Движение дерева твердого тела модели, данное входные параметры пробела задачи
Robotics System Toolbox / Алгоритмы Манипулятора
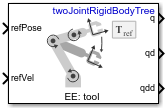
Блок Task Space Motion Model моделирует движение пробела задачи с обратной связью манипулятора в виде rigidBodyTree объект. Поведение модели движения задано с помощью управления пропорциональной производной (PD).
Для получения дополнительной информации об уравнениях движения, см. Модель Движения Пробела Задачи.
[1] Крэйг, Джон Дж. Введение в робототехнику: механика и управление. Верхний Сэддл-Ривер, NJ: образование Пирсона, 2005.
[2] Spong, Марк В., Сет Хатчинсон и Матукумалли Видйязагар. Моделирование робота и управление. Хобокен, NJ: Вайли, 2006.

