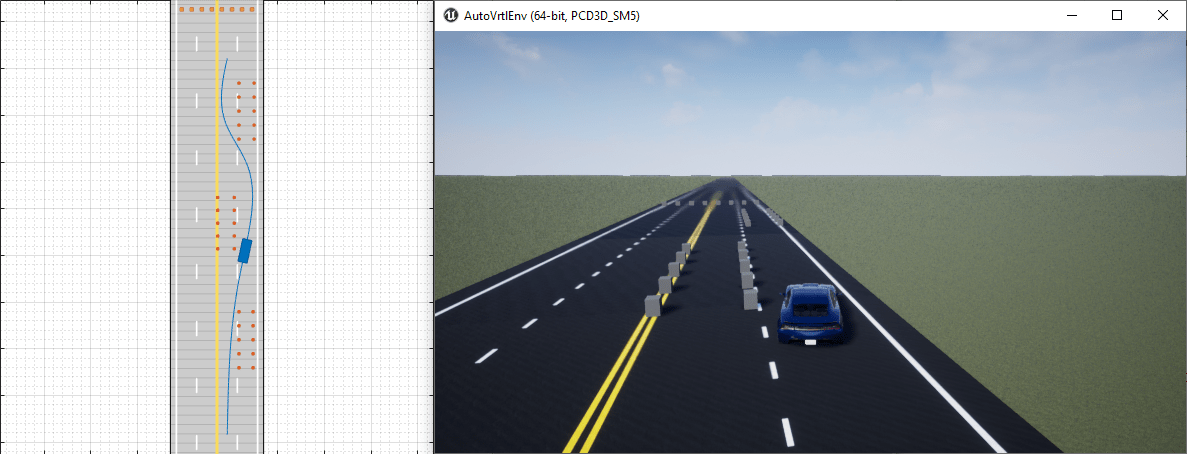
Модифицируйте транспортное средство и траекторию по мере необходимости. Постарайтесь не изменять дорожную сеть или агентов, которые были предопределены в сценарии. В противном случае сценарий приложения не будет совпадать со сценарием, который вы позже воссоздаете в Simulink. Если вы изменяете сценарий, 3D завершения окна экрана.
Когда вы закончите изменяя сценарий, можно воссоздать его в модели Simulink для использования в 3D среде симуляции. Для примера, который показывает, как настроить такую модель, смотрите, Визуализируют Данные о Датчике из Нереальной Среды симуляции Engine.
Roads — Дорожная ширина, угол крена, угол рыскания, технические требования маршрута и дорога сосредотачивают местоположенияЧтобы включить параметры Roads, добавьте по крайней мере одну дорогу к сценарию. Затем выберите дорогу или из Scenario Canvas или из параметра Road. Значения параметров во вкладке Roads основаны на дороге, которую вы выбираете.
| Параметр | Описание |
|---|---|
| Road | Дорога, чтобы изменить в виде списка дорог в сценарии. |
| Name | Имя дороги. Имя импортированной дороги зависит от картографического сервиса. Например, когда вы генерируете использование дороги данные OpenStreetMap, приложение использует имя дороги, когда это доступно. В противном случае приложение использует дорожный ID, заданный данными OpenStreetMap. |
| Width (m) | Ширина дороги, в метрах в виде десятичного скаляра в области значений (0, 50]. Если искривление дороги слишком резко, чтобы вместить заданную дорожную ширину, приложение не генерирует дорогу. Значение по умолчанию: |
| Number of Road Segments | Количество дорожных сегментов в виде положительного целого числа. Используйте этот параметр, чтобы включить составную спецификацию маршрута путем деления дороги на дорожные сегменты. Каждый дорожный сегмент представляет часть дороги с отличной спецификацией маршрута. Технические требования маршрута отличаются от одного дорожного сегмента до другого. Для получения дополнительной информации о составных технических требованиях маршрута см. Составную Спецификацию Маршрута. Значение по умолчанию: |
| Segment Range | Нормированная область значений для каждого дорожного сегмента в виде вектора-строки из значений в области значений (0, 1). Длина вектора должна быть равна значению параметров Number of Road Segments. Сумма вектора должна быть равна По умолчанию область значений каждого дорожного сегмента является инверсией количества дорожных сегментов. Зависимости Чтобы включить этот параметр, задайте значение параметров Number of Road Segments, больше, чем |
| Road Segment | Выберите дорожный сегмент из списка, чтобы задать его параметры Lanes. Зависимости Чтобы включить этот параметр, задайте значение параметров Number of Road Segments, больше, чем |
Lanes — Технические требования маршрута, такие как типы маршрута и маркировки маршрутаИспользуйте эти параметры, чтобы указать информацию маршрута, такую как типы маршрута и маркировки маршрута. Когда значение параметра Number of Road Segments больше 1, эти параметры применяются к выбранному дорожному сегменту.
| Параметр | Описание | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Number of Lanes | Количество маршрутов на дороге в виде одного из этих значений:
Если вы увеличиваете число маршрутов, добавленные маршруты имеют ширину, заданную в параметре Lane Width (m). Если Lane Width (m) является вектором из отличающихся ширин маршрута, то добавленные маршруты имеют ширину, заданную в последнем векторном элементе. | ||||||||||||
| Lane Width (m) | Ширина каждого маршрута на дороге, в метрах в виде одного из этих значений:
Ширина каждого маршрута должна быть больше ширины маркировок маршрута, которые это содержит. Эти маркировки маршрута заданы параметром Marking > Width (m). | ||||||||||||
| Lane Types | Маршруты на дороге в виде списка маршрута вводят на выбранной дороге. Чтобы изменить один или несколько параметров маршрута, которые включают тип маршрута, цвет и сила, выбирают желаемый маршрут из выпадающего списка. | ||||||||||||
| Lane Types > Type | Тип маршрута в виде одного из этих значений:
Значение по умолчанию: | ||||||||||||
| Lane Types > Color | Цвет маршрута в виде триплета RGB со значениями по умолчанию как:
В качестве альтернативы можно также задать некоторые простые цвета как триплет RGB, шестнадцатеричный цветовой код, название цвета или короткое название цвета. Для получения дополнительной информации смотрите Спецификации цветов для Маршрутов и Маркировок. | ||||||||||||
| Lane Types > Strength | Сила насыщения маршрута окрашивает в виде десятичного скаляра в области значений [0, 1].
Значение по умолчанию: | ||||||||||||
| Lane Markings | Маркировки маршрута в виде списка маркировок маршрута на выбранной дороге. Чтобы изменить один или несколько параметров маркировки маршрута, которые включают тип маркировки, цвет и сила, выбирают желаемую маркировку маршрута из выпадающего списка. Дорога с маршрутами N имеет (N + 1) маркировки маршрута. | ||||||||||||
| Lane Markings > Specify multiple marker types along a lane | Выберите этот параметр, чтобы задать составные маркировки маршрута. Составная маркировка маршрута включает несколько типов маркера вдоль маршрута. Фрагмент маршрута, отмечающего, который содержит каждый тип маркера, отнесен как marker segment. Для получения дополнительной информации о составных маркировках маршрута смотрите, что Составной Маршрут отмечает. | ||||||||||||
| Lane Markings > Number of Marker Segments | Количество сегментов маркера в составной маркировке маршрута в виде целого числа, больше, чем или равный 2. Составная маркировка маршрута должна иметь по крайней мере два сегмента маркера. Значение по умолчанию: Зависимости Чтобы включить этот параметр, выберите параметр Specify multiple marker types along a lane. | ||||||||||||
| Lane Markings > Segment Range | Нормированная область значений для каждого сегмента маркера в составной маркировке маршрута в виде вектора-строки из значений в области значений [0, 1]. Длина вектора должна быть равна значению параметров Number of Marker Segments. Значение по умолчанию: Зависимости Чтобы включить этот параметр, выберите параметр Specify multiple marker types along a lane. | ||||||||||||
| Lane Markings > Marker Segment | Сегменты маркера в виде списка маркера вводят в выбранной маркировке маршрута. Чтобы изменить один или несколько параметров сегмента маркера, которые включают тип маркировки, цвет и сила, выбирают желаемый сегмент маркера из выпадающего списка. Зависимости Чтобы включить этот параметр, выберите параметр Specify multiple marker types along a lane. | ||||||||||||
| Lane Markings > Type | Тип маркировки маршрута в виде одного из этих значений:
По умолчанию, для односторонней дороги, крайняя левая маркировка маршрута является чисто желтой линией, самая правая маркировка маршрута является чистой белой линией, и маркировки для внутренних маршрутов подчеркиваются штриховой линией белые линии. Для двухсторонних дорог наиболее удаленные маркировки маршрута по умолчанию являются и чистыми белыми линиями и делящейся маркировкой маршрута, две чисто желтых линии. Если вы включаете параметр Specify multiple marker types along a lane, то это значение применяется к выбранному сегменту маркера в составной маркировке маршрута. | ||||||||||||
| Lane Markings > Color | Цвет маркировки маршрута в виде триплета RGB, шестнадцатеричного цветового кода, названия цвета или короткого названия цвета. Для маркера маршрута, задающего двойную линию, тот же цвет используется для обеих линий. Можно также задать некоторые простые цвета как триплет RGB, шестнадцатеричный цветовой код, название цвета или короткое название цвета. Для получения дополнительной информации смотрите Спецификации цветов для Маршрутов и Маркировок. Если вы включаете параметр Specify multiple marker types along a lane, то это значение применяется к выбранному сегменту маркера в составной маркировке маршрута. | ||||||||||||
| Lane Markings > Strength | Сила насыщения маркировки маршрута окрашивает в виде десятичного скаляра в области значений [0, 1].
