Режим Connected IO и режимы Accelerator запускают алгоритм симуляции в Simulink® и доступ внешнее оборудование при помощи драйверов, запускающихся в режиме ядра операционной системы. Диаграмма Simulink является пользовательским интерфейсом к вашему приложению реального времени.
Режим Run in Kernel соединяет вашу модель Simulink с вашим приложением реального времени. Можно использовать Диаграмму Simulink в качестве пользовательского интерфейса, как вы можете в режиме Connected IO или режиме Accelerator.
Эта процедура использует модель sldrtex_model. Чтобы открыть эту модель, в командном окне MATLAB, введите:
open_system(docpath(fullfile(docroot,'toolbox',... 'sldrt','examples','sldrtex_model')))
Это принимает, что вы уже загрузили ту модель.
После того, как вы создали приложение реального времени, можно ввести параметры осциллографа для трассировки сигнала с режимом Simulink Run in Kernel:
В Редакторе Simulink, на вкладке Desktop Real-Time, нажимают Prepare> Hardware Settings.
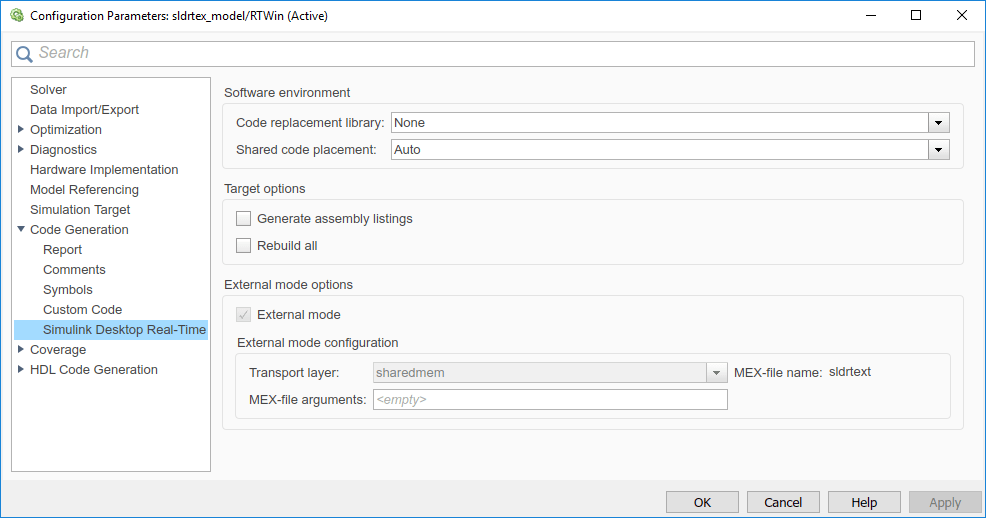
В диалоговом окне Configuration Parameters выберите Code Generation> узел Simulink Desktop Real-Time.
Если вы устанавливаете флажок External mode, ваши изменения влияют на приложение реального времени.
Проверяйте, что метка MEX-file name имеет запись sldrtext. Файл MEX sldrtext.mex* предоставляется программным обеспечением Simulink Desktop Real-Time™. Этот файл работает с режимом Simulink Run in Kernel и поддержками, загружающими данные сигнала и загружающими значения параметров.
Нажмите OK.
В Редакторе Simulink, на вкладке Desktop Real-Time, нажимают Prepare> Control Panel. В Панели управления Режима external mode нажмите кнопку Signal & Triggering.
Установите флажок Select all. Из списка Source выберите manual. Из списка Mode выберите normal.
X под Signal selection указывает, что сигнал помечен для сбора данных. T указывает, что сигнал помечен как триггерный сигнал.
В поле Duration введите номер точек выборки в буфере данных. Например, чтобы задать частоту дискретизации 1 000 выборок/секунда и время остановки 10 секунд, введите:
10000
Установите флажок Arm when connecting to target.
Если вы не устанавливаете этот флажок, данные не отображены в окне Scope.

Нажмите Close.
