Блоки соединений обеспечивают два параметра приведения в действие. Эти параметры, Force/Torque и Motion, управляют, как соединение ведет себя в процессе моделирования. В зависимости от установок параметров вы выбираете, блок соединений может принять или параметр приведения в действие, как введено или автоматически вычислить его значение в процессе моделирования.
Дополнительная установка (None) позволяет вам устанавливать силу приводов / крутящий момент непосредственно обнулять. Объединенный примитив свободен перемещаться в процессе моделирования, но он не имеет никакого входа привода. Движение должно косвенно силам и крутящим моментам, действующим в другом месте в модели, или непосредственно к скоростным целям состояния.

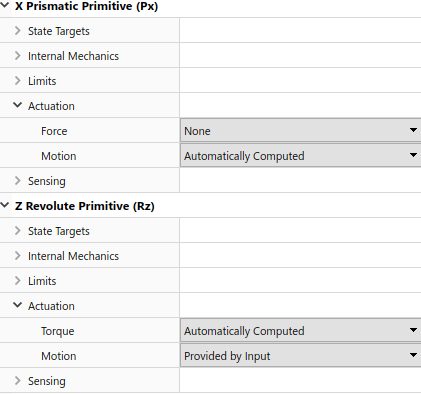
Как все параметры блока соединений, вы выбираете установки параметров приведения в действие для каждого объединенного примитива отдельно. Различные объединенные примитивы в том же блоке не должны совместно использовать те же настройки приведения в действие. Используя блок Pin Slot Joint, например, можно обеспечить вход движения и вычислять крутящий момент приведения в действие автоматически для Z Revolute Primitive (Rz) при наличии движения, автоматически вычисленного без силы приводов для X Prismatic Primitive (Px).
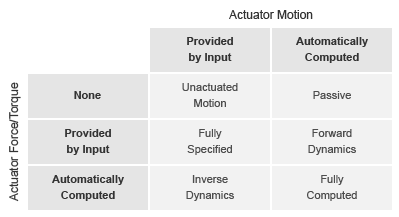
Путем объединения различного Force/Torque и настроек приведения в действие Motion, можно достигнуть различных объединенных режимов приведения в действие. Передайте динамику, и обратные режимы динамики являются двумя типичными примерами. Вы приводите в движение объединенный примитив в прямом режиме динамики путем обеспечения силы приводов / крутящий момент, как введено при наличии движения, автоматически вычисленного. С другой стороны вы приводите в движение объединенный примитив в обратном режиме динамики путем обеспечения движения, как введено при наличии силы приводов / крутящий момент, автоматически вычисленный.
Другие объединенные режимы приведения в действие, включая полностью вычисленные и полностью заданные режимы, возможны. Таблица суммирует различные режимы приведения в действие, которые можно получить путем управления установками параметров приведения в действие.
Объединенные режимы приведения в действие
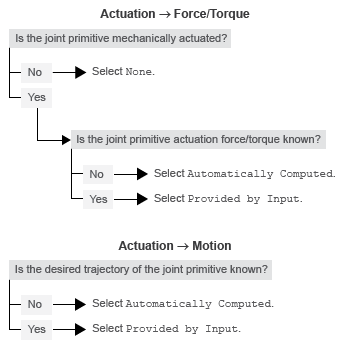
В более общем плане, думая об объединенном приведении в действие в терминах заданных или расчетных количеств — i.e., сила/крутящий момент и движение — обеспечивают более практический подход моделирования. Вы не можете всегда знать соответствующий режим для соединения, но, запланировав модель заранее, необходимо всегда знать ответы на два вопроса:
Действительно ли соединение примитивно механически приводимое в движение?
Желаемая траектория объединенного примитива известна?
Путем выбора объединенных настроек приведения в действие на основе ответов на эти вопросы можно гарантировать, что каждое соединение правильно установлено для приложения. Рисунок показывает соответствующие настройки в зависимости от ваших ответов.
Выбор объединенных примитивных настроек приведения в действие
Вход движения объединенного примитива является объектом timeseries, указывающим что траектория примитива. Для призматического примитива та траектория является координатой положения вдоль примитивной оси, данной в зависимости от времени. Координата обеспечивает положение системы координат последователя относительно источника базовой системы координат. Примитивная ось разрешена в базовой системе координат.
Для вращательного примитива траектория является углом о примитивной оси, данной в зависимости от времени. Этот угол обеспечивает вращение системы координат последователя относительно базовой системы координат о примитивной оси. Ось разрешена в базовой системе координат.
Сферические объединенные примитивы не предоставляют возможностей приведения в действие движения. Можно задать крутящий момент приведения в действие для этих примитивов, но вы не можете предписать их траектории. Те траектории всегда автоматически вычисляются из динамики модели в процессе моделирования.
В отличие от Actuation> Force/Torque, Actuation> параметр Motion не предоставляет нулевой входной возможности, соответствуя фиксированному объединенному примитиву в процессе моделирования. Можно, однако, предписать нулевое движение тем же путем, вы предписываете все другие типы движения: использование Simscape™ и Simulink® блоки.
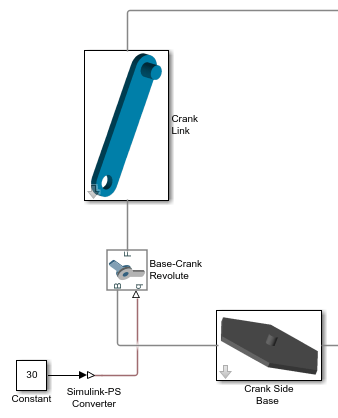
В Simscape Multibody™ входные сигналы движения центральны положением. Вы задаете объединенное примитивное положение и, если отфильтровано к второго порядка, блок Simulink-PS Converter сглаживает сигнал при обеспечении его двух производных времени автоматически. Это поведение делает нулевое предписание движения прямым: только предоставьте постоянный сигнал входному порту приведения в действие движения объединенного примитива и симулируйте.