Для маркера маршрута, задающего двойную линию, та же сила используется для обеих линий. Значение по умолчанию: Если вы включаете параметр Specify multiple marker types along a lane, то это значение применяется к выбранному сегменту маркера в составной маркировке маршрута. | ||||||||||||
| Lane Markings > Width (m) | Ширина маркировки маршрута, в метрах в виде положительного десятичного скаляра. Ширина маркировки маршрута должна быть меньше ширины своего маршрута включения. enclosing lane является маршрутом непосредственно слева от маркировки маршрута. Для маркера маршрута, задающего двойную линию, та же ширина используется для обеих линий. Значение по умолчанию: Если вы включаете параметр Specify multiple marker types along a lane, то это значение применяется к выбранному сегменту маркера в составной маркировке маршрута. | ||||||||||||
| Lane Markings > Length (m) | Длина тире в пунктирных маркировках маршрута, в метрах в виде десятичного скаляра в области значений (0, 50]. Для маркера маршрута, задающего двойную линию, та же длина используется для обеих линий. Значение по умолчанию: Если вы включаете параметр Specify multiple marker types along a lane, то это значение применяется к выбранному сегменту маркера в составной маркировке маршрута. | ||||||||||||
| Lane Markings > Space (m) | Продолжительность пробелов между тире в пунктирных маркировках маршрута, в метрах в виде десятичного скаляра в области значений (0, 150]. Для маркера маршрута, задающего двойную линию, то же пространство используется для обеих линий. Значение по умолчанию: Если вы включаете параметр Specify multiple marker types along a lane, то это значение применяется к выбранному сегменту маркера в составной маркировке маршрута. |
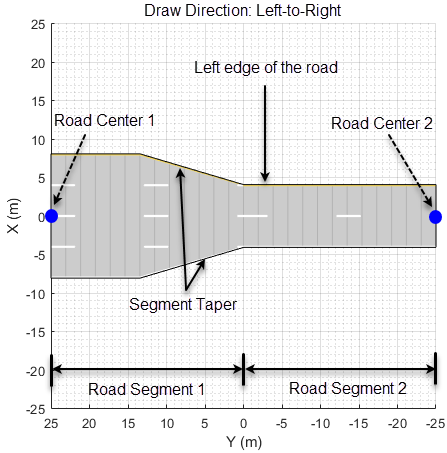
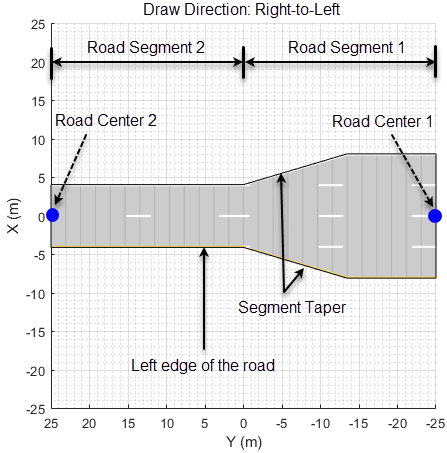
Segment Taper — Технические требования заострения между двумя дорожными сегментамиЧтобы включить параметры Segment Taper, задайте значение параметров Number of Road Segments, больше, чем 1, и задайте отличное значение или для Number of Lanes или для параметра Lane Width (m) по крайней мере одного дорожного сегмента. Затем выберите заострение из выпадающего списка, чтобы задать параметры заострения.
Дорога с сегментами дороги N имеет заострения сегмента (N - 1). Lth заостритесь, где L <N, часть Lth дорожный сегмент.
| Параметр | Описание |
|---|---|
| Shape | Форма заострения дорожного сегмента в виде любого Значение по умолчанию: |
| Length (m) | Длина заострения дорожного сегмента в виде положительной скалярной величины. Величины в метрах. Длина заострения по умолчанию является меньшим из Заданная длина заострения должна быть меньше длины соответствующего дорожного сегмента. В противном случае приложение сбрасывает его к значению, которое является Зависимости Чтобы включить этот параметр, установите параметр Shape на |
| Position | Ребро дорожного сегмента, из которого можно добавить или исключить маршруты в виде одного из этих значений:
Можно задать значение этого параметра для соединения двух односторонних дорожных сегментов. При соединении двухсторонних дорожных сегментов друг с другом или односторонних дорожных сегментов к двухсторонним дорожным сегментам, приложение определяет значение этого параметра на основе заданного параметра Number of Lanes. Чтобы добавить или исключить маршруты из обоих ребер одностороннего дорожного сегмента, количество маршрутов в односторонних дорожных сегментах должно отличаться четным числом. Значение по умолчанию: Зависимости Чтобы включить этот параметр, задайте различные целочисленные скаляры для параметров Number of Lanes различных дорожных сегментов. |
Road Centers — Дорожные центральные местоположенияИспользуйте эти параметры, чтобы задать ориентацию дороги.
| Параметр | Описание |
|---|---|
| Bank Angle (deg) | Наклонная поверхность от одной стороны к другой дороги, в градусах в виде одного из этих значений:
Когда вы добавляете агента в дорогу, вы не должны менять положение агента, чтобы совпадать с углами крена, заданными этим параметром. Агент автоматически следует за углами крена дороги. Значение по умолчанию: |
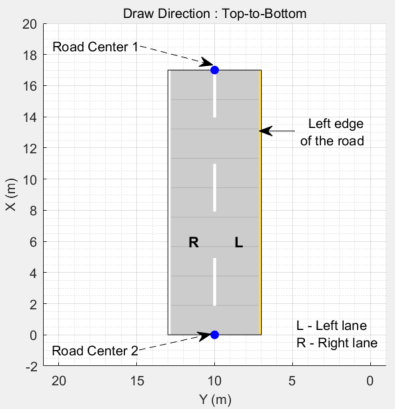
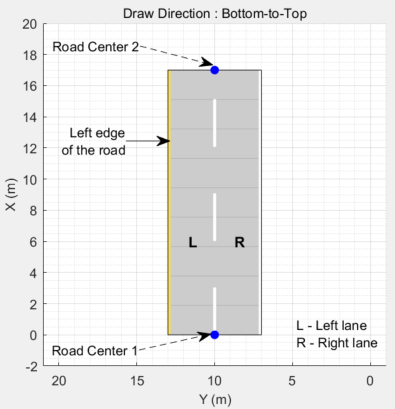
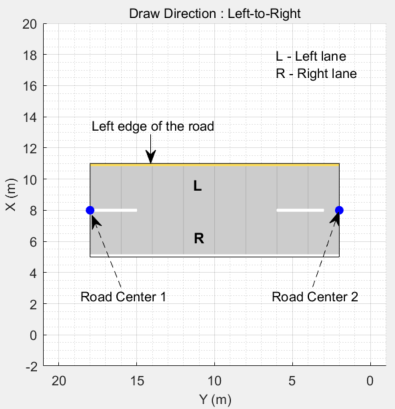
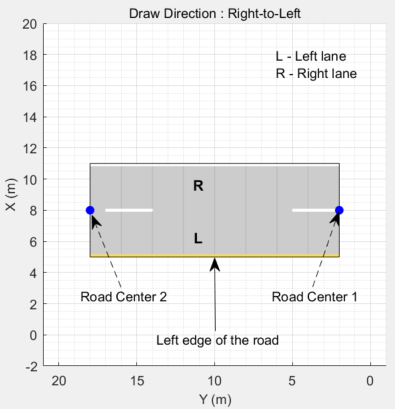
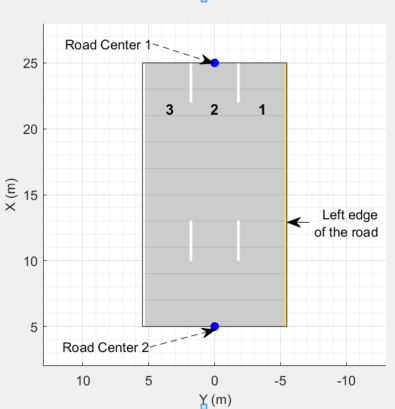
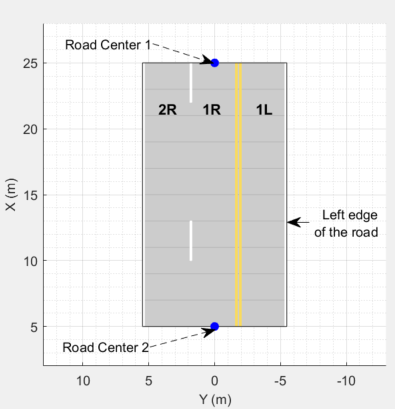
Каждая строка таблицы Road Centers содержит x - y - и z - положения, а также угол рыскания, дорожного центра в выбранной дороге. Все дороги должны иметь по крайней мере два уникальных дорожных центральных положения. Когда вы обновляете ячейку в рамках таблицы, Scenario Canvas обновляется, чтобы отразить новое дорожное центральное положение. Ориентация дороги зависит от значений дорожных центров и углов рыскания. Дорожные центры задают направление, в котором дорога представляет в Scenario Canvas. Для получения дополнительной информации смотрите, Чертят Направление Дороги и Нумерацию Маршрутов.
| Параметр | Описание |
|---|---|
| x (m) | x- позиция оси дорожного центра, в метрах в виде десятичного скаляра. |
| y (m) | y- позиция оси дорожного центра, в метрах в виде десятичного скаляра. |
| z (m) | z- позиция оси дорожного центра, в метрах в виде десятичного скаляра.
Значение по умолчанию: |
| heading (°) | Угол рыскания дороги о ее x - ось в дорожном центре, в градусах в виде десятичного скаляра. Когда вы задаете угол рыскания, он действует как ограничение на ту дорожную центральную точку, и приложение автоматически определяет другие углы рыскания. Определение углов рыскания включает более прекрасное управление формой и ориентацию дороги в Scenario Canvas. Для получения дополнительной информации смотрите Угол рыскания. Когда вы экспортируете ведущий сценарий в функцию MATLAB и запускаете эту функцию, MATLAB переносит углы рыскания дороги в выходном сценарии, к области значений [–180, 180]. |
Road Group Centers — Перекрестные местоположения центраКаждая строка таблицы Road Group Centers содержит x - y - и z - позиции центра в выбранном пересечении импортированной дорожной сети. Эти центральные параметры положения являются параметрами только для чтения, поскольку пересечения не могут быть созданы в интерактивном режиме. Используйте roadGroup функция, чтобы добавить пересечение в сценарий программно.
| Параметр | Описание |
|---|---|
| x (m) | x- позиция оси перекрестного центра, в метрах в виде десятичного скаляра. |
| y (m) | y- позиция оси перекрестного центра, в метрах в виде десятичного скаляра. |
| z (m) | z- позиция оси дорожного центра, в метрах в виде десятичного скаляра.
Зависимости Чтобы включить этот параметр, выберите пересечение из Scenario Canvas. Приложение включает этот параметр для этих случаев только:
|
Actors — Положения агента, ориентации, шаблоны ЭПР и траекторииЧтобы включить параметры Actors, добавьте по крайней мере одного агента в сценарий. Затем выберите агента или из Scenario Canvas или из списка на вкладке Actors. Значения параметров во вкладке Actors основаны на агенте, которого вы выбираете. Если вы выбираете несколько агентов, то многие из этих параметров отключены.
| Параметр | Описание | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Color | Чтобы изменить цвет агента, рядом со списком выбора агента, кликают по цветовому полю для того агента.
