Модели архитектуры в System Composer™ описывают систему на разных уровнях абстракции. Этот мобильный пример робота представляет три архитектуры:
Функциональная архитектура описывает высокоуровневые функции.
Аппаратная архитектура описывает физическое оборудование или платформу, необходимую для робота.
Логическая архитектура описывает обмен данными.
Чтобы получить доступ к моделям и вспомогательным файлам, используемым в этом примере, смотрите, Симулируют Мобильного Робота с Рабочим процессом System Composer.
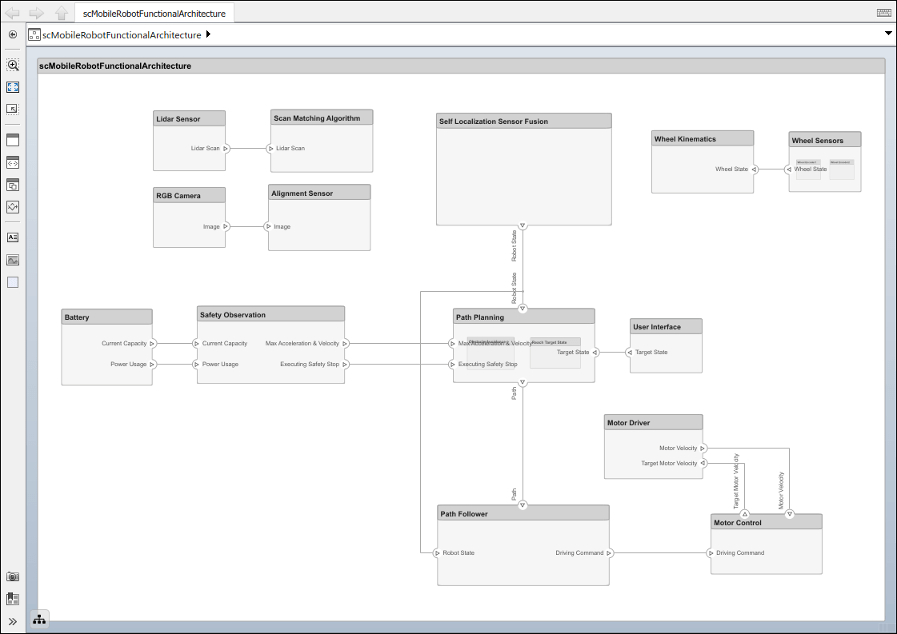
Модель функциональной архитектуры описывает функциональные зависимости: управляя мобильным роботом автономно, локализацией, планированием пути и следованием траектории. Чтобы открыть модель функциональной архитектуры, дважды кликните файл или введите эту команду в MATLAB® Командное окно.
% Open the functional architecture model for the mobile robot systemcomposer.openModel('scMobileRobotFunctionalArchitecture');
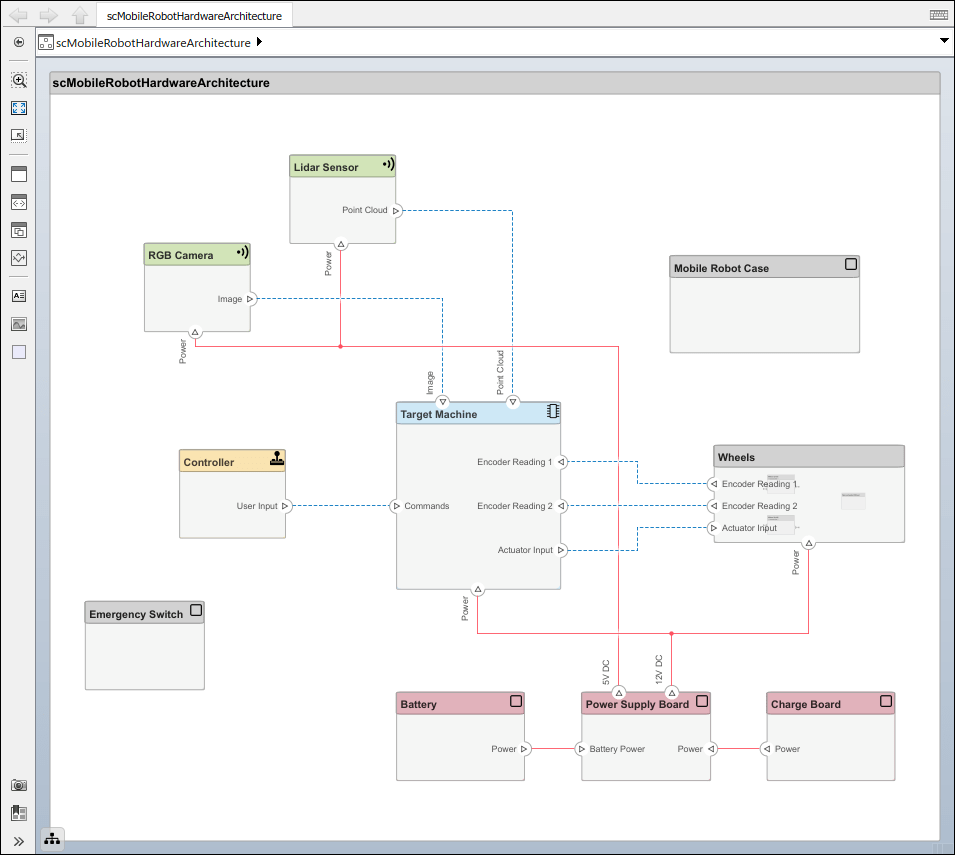