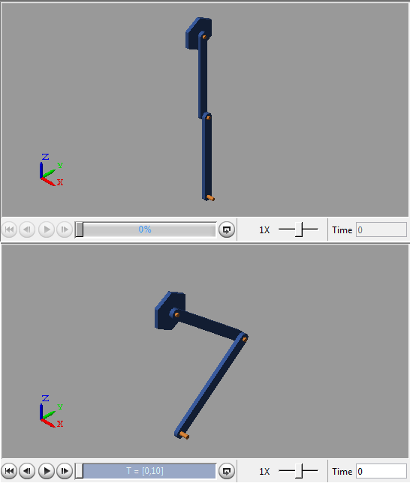
Рисунок показывает пример предписания нулевого движения. Блок Simulink Constant вводит постоянное значение положения. Блок Simulink-PS Converter преобразует этот Сигнал Simulink в сигнал Simscape, совместимый с входным портом приведения в действие движения блока Base-Crank Revolute Joint. Предположение, что блок и симуляция успешны, это совместное завещание обеспечивает фиксированный угол 30 градусов, соответствуя набору значений в блоке Simulink Constant и модульному набору в блоке Simulink-PS Converter.
При предписании объединенной примитивной траектории это практично, чтобы задать один вход, положение и фильтр, которые вводят использование блока Simulink-PS Converter. Этот фильтр, который должен быть второго порядка, автоматически обеспечивает в два раза производные входа движения. Поскольку это также сглаживает входной сигнал, фильтр может помочь предотвратить проблемы симуляции из-за внезапных изменений, или разрывы, такие как те представляют при использовании блока Simulink Step.
Фильтрация сглаживает входной сигнал по масштабу времени порядка входа, фильтрующего постоянную времени. Чем больше постоянная времени, тем больше сглаживание сигнала и более искаженный сигнал имеют тенденцию стать. Чем меньший постоянная времени, тем ближе отфильтрованный сигнал к входному сигналу, но также и чем больше жесткость модели — и, следовательно, тем медленнее симуляция.
Как инструкция, вход, фильтрующий постоянную времени, должен только как быть малым как самый маленький соответствующий масштаб времени в модели. По умолчанию его значение составляет 0,001 с. В то время как соответствующее для многих моделей, это значение часто слишком мало для моделей Simscape Multibody. Для более быстрой симуляции начните со значения 0,01 с. Уменьшите это значение для большей точности.
Если вы знаете в два раза производные входного сигнала движения, можно задать их непосредственно. Этот подход является самым удобным для простых траекторий с простыми производными. Необходимо, однако, гарантировать, что два производных сигнала совместимы с сигналом положения. Если они не, даже когда симуляция продолжает, результаты могут быть неточными.
Соединения Simscape Multibody с входными параметрами движения запускают симуляцию (Ctrl+T) в исходном положении, продиктованном входным сигналом. Это исходное положение может отличаться от собранного состояния, которым управляет алгоритм блока, оптимизированный, чтобы соответствовать положениям шарниров, если таковые имеются. Даже в отсутствие положений шарниров, собранное состояние может отличаться от в нуле времени симуляции.
Примечание
Вы получаете собранное состояние каждый раз, когда вы обновляете блок-схему, e.g., путем нажатия Ctrl+D. Вы получаете начальное состояние симуляции каждый раз, когда вы запускаете симуляцию, e.g., путем нажатия Ctrl+T и приостановки в начальный момент времени.
Из-за несоответствия между двумя состояниями, Отчет Модели обеспечивает точные данные о начальном состоянии только для моделей, испытывающих недостаток во входных параметрах движения. Для моделей, обладающих входными параметрами движения, те данные точны только, когда исходное положение, предписанное входным сигналом движения точно, совпадает с исходным положением, предписанным в положениях шарниров.
Точно так же Mechanics Explorer отображает начальные объединенные состояния точно только для моделей, испытывающих недостаток во входных параметрах движения. Когда это переходит от собранного состояния до начального состояния симуляции, Mechanics Explorer может показать внезапный скачок, если модель содержит входные параметры движения, которые несовместимы с положениями шарниров. Можно устранить внезапное изменение путем создания исходного положения предписанным входными параметрами совместного движения равный исходному положению предписанный положениями шарниров.
При фильтрации входного сигнала с помощью блока Simulink-PS Converter необходимо только обеспечить сигнал положения. Блок автоматически вычисляет производные. Необходимо, однако, выбрать просачивание второго порядка диалогового окна блока:
Откройте диалоговое окно блока Simulink-PS Converter и нажмите Input Handling.
В Filtering and derivatives выберите Filter input.
В Input filtering order выберите Second-order filtering.
В Input filtering time constant (in seconds) введите характеристическое время, за которое фильтр сглаживает сигнал. Хорошим начальным значением является 0.01 секунды.
При обеспечении входных производных непосредственно, необходимо сначала вычислить те производные. Затем с помощью блока Simulink-PS Converter можно предоставить их целевому блоку соединений. Задавать входные производные непосредственно:
Откройте блок Simulink-PS Converter, получающий входной сигнал, и кликните по вкладке Input Handling.
В Filtering and derivatives выберите Provide input derivative(s).
Чтобы задать обе производные, в Input derivatives, выбирают Provide first and second derivatives.
Блок отображает два дополнительных порта физического сигнала, один для каждой производной.