Затем используйте палитру цветов, чтобы выбрать один из стандартных цветов, обычно используемых в графике MATLAB. В качестве альтернативы выберите пользовательский цвет из вкладки Custom Colors первым нажатием По умолчанию приложение настраивает каждого недавно созданного актера новому цвету. Эта последовательность цветов основана на порядке цвета по умолчанию Чтобы выбрать один цвет по умолчанию для всех недавно созданных агентов определенного класса, на панели инструментов приложения, выбирают Add Actor> Edit Actor Classes. Затем выберите Set Default Color и кликните по соответствующему цветовому полю, чтобы выбрать цвет. Чтобы выбрать цвет по умолчанию для класса, Scenario Canvas не должен содержать агентов того класса. Цветные изменения, внесенные в приложении, продвинуты в визуализацию Bird's-Eye Scope. | ||||||||||||||
| Set as Ego Vehicle | Настройте выбранного актера как автомобиль, оборудованный датчиком в сценарии. Когда вы добавляете датчики в свой сценарий, приложение добавляет их в автомобиль, оборудованный датчиком. Кроме того, окна Ego-Centric View и Bird's-Eye Plot отображают симуляции с точки зрения автомобиля, оборудованного датчиком. Только агенты, у кого есть классы транспортного средства, такие как Для получения дополнительной информации о классах агента см. описание параметра Class. | ||||||||||||||
| Name | Имя агента. | ||||||||||||||
| Class | Класс агента в виде списка классов, в которые можно изменить выбранного агента. Можно изменить класс агентов транспортного средства только к другим классам транспортного средства. Классами транспортного средства по умолчанию является Список классов транспортного средства и нетранспортного средства появляется в панели инструментов приложения, в Add Actor> Vehicles и Add Actor> Other или Add Actor> разделы Barriers, соответственно. Агенты, созданные в приложении, имеют наборы по умолчанию размерностей, шаблонов эффективной площади рассеивания и других свойств на основе их значения Class ID. Таблица показывает значения Class ID по умолчанию и классы агента.
Чтобы изменить классы агента или создать новые классы агента, на панели инструментов приложения, выбирают Add Actor> Edit Actor Classes или Add Actor> New Actor Class, соответственно. | ||||||||||||||
| 3D Display Type | Тип дисплея агента, как это появляется в 3D окне экрана в виде списка типов дисплея, в которые можно изменить выбранного агента. Чтобы отобразить сценарий в 3D окне экрана в процессе моделирования, на панели инструментов приложения, нажимают 3D Display> View Simulation in 3D Display. Приложение представляет это отображение при помощи Нереального Engine® от эпических игр®. Для любого агента доступные опции 3D Display Type зависят от класса агента, заданного в параметре Class.
Если вы изменяете размерности агента с помощью параметров Actor Properties, приложение применяет эти изменения в отображении Scenario Canvas, но не в 3D отображении. Этот случай не применяется к агентам, 3D Display Type которых установлен в В 3D отображении агенты всех других типов дисплея предопределили размерности. Чтобы использовать те же размерности в обоих отображениях, можно применить предопределенные 3D размеры дисплея к агентам в отображении Scenario Canvas. На панели инструментов приложения, под 3D Display, выбирают Use 3D Simulation Actor Dimensions. |
Actor Properties — Свойства агента, включая положение и ориентациюИспользуйте эти параметры, чтобы задать свойства, такие как положение и ориентация агента.
| Параметр | Описание |
|---|---|
| Length (m) | Длина агента, в метрах в виде десятичного скаляра в области значений (0, 60]. Для транспортных средств длина должна быть больше (Front Overhang + Rear Overhang). |
| Width (m) | Ширина агента, в метрах в виде десятичного скаляра в области значений (0, 20]. |
| Height (m) | Высота агента, в метрах в виде десятичного скаляра в области значений (0, 20]. |
| Front Overhang | Расстояние между передней осью и передним бампером, в метрах в виде десятичного скаляра. Передний нависающий край должен быть меньше (Length (m) – Rear Overhang). Этот параметр применяется к транспортным средствам только. Значение по умолчанию: |
| Rear Overhang | Расстояние между задней осью и задним бампером, в метрах в виде десятичного скаляра. Задний нависающий край должен быть меньше (Length (m) – Front Overhang). Этот параметр применяется к транспортным средствам только. Значение по умолчанию: |
| Roll (°) | Угол ориентации агента о его x - ось, в градусах в виде десятичного скаляра. Roll (°) по часовой стрелке положителен при взгляде в прямом направлении x - ось, которая указывает вперед от агента. Когда вы экспортируете функцию MATLAB ведущего сценария и запускаете эту функцию, крен агентов в выходном сценарии перенесен к области значений [–180, 180]. Значение по умолчанию: |
| Pitch (°) | Угол ориентации агента о его y - ось, в градусах в виде десятичного скаляра. Pitch (°) по часовой стрелке положителен при взгляде в прямом направлении y - ось, которая указывает слева от агента. Когда вы экспортируете функцию MATLAB ведущего сценария и запускаете эту функцию, углы тангажа агентов в выходном сценарии перенесены к области значений [–180, 180]. Значение по умолчанию: |
| Yaw (°) | Угол ориентации агента о его z - ось, в градусах в виде десятичного скаляра. Yaw (°) по часовой стрелке положителен при взгляде в прямом направлении z - ось, которая подчеркивает от земли. Однако Scenario Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении z - ось. Поэтому при просмотре агентов на этом холсте, Yaw (°) против часовой стрелки положителен. Когда вы экспортируете функцию MATLAB ведущего сценария и запускаете эту функцию, углы рыскания агентов в выходном сценарии перенесены к области значений [–180, 180]. Значение по умолчанию: |
Radar Cross Section — ЭПР агентаИспользуйте эти параметры, чтобы вручную задать эффективную площадь рассеивания (ЭПР) агента. В качестве альтернативы, чтобы импортировать ЭПР из файла или из рабочего пространства MATLAB, расширьте этот раздел параметра и нажмите Import.
| Параметр | Описание |
|---|---|
| Azimuth Angles (deg) | Горизонтальный отражательный шаблон агента, в градусах в виде вектора из монотонно увеличения десятичных значений в области значений [–180, 180]. Значение по умолчанию: |
| Elevation Angles (deg) | Вертикальный отражательный шаблон агента, в градусах в виде вектора из монотонно увеличения десятичных значений в области значений [–90, 90]. Значение по умолчанию: |
| Pattern (dBsm) | Шаблон ЭПР, в децибелах на квадратный метр в виде Q-by-P таблица десятичных значений. ЭПР является функцией азимута и углов возвышения, где:
|
Trajectory — Траектории агентаИспользуйте таблицу Waypoints, Speeds, Wait Times, and Yaw, чтобы вручную установить или измените положения, скорости, время ожидания и углы ориентации рыскания агентов в их заданном waypoints. Когда определение траекторий, чтобы переключиться между добавляющим прямым и противоположным движением waypoints, использует добавить прямое и противоположное движение waypoint кнопки![]() .
.
| Параметр | Описание |
|---|---|
| Constant Speed (m/s) | Скорость по умолчанию агентов, когда вы добавляете waypoints в виде положительного десятичного скаляра в метрах в секунду. Если вы устанавливаете определенные значения скорости в столбце v (m/s) таблицы Waypoints, Speeds, Wait Times, and Yaw, то приложение очищает значение Constant Speed (m/s). Если вы затем задаете новое значение Constant Speed (m/s), то приложение устанавливает весь waypoints на новое значение постоянной скорости. Скорость по умолчанию агента варьируется классом агента. Например, автомобили и грузовики имеют постоянную скорость по умолчанию 30 метров в секунду, тогда как у пешеходов есть постоянная скорость по умолчанию 1,5 метров в секунду. |
| Waypoints, Speeds, Wait Times, and Yaw | Агент waypoints в виде таблицы. Каждая строка соответствует waypoint и содержит положение, скорость и ориентацию агента в этом waypoint. Таблица имеет эти столбцы:
|
| Use smooth, jerk-limited trajectory | Выберите этот параметр, чтобы задать сглаженную траекторию для агента. Сглаженные траектории не имеют никаких разрывов на ускорении и требуются для симуляции датчика INS. Если вы монтируете датчик INS к автомобилю, оборудованному датчиком, то обновления приложения автомобиль, оборудованный датчиком, чтобы использовать сглаженную траекторию. Если приложение не может сгенерировать сглаженную траекторию, попытайтесь внести эти корректировки:
Приложение вычисляет сглаженные траектории при помощи Значение по умолчанию: |
| Толчок (m/s3) | Максимальный продольный толчок агента, в метрах, в секунду возведенных в куб в виде скаляра с действительным знаком, больше, чем или равный 0,1. |
| Параметр | Описание |
|---|---|
| Actor spawn and despawn | Выберите этот параметр, чтобы метать икру или despawn агент в ведущем сценарии, в то время как симуляция запускается. Чтобы включить этот параметр, необходимо сначала выбрать агента в сценарии путем нажатия на агента. Задайте значения для Entry Time (s), и параметры Exit Time (s), чтобы заставить агента войти (порождают) и выходят (despawn) из сценария, соответственно. Значение по умолчанию: |
| Entry Time (s) | Время записи, в которое агент мечет икру в сценарий в процессе моделирования в виде одного из этих значений:
Значением по умолчанию в течение времени записи является |
| Exit Time (s) | Выйдите из времени в который агент despawns из сценария в процессе моделирования в виде одного из этих значений:
Значением по умолчанию в течение выходного времени является |
Чтобы получить ожидаемое порождение и despawning поведение, Entry Time (s) и параметры Exit Time (s) должны удовлетворить этим условиям:
Каждое значение для параметра Entry Time (s) должно быть меньше соответствующего значения для параметра Exit Time (s).
Каждое значение для Entry Time (s) и параметров Exit Time (s) должно быть меньше целого времени симуляции, которое установлено или условием остановки или временем остановки.
Когда Entry Time (s) и параметры Exit Time (s) заданы как векторы:
Элементы каждого вектора должны быть в порядке возрастания.
Длины обоих векторы должны быть тем же самым.
