Положение, обнаруживающее подсистему, читает моторное положение из блока Surface Mount PMSM и симулирует количества импульса энкодера QEP. Блок Surface Mount PMSM выводит механическое положение двигателя в rad/s.
Преобразуйте положение в области значений 0 к 2π rad/s к энкодеру QEP рассчитывает как показано в этом рисунке.
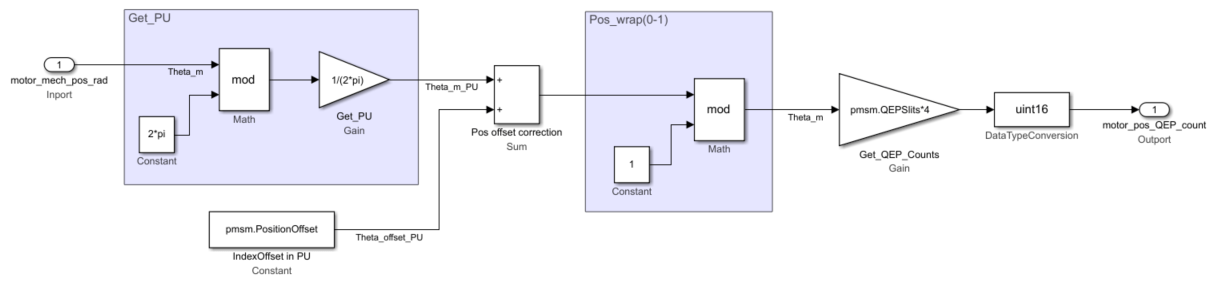
Для получения дополнительной информации об обнаружении смещения положения индекса QEP относительно ротора d - ось, смотрите Квадратурную Калибровку Смещения Энкодера для Двигателя PMSM.