Barriers — Свойства сегмента барьера, барьер сосредотачивает местоположения и шаблоны ЭПР Чтобы включить параметры Barriers, добавьте по крайней мере один барьер для сценария. Затем выберите барьер или из Scenario Canvas или из вкладки Barriers. Значения параметров во вкладке Barriers основаны на барьере, который вы выбираете.
| Параметр | Описание |
|---|---|
| Color | Чтобы изменить цвет барьера, рядом со списком выбора агента, кликают по цветовому полю для того барьера. Затем используйте палитру цветов, чтобы выбрать один из стандартных цветов, обычно используемых в графике MATLAB. В качестве альтернативы выберите пользовательский цвет из вкладки Custom Colors первым нажатием Цветные изменения, внесенные в приложении, продвинуты в визуализацию Bird's-Eye Scope. |
| Name | Имя барьера |
| Bank Angle (°) | Наклонная поверхность от одной стороны к другой барьера, в градусах в виде одного из этих значений:
Это свойство допустимо только, когда вы добавляете барьер с помощью центров барьера. Когда вы добавляете барьер для дороги, барьер автоматически берет углы крена дороги. Значение по умолчанию: |
| Barrier Type | Тип барьера в виде одной из следующих опций:
|
Barrier Properties — Свойства барьера Используйте эти параметры, чтобы задать физические свойства барьера.
| Параметр | Описание |
|---|---|
| Width (m) | Ширина барьера, в метрах в виде десятичного скаляра в области значений (0,20]. Значение по умолчанию:
|
| Height (m) | Высота барьера, в метрах в виде десятичного скаляра в области значений (0,20]. Значение по умолчанию:
|
| Segment Length (m) | Длина каждого сегмента барьера, в метрах в виде десятичного скаляра в области значений (0,100]. Значение по умолчанию: |
| Segment Gap (m) | Разорвите между последовательными сегментами барьера, в метрах в виде десятичного скаляра в области значений [0, Значение по умолчанию: |
Radar Cross Section — ЭПР барьераИспользуйте эти параметры, чтобы вручную задать эффективную площадь рассеивания (ЭПР) барьера. В качестве альтернативы, чтобы импортировать ЭПР из файла или из рабочего пространства MATLAB, расширьте этот раздел параметра и нажмите Import.
| Параметр | Описание |
|---|---|
| Azimuth Angles (deg) | Горизонтальный отражательный шаблон барьера, в градусах в виде вектора из монотонно увеличения десятичных значений в области значений [–180, 180]. Значение по умолчанию: |
| Elevation Angles (deg) | Вертикальный отражательный шаблон барьера, в градусах в виде вектора из монотонно увеличения десятичных значений в области значений [–90, 90]. Значение по умолчанию: |
| Pattern (dBsm) | Шаблон ЭПР, в децибелах на квадратный метр в виде Q-by-P таблица десятичных значений. ЭПР является функцией азимута и углов возвышения, где:
|
Barrier Centers — Местоположения центра барьераКаждая строка таблицы Barrier Centers содержит x - y - и z - позиции центра барьера в выбранном барьере. Все барьеры должны иметь по крайней мере две уникальных позиции центра барьера. Когда вы обновляете ячейку в рамках таблицы, обновления Scenario Canvas, чтобы отразить новую позицию центра барьера. Ориентация барьера зависит от значений центров барьера. Центры барьера задают направление, в котором барьер представляет в Scenario Canvas.
| Параметр | Описание |
|---|---|
| Road Edge Offset (m) | Расстояние, которым барьер возмещен от дорожного ребра в боковом направлении в метрах в виде десятичного скаляра. |
| x (m) | x- позиция оси центра барьера, в метрах в виде десятичного скаляра. |
| y (m) | y- позиция оси центра барьера, в метрах в виде десятичного скаляра. |
| z (m) | z- позиция оси центра барьера, в метрах в виде десятичного скаляра. Значение по умолчанию: |
Sensors (Camera) — Размещение датчика камеры, внутренние параметры камеры и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один датчик камеры в сценарий путем выполнения этих шагов:
На панели инструментов приложения нажмите Add Camera.
От вкладки Sensors выберите датчик из списка. Значения параметров в этой вкладке основаны на датчике, который вы выбираете.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы собрать данные о датчике в процессе моделирования и визуализировать те данные в панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, на которой датчик обновляется, в миллисекундах в виде целочисленного кратного шаг расчета приложения, заданный под Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, таким образом, что датчик больше не является кратным шагу расчета приложения, приложение предлагает вам с опцией автоматически обновлять параметр Update Interval (ms) до самого близкого целого числа несколько. Значение по умолчанию: |
| Type | Тип датчика в виде Radar, Vision, Lidar или INS. |
Sensor Placement — Положение камеры и ориентацияИспользуйте эти параметры, чтобы установить положение и ориентацию датчика выбранной камеры.
| Параметр | Описание |
|---|---|
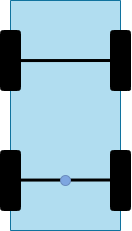
| X (m) | X- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. X - ось указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. Y - ось указывает слева от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах в виде положительного десятичного скаляра. |
| Roll (°) | Угол ориентации датчика о его X - ось, в градусах в виде десятичного скаляра. Roll (°) по часовой стрелке положителен при взгляде в прямом направлении X - ось, которая указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика о его Y - ось, в градусах в виде десятичного скаляра. Pitch (°) по часовой стрелке положителен при взгляде в прямом направлении Y - ось, которая указывает слева от датчика. |
| Yaw (°) | Угол ориентации датчика о его Z - ось, в градусах в виде десятичного скаляра. Yaw (°) по часовой стрелке положителен при взгляде в прямом направлении Z - ось, которая подчеркивает от земли. Sensor Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении Z - ось. Поэтому при просмотре зон охвата датчика на этом холсте, Yaw (°) против часовой стрелки положителен. |
Camera Settings — Внутренние параметры камерыИспользуйте эти параметры, чтобы установить внутренние параметры датчика камеры.
| Параметр | Описание |
|---|---|
| Focal Length X | Горизонтальная точка, в которой камера находится в особом внимании в пикселях в виде положительного десятичного скаляра. Фокусное расстояние по умолчанию изменяется в зависимости от того, куда вы помещаете датчик в автомобиль, оборудованный датчиком. |
| Focal Length Y | Вертикальная точка, в которой камера находится в особом внимании в пикселях в виде положительного десятичного скаляра. Фокусное расстояние по умолчанию изменяется в зависимости от того, куда вы помещаете датчик в автомобиль, оборудованный датчиком. |
| Image Width | Горизонтальное разрешение камеры, в пикселях в виде положительного целого числа. Значение по умолчанию: |
| Image Height | Вертикальное разрешение камеры, в пикселях в виде положительного целого числа. Значение по умолчанию: |
| Principal Point X | Горизонтальный центр изображения, в пикселях в виде положительного десятичного скаляра. Значение по умолчанию: |
| Principal Point Y | Вертикальный центр изображения, в пикселях в виде положительного десятичного скаляра. Значение по умолчанию: |
Sensor Parameters — Параметры обнаружения камерыЧтобы просмотреть все параметры обнаружения камеры в приложении, расширьте Sensor Limits, Lane Settings и разделы Accuracy & Noise Settings.
| Параметр | Описание |
|---|---|
| Detection Type | Тип обнаружений, о которых сообщает камера в виде одного из этих значений:
Значение по умолчанию: |
| Detection Probability | Вероятность, что камера обнаруживает объект в виде десятичного скаляра в области значений (0, 1]. Значение по умолчанию: |
| False Positives Per Image | Количество ложных положительных сторон, о которых сообщают на интервал обновления в виде неотрицательного десятичного скаляра. Это значение должно быть меньше чем или равно максимальному количеству обнаружений, заданных в параметре Limit # of Detections. Значение по умолчанию: |
| Limit # of Detections | Выберите этот параметр, чтобы ограничить количество одновременных обнаружений объектов, о которых сообщает датчик. Задайте Limit # of Detections как положительное целое число меньше чем 263. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
| Detection Coordinates | Система координат выходных местоположений обнаружения в виде одного из этих значений:
Значение по умолчанию: |
Пределы датчика
| Параметр | Описание |
|---|---|
| Max Speed (m/s) | Самая быстрая относительная скорость, на которой камера может обнаружить объекты в метрах в секунду в виде неотрицательного десятичного скаляра. Значение по умолчанию: |
| Max Range (m) | Самое дальнее расстояние, на котором камера может обнаружить объекты в метрах в виде положительного десятичного скаляра. Значение по умолчанию: |
| Max Allowed Occlusion | Максимальный процент объекта, который может быть блокирован, все еще будучи обнаруженным в виде десятичного скаляра в области значений [0, 1). Значение по умолчанию: |
| Min Object Image Width | Минимальный горизонтальный размер объектов, которые камера может обнаружить в пикселях в виде положительного десятичного скаляра. Значение по умолчанию: |
| Min Object Image Height | Минимальный вертикальный размер объектов, которые камера может обнаружить в пикселях в виде положительного десятичного скаляра. Значение по умолчанию: |
Настройки маршрута
| Параметр | Описание |
|---|---|
| Lane Update Interval (ms) | Частота, на которой датчик обновляет обнаружения маршрута в миллисекундах в виде десятичного скаляра. Значение по умолчанию: |
| Min Lane Image Width | Минимальный горизонтальный размер объектов, которые датчик может обнаружить в пикселях в виде десятичного скаляра. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
| Min Lane Image Height | Минимальный вертикальный размер объектов, которые датчик может обнаружить в пикселях в виде десятичного скаляра. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
| Boundary Accuracy | Точность, с которой датчик помещает контур маршрута в пикселях в виде десятичного скаляра. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
| Limit # of Lanes | Выберите этот параметр, чтобы ограничить количество обнаружений маршрута, о которых сообщает датчик. Задайте Limit # of Lanes как положительное целое число. Чтобы включить этот параметр, установите параметр Detection Type на Значение по умолчанию: |
Accuracy & Noise Settings
| Параметр | Описание |
|---|---|
| Bounding Box Accuracy | Позиционный шум, используемый для подбора кривой ограничительным рамкам к целям, в пикселях в виде положительного десятичного скаляра. Значение по умолчанию: |
| Process Noise Intensity (m/s^2) | Шумовая интенсивность, используемая для сглаживания положения и скоростных измерений, в метрах в секунду, придала квадратную форму в виде положительного десятичного скаляра. Значение по умолчанию: |
| Has Noise | Выберите этот параметр, чтобы позволить добавить шум в измерения датчика. Значение по умолчанию: |
Sensors (Radar) — Радарное размещение датчика и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один радарный датчик в сценарий.
На панели инструментов приложения нажмите Add Radar.
На вкладке Sensors выберите датчик из списка. Значения параметров изменяются на основе датчика, который вы выбираете.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы собрать данные о датчике в процессе моделирования и визуализировать те данные в панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, на которой датчик обновляется, в миллисекундах в виде целочисленного кратного шаг расчета приложения, заданный под Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, таким образом, что датчик больше не является кратным шагу расчета приложения, приложение предлагает вам с опцией автоматически обновлять параметр Update Interval (ms) до самого близкого целого числа несколько. Значение по умолчанию: |
| Type | Тип датчика в виде Radar, Vision, Lidar или INS. |
Sensor Placement — Радарное положение и ориентацияИспользуйте эти параметры, чтобы установить положение и ориентацию выбранного радарного датчика.
| Параметр | Описание |
|---|---|
| X (m) | X- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. X - ось указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. Y - ось указывает слева от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах в виде положительного десятичного скаляра. |
| Roll (°) | Угол ориентации датчика о его X - ось, в градусах в виде десятичного скаляра. Roll (°) по часовой стрелке положителен при взгляде в прямом направлении X - ось, которая указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика о его Y - ось, в градусах в виде десятичного скаляра. Pitch (°) по часовой стрелке положителен при взгляде в прямом направлении Y - ось, которая указывает слева от датчика. |
| Yaw (°) | Угол ориентации датчика о его Z - ось, в градусах в виде десятичного скаляра. Yaw (°) по часовой стрелке положителен при взгляде в прямом направлении Z - ось, которая подчеркивает от земли. Sensor Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении Z - ось. Поэтому при просмотре зон охвата датчика на этом холсте, Yaw (°) против часовой стрелки положителен. |
Sensor Parameters — Радарные параметры обнаруженияЧтобы просмотреть все радарные параметры обнаружения в приложении, расширьте разделы Accuracy & Noise Settings и Advanced Parameters.
| Параметр | Описание |
|---|---|
| Detection Probability | Вероятность, что радар обнаруживает объект в виде десятичного скаляра в области значений (0, 1]. Значение по умолчанию: |
| False Alarm Rate | Вероятность ложного обнаружения на уровень разрешения в виде десятичного скаляра в области значений [1e-07, 1e-03]. Значение по умолчанию: |
| Field of View Azimuth | Горизонтальное поле зрения радара, в градусах в виде положительного десятичного скаляра. Значение по умолчанию: |
| Field of View Elevation | Вертикальное поле зрения радара, в градусах в виде положительного десятичного скаляра. Значение по умолчанию: |
| Max Range (m) | Самое дальнее расстояние, на котором радар может обнаружить объекты в метрах в виде положительного десятичного скаляра. Значение по умолчанию: |
| Range Rate Min, Range Rate Max | Выберите этот параметр, чтобы установить минимальные и максимальные ограничения скорости области значений для радара. Задайте Range Rate Min и Range Rate Max как десятичные скаляры в метрах в секунду, где Range Rate Min меньше Range Rate Max. Значение по умолчанию (Min): Значение по умолчанию (Max): |
| Has Elevation | Выберите этот параметр, чтобы позволить радару измерить вертикальное изменение объектов. Этот параметр включает параметры вертикального изменения в разделе Accuracy & Noise Settings. Значение по умолчанию: |
| Has Occlusion | Выберите этот параметр, чтобы включить радар к поглощению газов модели. Значение по умолчанию: |
Продвинутые параметры
| Параметр | Описание |
|---|---|
| Reference Range | Диапазон ссылки для данной вероятности обнаружения, в метрах в виде положительного десятичного скаляра. reference range является областью значений, в которой радар обнаруживает цель размера, заданного Reference RCS, учитывая вероятность обнаружения, заданного Detection Probability. Значение по умолчанию: |
| Reference RCS | Ссылочный ЭПР для данной вероятности обнаружения, в децибелах на квадратный метр в виде неотрицательного десятичного скаляра. reference RCS является целевым размером, в котором радар обнаруживает цель, учитывая диапазон ссылки, указанный Reference Range и вероятностью обнаружения, заданного Detection Probability. Значение по умолчанию: |
| Limit # of Detections | Выберите этот параметр, чтобы ограничить количество одновременных обнаружений, о которых сообщает датчик. Задайте Limit # of Detections как положительное целое число меньше чем 263. Значение по умолчанию: |
| Detection Coordinates | Система координат выходных местоположений обнаружения в виде одного из этих значений:
Значение по умолчанию: |
Accuracy & Noise Settings
| Параметр | Описание |
|---|---|
| Azimuth Resolution | Минимальное разделение в углу азимута, под которым радар может различать две цели, в градусах в виде положительного десятичного скаляра. Разрешение азимута обычно - 3 дБ downpoint в угловой ширине луча азимута радара. Значение по умолчанию: |
| Azimuth Bias Fraction | Максимальная точность азимута радара в виде неотрицательного десятичного скаляра. Смещение азимута описывается как часть разрешения азимута, заданного параметром Azimuth Resolution. Модули являются безразмерными. Значение по умолчанию: |
| Elevation Resolution | Минимальное разделение в угле возвышения, в котором радар может различать две цели, в градусах в виде положительного десятичного скаляра. Разрешение вертикального изменения обычно - 3 дБ downpoint в ширине луча угла возвышения радара. Чтобы включить этот параметр, в разделе Sensor Parameters, выбирают параметр Has Elevation. Значение по умолчанию: |
| Elevation Bias Fraction | Максимальная точность вертикального изменения радара в виде неотрицательного десятичного скаляра. Смещение вертикального изменения описывается как часть разрешения вертикального изменения, заданного параметром Elevation Resolution. Модули являются безразмерными. Чтобы включить этот параметр, под Sensor Parameters, выбирают параметр Has Elevation. Значение по умолчанию: |
| Range Resolution | Минимальное разделение области значений, при котором радар может различать две цели в метрах в виде положительного десятичного скаляра. Значение по умолчанию: |
| Range Bias Fraction | Максимальная точность области значений радара в виде неотрицательного десятичного скаляра. Смещение области значений описывается как часть разрешения области значений, заданного в параметре Range Resolution. Модули являются безразмерными. Значение по умолчанию: |
| Range Rate Resolution | Минимальное разделение уровня области значений, при котором радар может различать две цели в метрах в секунду в виде положительного десятичного скаляра. Чтобы включить этот параметр, в разделе Sensor Parameters, выбирают параметр Range Rate Min, Range Rate Max и устанавливают значения уровня области значений. Значение по умолчанию: |
| Range Rate Bias Fraction | Максимальная точность уровня области значений радара в виде неотрицательного десятичного скаляра. Смещение уровня области значений описывается как часть разрешения уровня области значений, заданного в параметре Range Rate Resolution. Модули являются безразмерными. Чтобы включить этот параметр, в разделе Sensor Parameters, выбирают параметр Range Rate Min, Range Rate Max и устанавливают значения уровня области значений. Значение по умолчанию: |
| Has Noise | Выберите этот параметр, чтобы позволить добавить шум в измерения датчика. Значение по умолчанию: |
| Has False Alarms | Выберите этот параметр, чтобы включить ложные предупреждения в обнаружениях датчика. Значение по умолчанию: |
Sensors (Lidar) — Лоцируйте размещение датчика, создание отчетов облака точек и параметры обнаруженияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один датчик лидара в сценарий.
На панели инструментов приложения нажмите Add Lidar.
На вкладке Sensors выберите датчик из списка. Значения параметров изменяются на основе датчика, который вы выбираете.
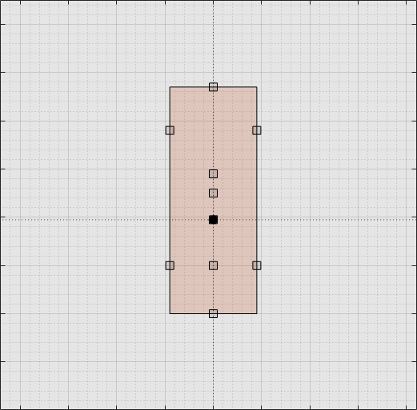
Когда вы добавляете, что датчик лидара к сценарию, Bird's-Eye Plot и Ego-Centric View отображает представления mesh агентов. Например, вот демонстрационное представление сеток агента на Ego-Centric View.
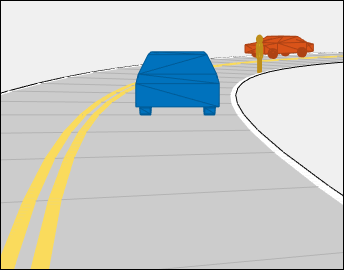
Датчики лидара используют эти более подробные представления агентов, чтобы сгенерировать данные об облаке точек. Scenario Canvas все еще отображает только представления кубоида. Другие датчики все еще основывают свои обнаружения на представлениях кубоида.
Чтобы выключить сетки агента, используйте свойства под Display на панели инструментов приложения. Чтобы изменить типы дисплея mesh агентов, выберите Add Actor> Edit Actor Classes. В Редакторе Класса измените параметр Mesh Display Type того класса агента.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы собрать данные о датчике в процессе моделирования и визуализировать те данные в панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, на которой датчик обновляется, в миллисекундах в виде целочисленного кратного шаг расчета приложения, заданный под Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, таким образом, что датчик больше не является кратным шагу расчета приложения, приложение предлагает вам с опцией автоматически обновлять параметр Update Interval (ms) до самого близкого целого числа несколько. Значение по умолчанию: |
| Type | Тип датчика в виде Radar, Vision, Lidar или INS. |
Sensor Placement — Лоцируйте положение и ориентациюИспользуйте эти параметры, чтобы установить положение и ориентацию выбранного датчика лидара.
| Параметр | Описание |
|---|---|
| X (m) | X- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. X - ось указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. Y - ось указывает слева от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах в виде положительного десятичного скаляра. |
| Roll (°) | Угол ориентации датчика о его X - ось, в градусах в виде десятичного скаляра. Roll (°) по часовой стрелке положителен при взгляде в прямом направлении X - ось, которая указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика о его Y - ось, в градусах в виде десятичного скаляра. Pitch (°) по часовой стрелке положителен при взгляде в прямом направлении Y - ось, которая указывает слева от датчика. |
| Yaw (°) | Угол ориентации датчика о его Z - ось, в градусах в виде десятичного скаляра. Yaw (°) по часовой стрелке положителен при взгляде в прямом направлении Z - ось, которая подчеркивает от земли. Sensor Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении Z - ось. Поэтому при просмотре зон охвата датчика на этом холсте, Yaw (°) против часовой стрелки положителен. |
Point Cloud Reporting — Параметры создания отчетов облака точек| Параметр | Описание |
|---|---|
| Detection Coordinates | Система координат выходных местоположений обнаружения в виде одного из этих значений:
Значение по умолчанию: |
| Output organized point cloud locations | Выберите этот параметр, чтобы вывести сгенерированные данные о датчике как организованное облако точек. Если вы очищаете этот параметр, выход не организован. Значение по умолчанию: |
| Include ego vehicle in generated point cloud | Выберите этот параметр, чтобы включать автомобиль, оборудованный датчиком в сгенерированное облако точек. Значение по умолчанию: |
| Include roads in generated point cloud | Выберите этот параметр, чтобы включать дороги в сгенерированное облако точек. Значение по умолчанию: |
Sensor Parameters — Лоцируйте параметры обнаруженияПределы датчика
| Параметр | Описание |
|---|---|
| Max Range (m) | Самое дальнее расстояние, на котором лидар может обнаружить объекты в метрах в виде положительного десятичного скаляра. Значение по умолчанию: |
| Range Accuracy (m) | Точность измерений области значений, в метрах в виде положительного десятичного скаляра. Значение по умолчанию: |
| Azimuth | Азимутальное разрешение датчика лидара, в градусах в виде положительного десятичного скаляра. Азимутальное разрешение задает минимальное разделение в углу азимута, под которым лидар может отличить две цели. Значение по умолчанию: |
| Elevation | Разрешение вертикального изменения датчика лидара, в градусах в виде положительного десятичного скаляра. Разрешение вертикального изменения задает минимальное разделение в угле возвышения, в котором лидар может отличить две цели. Значение по умолчанию: |
| Azimuthal Limits (deg) | Азимутальные пределы датчика лидара, в градусах в виде двухэлементного вектора из десятичных скаляров формы Значение по умолчанию: |
| Elevation Limits (deg) | Пределы вертикального изменения датчика лидара, в градусах в виде двухэлементного вектора из десятичных скаляров формы Значение по умолчанию: |
| Has Noise | Выберите этот параметр, чтобы позволить добавить шум в измерения датчика. Значение по умолчанию: |
Sensors (INS) — Размещение датчика INS, параметры измеренияЧтобы получить доступ к этим параметрам, добавьте по крайней мере один датчик INS в сценарий путем выполнения этих шагов:
На панели инструментов приложения нажмите Add INS.
От вкладки Sensors выберите датчик из списка. Значения параметров в этой вкладке основаны на датчике, который вы выбираете.
| Параметр | Описание |
|---|---|
| Enabled | Включите или отключите выбранный датчик. Выберите этот параметр, чтобы собрать данные о датчике в процессе моделирования и визуализировать те данные в панели Bird's-Eye Plot. |
| Name | Имя датчика. |
| Update Interval (ms) | Частота, на которой датчик обновляется, в миллисекундах в виде целочисленного кратного шаг расчета приложения, заданный под Settings, в параметре Sample Time (ms). Значение Update Interval (ms) по умолчанию Если вы обновляете шаг расчета приложения, таким образом, что датчик больше не является кратным шагу расчета приложения, приложение предлагает вам с опцией автоматически обновлять параметр Update Interval (ms) до самого близкого целого числа несколько. Значение по умолчанию: |
| Type | Тип датчика в виде Radar, Vision, Lidar или INS. |
Sensor Placement — Положение INSИспользуйте эти параметры, чтобы установить положение выбранного датчика INS. Ориентация датчика принята, чтобы быть выровненной с источником автомобиля, оборудованного датчиком, таким образом, Roll (°), Pitch (°) и свойства Yaw (°) отключены для этого датчика.
| Параметр | Описание |
|---|---|
| X (m) | X- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. X - ось указывает вперед от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Y (m) | Y- положение оси датчика в системе координат транспортного средства, в метрах в виде десятичного скаляра. Y - ось указывает слева от транспортного средства. Источник расположен в центре задней оси транспортного средства. |
| Height (m) | Высота датчика над землей, в метрах в виде положительного десятичного скаляра. |
| Roll (°) | Угол ориентации датчика о его X - ось, в градусах в виде десятичного скаляра. Roll (°) по часовой стрелке положителен при взгляде в прямом направлении X - ось, которая указывает вперед от датчика. |
| Pitch (°) | Угол ориентации датчика о его Y - ось, в градусах в виде десятичного скаляра. Pitch (°) по часовой стрелке положителен при взгляде в прямом направлении Y - ось, которая указывает слева от датчика. |
| Yaw (°) | Угол ориентации датчика о его Z - ось, в градусах в виде десятичного скаляра. Yaw (°) по часовой стрелке положителен при взгляде в прямом направлении Z - ось, которая подчеркивает от земли. Sensor Canvas имеет перспективу вида с высоты птичьего полета, которая смотрит в обратном направлении Z - ось. Поэтому при просмотре зон охвата датчика на этом холсте, Yaw (°) против часовой стрелки положителен. |
Sensor Parameters — Параметры измерения INSДля дополнительных деталей об этих параметрах смотрите insSensor страница ссылки на объект.
| Параметр | Описание |
|---|---|
| Roll Accuracy (°) | Прокрутите точность, в градусах в виде неотрицательного десятичного скаляра. Это наборы значений стандартное отклонение шума измерения крена. Значение по умолчанию: |
| Pitch Accuracy (°) | Передайте точность, в градусах в виде неотрицательного десятичного скаляра. Это наборы значений стандартное отклонение шума измерения тангажа. Значение по умолчанию: |
| Yaw Accuracy (°) | Точность рыскания, в градусах в виде неотрицательного десятичного скаляра. Это наборы значений стандартное отклонение шума измерения рыскания. Значение по умолчанию: |
| Position Accuracy (m) | Точность x - y - и z позиционные измерения, в метрах в виде десятичного скалярного или трехэлементного десятичного скаляра. Это наборы значений стандартное отклонение шума измерения положения. Задайте скаляр, чтобы установить точность всех трех положений к этому значению. Значение по умолчанию: |
| Velocity Accuracy (m/s) | Точность скоростных измерений, в метрах в секунду в виде десятичного скаляра. Это наборы значений стандартное отклонение скоростного шума измерения. Значение по умолчанию: |
| Acceleration Accuracy | Точность ускоряющих измерений, в метрах в секунду придала квадратную форму в виде десятичного скаляра. Это наборы значений стандартное отклонение ускоряющего шума измерения. Значение по умолчанию: |
| Angular Velocity Accuracy | Точность измерений скорости вращения, в градусах в секунду в виде десятичного скаляра. Это наборы значений стандартное отклонение шума измерения скорости вращения. Значение по умолчанию: |
| Has GNSS Fix | Включите приемник глобальной навигационной спутниковой системы (GNSS), фиксируют. Если вы очищаете этот параметр, то измерения положения дрейфуют на уровне, заданном параметром Position Error Factor. Значение по умолчанию: |
| Position Error Factor | Ошибочный фактор положения без GNSS фиксирует в виде неотрицательного десятичного скаляра или 1 3 десятичного вектора. Значение по умолчанию: |
| Random Stream | Источник потока случайных чисел в виде одной из этих опций:
Значение по умолчанию: |
| Seed | Начальный seed mt19937ar алгоритма генератора случайных чисел в виде неотрицательного целого числа. Значение по умолчанию: |
Settings — Шаг расчета симуляции, остановите условие и время остановкиЧтобы получить доступ к этим параметрам, на панели инструментов приложения, нажимают Settings.
| Параметр | Описание |
|---|---|
| Sample Time (ms) | Частота, на которой симуляция обновляется в миллисекундах. Увеличьте шаг расчета, чтобы ускорить симуляцию. Это увеличение не оказывает влияния на скорости агента, даже при том, что агенты, может казаться, идут быстрее в процессе моделирования. Положения агента только производятся и отображаются на приложении в менее частых интервалах, приводя к более быстрым, более изменчивым анимациям. Уменьшение результатов шага расчета в более сглаженных анимациях, но агентов, кажется, перемещается медленнее, и симуляция занимает больше времени. Шаг расчета не коррелирует к фактическому времени. Например, если выборки приложения каждую 0.1 секунды (Sample Time (ms) = Значение по умолчанию: |
| Stop Condition | Остановите условие симуляции в виде одного из этих значений:
Значение по умолчанию: |
| Stop Time (s) | Время остановки симуляции, в секундах в виде положительного десятичного скаляра. Чтобы включить этот параметр, установите параметр Stop Condition на Значение по умолчанию: |
| Use RNG Seed | Выберите этот параметр, чтобы использовать seed генератора случайных чисел (RNG), чтобы воспроизвести те же результаты для каждой симуляции. Задайте seed RNG как неотрицательное целое число меньше чем 232. Значение по умолчанию: |
Ограничения Импорта/Экспорта клотоиды
Ведущие сценарии в настоящее время поддерживают только интерполированные дороги clothoid. То, когда вы импортируете дороги, создало использование других геометрических методов интерполяции, сгенерированные дорожные формы могут содержать погрешности.
Заголовок ограничений к дорожным центрам группы
Когда вы загружаете drivingScenario объект, содержащий дорожную группу дорожных сегментов с заданными заголовками в приложение Driving Scenario Designer, сгенерированная дорожная сеть может содержать погрешности. Эти погрешности происходят, потому что приложение не поддерживает информацию об угле рыскания в таблице Road Group Centers.
Ограничения парковки
Импорт парковок, созданных с помощью parkingLot функция не поддерживается. Если вы импортируете сценарий, содержащий парковку в приложение, приложение не использует парковку из сценария.
Ограничения Импорта/Экспорта датчика
Когда вы импортируете drivingRadarDataGenerator датчик, который сообщает о кластеризованных обнаружениях или дорожках в приложение и затем экспортирует датчик в MATLAB или Simulink, экспортируемый объект датчика или блок, сообщает о некластеризованных обнаружениях. Это изменение в создании отчетов о формате происходит потому что поддержки приложений генерация некластеризованных обнаружений только.
OpenStreetMap — Импортируйте ограничения
При импортировании данных OpenStreetMap дорога и функции маршрута имеют эти ограничения:
Информация об уровне маршрута не импортируется из дорог OpenStreetMap. Технические требования маршрута базируются только на направлении перемещения, заданного в дорожной сети OpenStreetMap, где:
Односторонние дороги импортируются как однополосные дороги с техническими требованиями маршрута по умолчанию. Эти маршруты программно эквивалентны lanespec(1).
Двухсторонние дороги импортируются как дороги 2D маршрута с двунаправленным перемещением и техническими требованиями маршрута по умолчанию. Эти маршруты программно эквивалентны lanespec([1 1]).
Таблица показывает эти различия в дорожной сети OpenStreetMap и дорожной сети в импортированном ведущем сценарии.
| Дорожная сеть OpenStreetMap | Импортированный ведущий сценарий |
|---|---|
|
|
Когда импорт дорожных сетей OpenStreetMap, которые задают данные о вертикальном изменении, если данные о вертикальном изменении не заданы для всех импортируемых дорог, то сгенерированная дорожная сеть может содержать погрешности и некоторые дороги, может перекрыться.
Основная карта, используемая в приложении, может иметь незначительные различия от карты, используемой в сервисе OpenStreetMap. Некоторые импортированные дорожные проблемы могут также произойти из-за пропавших без вести или неточных данных о карте в сервисе OpenStreetMap. Чтобы проверять, отсутствуют ли данные или неточные из-за картографического сервиса, рассмотрите просмотр данных о карте по внешнему средству просмотра карты.
Если вы получаете предупреждение, что геометрия дороги не может быть вычисленной, то искривление дороги слишком резко для нее, чтобы представить правильно, и она не импортируется.
HD HERE живая карта — ограничения импорта
Импорт дорог HERE HDLM с маршрутами различных ширин не поддерживается. В сгенерированной дорожной сети каждый маршрут собирается найти максимальную ширину вдоль ее целой длины. Рассмотрите маршрут HERE HDLM с шириной, которая варьируется от 2 до 4 метров вдоль ее длины. В сгенерированной дорожной сети ширина маршрута составляет 4 метра вдоль своей целой длины. Эта модификация к дорожным сетям может иногда заставлять дороги перекрываться в ведущем сценарии.
Если вы получаете предупреждение, что геометрия дороги не может быть вычисленной, то искривление дороги слишком резко для нее, чтобы представить правильно, и она не импортируется.
Основная карта, используемая в приложении, может иметь незначительные различия от карты, используемой в сервисе HERE HDLM.
Некоторые проблемы с импортированными дорогами могут произойти из-за пропавших без вести или неточных данных о карте в сервисе HERE HDLM. Например, вы можете видеть черные линии, где дороги и соединения встречаются. Чтобы проверять где основы проблемы от в данных о карте, используйте HD HERE Живой Map Viewer, чтобы просмотреть геометрию дорожной сети HERE HDLM. Это средство просмотра требует допустимой лицензии HERE. Для получения дополнительной информации смотрите веб-сайт HERE Technologies.
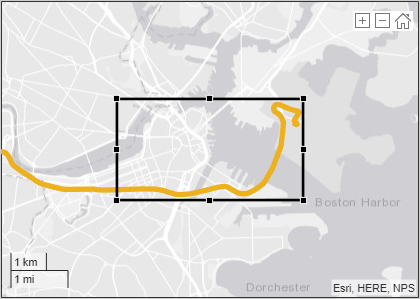
HD HERE живая карта — ограничения выбора маршрута
При выборе дорог HERE HD Live Map, чтобы импортировать из необходимой области, максимальный допустимый размер области составляет 20 квадратных километров. Если вы задаете ведущий маршрут, который больше 20 квадратных километров, приложение чертит область, которая оптимизирована, чтобы соответствовать как можно большему количеству начала маршрута в отображение. Этот рисунок показывает пример области, чертившей вокруг запуска маршрута, который превышает этот максимальный размер.
Zenrin API 3.0 карты Японии (Itsumo NAVI API 3.0) — Ограничения импорта
Когда вы импортируете API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) данные, сгенерированная дорожная сеть имеет эти ограничения. В результате этих ограничений сгенерированная сетевая сила содержит погрешности, и дороги могут перекрыться.
Сгенерированная дорожная сеть использует дорожные данные о вертикальном изменении, когда API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) обеспечивает его. В противном случае сгенерированная сеть использует данные о вертикальном изменении ландшафта, обеспеченные сервисом.
Когда API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0), сервис предоставляет информацию с помощью области значений, такой как путем определения дороги с двумя - тремя маршрутами или дороги между 3-5.5 метрами шириной, сгенерированная дорожная сеть, использует скалярные значения вместо этого. Рассмотрите API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) дорога, которая имеет два - три маршрута. Сгенерированная дорожная сеть имеет два маршрута.
Маршруты в дорогах в сгенерированной сети имеют универсальную ширину. Рассмотрите дорогу, которая 4,25 метра шириной с двумя маршрутами. В сгенерированной дорожной сети каждый маршрут 2,125 метров шириной.
Если вы получаете предупреждение, что геометрия дороги не может быть вычисленной, то искривление дороги слишком резко для нее, чтобы представить правильно, и она не импортируется.
Где возможно, сгенерированная дорожная сеть использует дорожные имена, обеспеченные API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) сервис. В противном случае сгенерированная дорожная сеть использует имена по умолчанию, такие как Road1 и Road2.
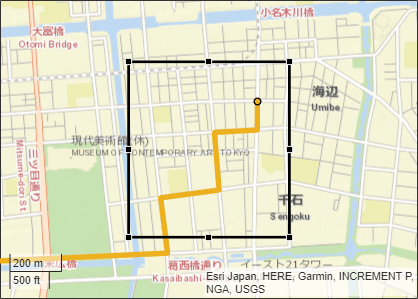
Zenrin API 3.0 карты Японии (Itsumo NAVI API 3.0) — Ограничения выбора маршрута
При выборе Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) дороги, чтобы импортировать из необходимой области, максимальный допустимый размер области составляет 500 квадратных метров. Если вы задаете ведущий маршрут, который больше 500 квадратных метров, приложение чертит область, которая оптимизирована, чтобы соответствовать как можно большему количеству начала маршрута в отображение. Этот рисунок показывает пример области, чертившей вокруг запуска маршрута, который превышает этот максимальный размер.
Ограничения импорта ASAM OpenDRIVE
Можно импортировать только маршруты, информацию о типе маршрута и дороги. Импорт дорожных объектов и сигналов трафика не поддерживается.
Файлы ASAM OpenDRIVE, содержащие большие дорожные сети, могут взять до нескольких минут, чтобы загрузить. Кроме того, эти дорожные сети могут вызвать медленные взаимодействия на холсте приложения. Примеры больших дорожных сетей включают единицы, которые моделируют дороги города или единиц с дорогами, которые являются тысячами метров долго.
Маршруты с переменными ширинами не поддерживаются. Ширина установлена в самую высокую ширину, найденную в том маршруте. Например, если маршрут имеет ширину, которая варьируется от 2 метров до 4 метров, приложение устанавливает ширину маршрута на 4 метра повсюду.
Дороги с маршрутом вводят информацию, указанную как driving'Граница' , restricted, shoulder, и parking поддерживаются. Маршруты с любой другой информацией о типе маршрута импортируются как маршруты границы.
Маршрут, отмечающий стили Bott Dots, Curbs, и Grass не поддерживаются. Маршруты с этими стилями маркировки импортируются как не отмеченные.
Ограничения экспорта ASAM OpenDRIVE
Кубический полином и параметрические типы геометрии кубического полинома в сценарии экспортируются как спиральные типы геометрии. Это вызывает некоторые изменения экспортируемой дорожной геометрии, если дорога является кривой дорогой.
Когда сегменты смежного перекрытия дорог друг с другом, приложение не экспортирует перекрывающиеся сегменты дорог.
Когда дорога с несколькими техническими требованиями маршрута имеет любой сегмент, содержащий только одну полосу, приложение не экспортирует несколько технических требований маршрута. Вместо этого технические требования первого дорожного сегмента применяются к целой дороге при экспорте.
Когда дорога с несколькими техническими требованиями маршрута содержит заострение между двумя дорожными сегментами, приложение экспортирует дорогу без заострения.
Когда дорога, состоящая из нескольких сегментов, соединяется с соединением, приложение не экспортирует дорогу.
Соединения дорожной сети обрабатываются без информации о связи маршрута, таким образом, формы соединения не могут быть точными в экспортируемом сценарии.
Приложение не экспортирует агента, который присутствует или на соединении или на дороге с несколькими дорожными сегментами.
Евро ограничения NCAP
Сценарии систем помощи скорости (SAS) не поддерживаются. Эти сценарии требуют обнаружения ограничений скорости от дорожных знаков, которые не поддерживает приложение.
3D ограничения отображения
Эти ограничения описывают, как визуализация 3D Display отличается от визуализации кубоида, которая появляется на Scenario Canvas.
Дороги не формируют перекрестки с неотмеченными маршрутами на пересечениях. Дороги и их перекрытие маркировок маршрута.
Не весь агент или цвета маркировки маршрута поддерживаются. 3D отображение совпадает с выбранным цветом к самому близкому доступному цвету, который это может представить.
Цвета шрифта маршрута неведущих маршрутов не поддерживаются. Если вы выбираете неведущий тип маршрута в 3D отображении, маршрут отображается как ведущий маршрут.
На вкладке Actors проигнорированы заданный Roll (°) и значения параметров Pitch (°) агента. В таблице Waypoints также проигнорированы значения z (m) (то есть, значения вертикального изменения). В процессе моделирования агенты следуют за вертикальным изменением и банковским углом дорожного покрытия.
Несколько стилей маркировки вдоль маршрута не поддерживаются. 3D отображение применяет первый стиль маркировки маршрута первого сегмента маршрута вдоль целой длины маршрута.
Агенты с 3D Display Type Cuboid не перемещайтесь в 3D отображение. В процессе моделирования эти агенты остаются стационарными в заданных положениях своей начальной буквы.
В ведущих сценариях actor является кубоидом объект, (имеющий форму поля) с определенной длиной, шириной и высотой. Агенты также имеют шаблон эффективной площади рассеивания (ЭПР), заданный в dBsm, который можно совершенствовать путем установки углового азимута и координат вертикального изменения. Положение агента задано как центр его нижней поверхности. Эта центральная точка используется в качестве вращательного центра агента, его точки контакта с землей и его источника в его системе локальной координаты. В этой системе координат:
X - ось указывает вперед от агента.
Y - точки оси, оставленные от агента.
Z - ось подчеркивает от земли.
Прокрутитесь, сделайте подачу, и рыскание по часовой стрелке положительно при взгляде в прямом направлении X - Y - и Z - оси, соответственно.
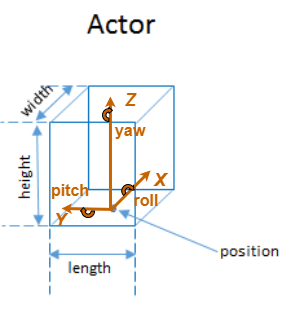
vehicle является агентом, который перемещается в колеса. Транспортные средства имеют три дополнительных свойства, которые управляют размещением их передней и задней оси.
Wheelbase — Расстояние между передними и задними осями
Front overhang — Расстояние между передней стороной транспортного средства и передней осью
Rear overhang — Расстояние между задней осью и задней частью транспортного средства
В отличие от других типов агентов, положение транспортного средства задано точкой на том основании, что ниже центра ее задней оси. Эта точка соответствует естественному центру вращения транспортного средства. Как с агентами нетранспортного средства, эта точка является источником в системе локальной координаты транспортного средства, где:
X - ось указывает вперед от транспортного средства.
Y - точки оси, оставленные от транспортного средства.
Z - ось подчеркивает от земли.
Прокрутитесь, сделайте подачу, и рыскание по часовой стрелке положительно при взгляде в прямом направлении X - Y - и Z - оси, соответственно.
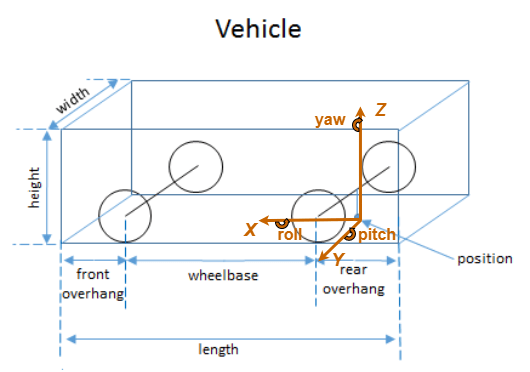
Источник (то есть, положение) транспортных средств кубоида отличается от источника транспортных средств в 3D среде симуляции. В 3D среде симуляции источники транспортного средства находятся на земле в геометрическом центре транспортного средства.
| Источник транспортного средства кубоида | 3D источник транспортного средства симуляции |
|---|---|
|
|
Для агентов нетранспортного средства источники идентичны и расположены в нижней части геометрического центра агентов.
В Simulink, чтобы преобразовать транспортное средство от источника кубоида до 3D источника симуляции, используют блок Cuboid To 3D Simulation. Для получения дополнительной информации о 3D координатах симуляции, смотрите Системы координат для Нереальной Симуляции Engine в Automated Driving Toolbox.
Эта таблица приводит опции именованного цвета, эквивалентные триплеты RGB и шестнадцатеричные цветовые коды, которые можно использовать для определения цвета маршрутов и маркировок на дороге.
| Название цвета | Краткое название | Триплет RGB | Шестнадцатеричный цветовой код | Внешний вид |
|---|---|---|---|---|
red | r | [1 0 0] | #FF0000 |
|
green | g | [0 1 0] | #00FF00 |
|
blue | b | [0 0 1] | #0000FF |
|
cyan
| c | [0 1 1] | #00FFFF |
|
magenta | m | [1 0 1] | #FF00FF |
|
yellow | y | [0.98 0.86 0.36] | #FADB5C |
|
black | k | [0 0 0] | #000000 |
|
white | w | [1 1 1] | #FFFFFF |
|
Создать дорогу при помощи road функционируйте, задайте дорожные центры как матричный вход. Функция создает направленную линию, которая пересекает дорожные центры, начинающие с координат в первой строке матрицы и заканчивающиеся в координатах в последней строке матрицы. Координаты в первых двух строках матрицы задают draw direction дороги. Эти координаты соответствуют первым двум последовательным дорожным центрам. Направление ничьей является направлением, в котором дороги представляют в графике сценария.
Чтобы создать дорогу при помощи приложения Driving Scenario Designer, можно или задать параметр Road Centers или в интерактивном режиме привлечь Scenario Canvas. Для подробного примера смотрите, Создают Ведущий Сценарий. В этом случае направление ничьей является направлением, в котором дороги представляют в Scenario Canvas.
Для дороги с направлением ничьей от начала до конца различие между x - координаты первых двух последовательных дорожных центров положительно.
Поскольку дорога с нижней частью к верхней части чертит направление, различие между x - координаты первых двух последовательных дорожных центров отрицательны.
|
|
|
Для дороги со слева направо чертят направление, различие между y - координаты первых двух последовательных дорожных центров положительны.
Для дороги со справа налево чертят направление, различие между y - координаты первых двух последовательных дорожных центров отрицательны.
|
|
|
Маршруты должны быть пронумерованы слева направо с левым краем дороги, заданной относительно направления ничьей дороги. Для односторонней дороги, по умолчанию, левый край дороги является чисто желтой маркировкой, которая указывает на конец дороги в поперечном направлении (перпендикуляр направления, чтобы чертить направление). Для двухсторонней дороги, по умолчанию, оба ребра отмечены чистыми белыми линиями.
Например, эти схемы показывают, как маршруты пронумерованы на односторонней и двухсторонней дороге с направлением ничьей сверху донизу.
| Нумерация маршрутов на Он-Вей-Роуд | Нумерация маршрутов на Туо-Вей-Роуд |
Задайте количество маршрутов как положительное целое число для односторонней дороги. Если вы устанавливаете целочисленное значение как 1, 2, 3 обозначает первые, вторые, и третьи маршруты дороги, соответственно.
| Задайте количество маршрутов как двухэлементный вектор из положительного целого числа для двухсторонней дороги. Если вы устанавливаете вектор как [ 1L обозначает единственный левый маршрут дороги. 1R и 2R обозначают первые и вторые правильные маршруты дороги, соответственно.
|
Технические требования маршрута применяются согласно порядку, в котором пронумерованы маршруты.
Составная маркировка маршрута включает два или больше сегмента маркера, которые задают несколько типов маркировки вдоль маршрута. Геометрические свойства для составной маркировки маршрута включают геометрические свойства каждого типа маркировки и нормированные длины сегментов маркера.
Порядок, в котором заданные сегменты маркера происходят в составной маркировке маршрута, зависит от направления ничьей дороги. Каждый сегмент маркера является направленным сегментом со стартовой точкой и двигает последний дорожный центр. Первый сегмент маркера начинает с первого дорожного центра и двигает последний дорожный центр заданной длины. Второй сегмент маркера начинает с конечной точки первого сегмента маркера и двигает последний дорожный центр заданной длины. Тот же процесс запрашивает каждый сегмент маркера, который вы задаете для составной маркировки маршрута. Можно установить нормированную длину для каждого из этих сегментов маркера путем определения range входной параметр.
Например, рассмотрите одностороннюю дорогу с двумя маршрутами. Вторая маркировка маршрута от левого края дороги является составной маркировкой маршрута маркировкой типов Solid и Dashed. Нормированная область значений для каждого типа маркировки 0.5. Первый сегмент маркера является серьезной маркировкой, и второй сегмент маркера является пунктирной маркировкой. Эти схемы показывают порядок, в котором сегменты маркера запрашивают слева направо и справа налево чертят направления дороги.
|
|
|
Для получения информации о геометрических свойствах маркировок маршрута см. Технические требования Маршрута.
Составная спецификация маршрута состоит из массива двух или больше технических требований маршрута для одной дороги. Каждая спецификация маршрута задает дорожный сегмент, который является разделом дороги с независимыми геометрическими свойствами, нормированной областью значений и заострением.
Каждый дорожный сегмент является направленным сегментом, который перемещается к итоговому дорожному центру, с первым сегментом, начинающимся в первом дорожном центре, второй запуск сегмента где первые концы, и так далее. Область значений каждого дорожного сегмента является нормированным расстоянием, которое задает пропорцию общей длины дороги. Когда дорожный сегмент добавляет или исключает маршруты из предыдущего сегмента, предыдущих заострений сегмента вдоль заданного расстояния, чтобы вместить изменение в количестве маршрутов.
Когда вы представляете дорогу с составными техническими требованиями маршрута, дорожные сегменты представляют в направлении ничьей дороги. Например, рассмотрите одностороннюю дорогу с двумя дорожными сегментами, и значение по умолчанию нормировало область значений 0,5 для каждого дорожного сегмента. Первый дорожный сегмент содержит четыре маршрута, и второй сегмент содержит только два маршрута. Первые заострения сегмента от четырех маршрутов до двух маршрутов, исключая одну полосу из каждой стороны, когда это приближается к средней точке дороги, которая является стартовой точкой второго сегмента. Эти схемы показывают направление, в котором дорожные сегменты представляют, и как заострение применяется к дороге, и для слева направо, и справа налево чертите направления.
|
|
|
Для получения информации о геометрических свойствах маршрутов см. Технические требования Маршрута.
При импортировании данных о карте области карты вы задаете и количество дорог, которые вы выбираете, оказывают прямое влияние на эффективность приложения. Чтобы улучшать производительность, задайте самые маленькие области карты и выберите наименьшее количество дорог, что необходимо создать ведущий сценарий.
Можно отменить (нажмите Ctrl+Z), и восстановление (нажимают Ctrl+Y) изменения вы делаете на холстах датчика и сценарии. Например, можно использовать эти ярлыки, чтобы удалить недавно размещенный дорожный центр или восстановить перемещение радарного датчика. Для большего количества ярлыков смотрите Горячие клавиши и Действия мыши для Driving Scenario Designer
В сценариях, которые содержат много агентов, чтобы отслеживать автомобиль, оборудованный датчиком, можно добавить индикатор вокруг транспортного средства. На панели инструментов приложения выберите Display> Show ego indicator. Круг вокруг автомобиля, оборудованного датчиком подсвечивает местоположение транспортного средства в сценарии. Этот круг не является зоной охвата датчика.
[1] Европейская новая автомобильная программа оценки. Евро протокол оценки NCAP - SA. Версия 8.0.2. Январь 2018.
[2] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP AEB C2C. Версия 2.0.1. Январь 2018.
[3] Европейская новая автомобильная программа оценки. Евро тестовый протокол NCAP LSS. Версия 2.0.1. Январь 2018.
drivingScenario | drivingRadarDataGenerator | visionDetectionGenerator | lidarPointCloudGenerator | insSensor[1] Необходимо заключить отдельное соглашение с HERE для того, чтобы получить доступ к сервисам HDLM и получить необходимые учетные данные (access_key_id и access_key_secret) для использования Сервиса HERE.
[2] Чтобы получить доступ к API 3.0 Карты Японии Zenrin (Itsumo NAVI API 3.0) сервис и получить необходимые учетные данные (клиентский ID и секретный ключ), необходимо заключить отдельное соглашение с ZENRIN DataCom CO., LTD.