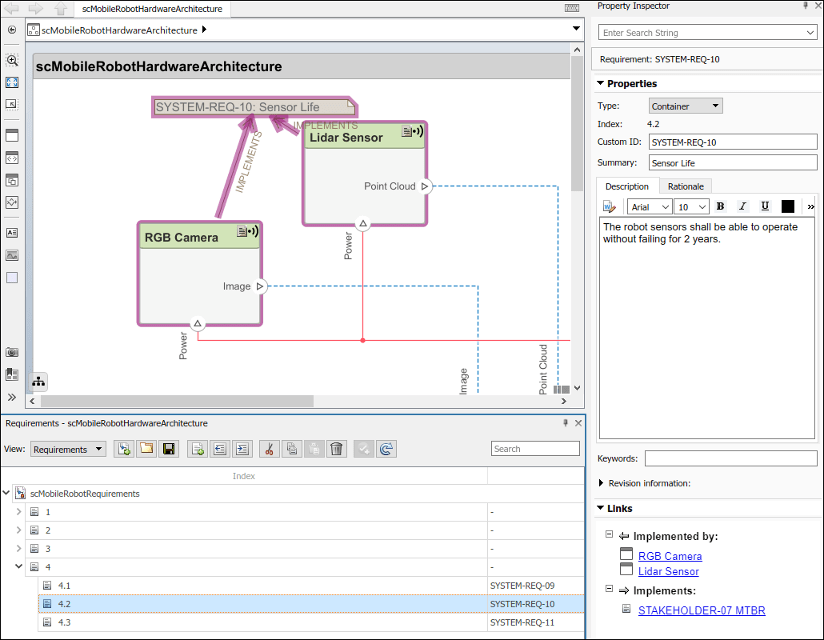
Модель аппаратной архитектуры описывает аппаратные компоненты — датчик, приводы, и встраиваемый процессор — и их связи. Цвета и значки указывают на стереотипы, используемые для каждого элемента. Чтобы открыть модель аппаратной архитектуры, дважды кликните файл или введите эту команду в командное окно MATLAB.
% Open the hardware architecture model for the mobile robot systemcomposer.openModel('scMobileRobotHardwareArchitecture');
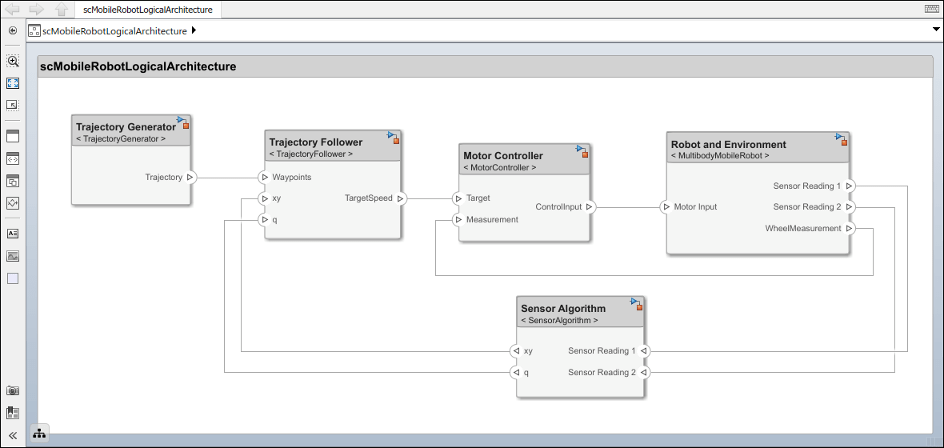
Модель логической архитектуры описывает поведение мобильной системы робота — генератора траектории, последователя траектории, моторного диспетчера, алгоритма датчика, и робота и среды — для симуляции. Связи представляют взаимодействия в системе. Чтобы открыть модель логической архитектуры, дважды кликните файл или введите эту команду в командное окно MATLAB.
% Open the logical architecture model for the mobile robot systemcomposer.openModel('scMobileRobotLogicalArchitecture');
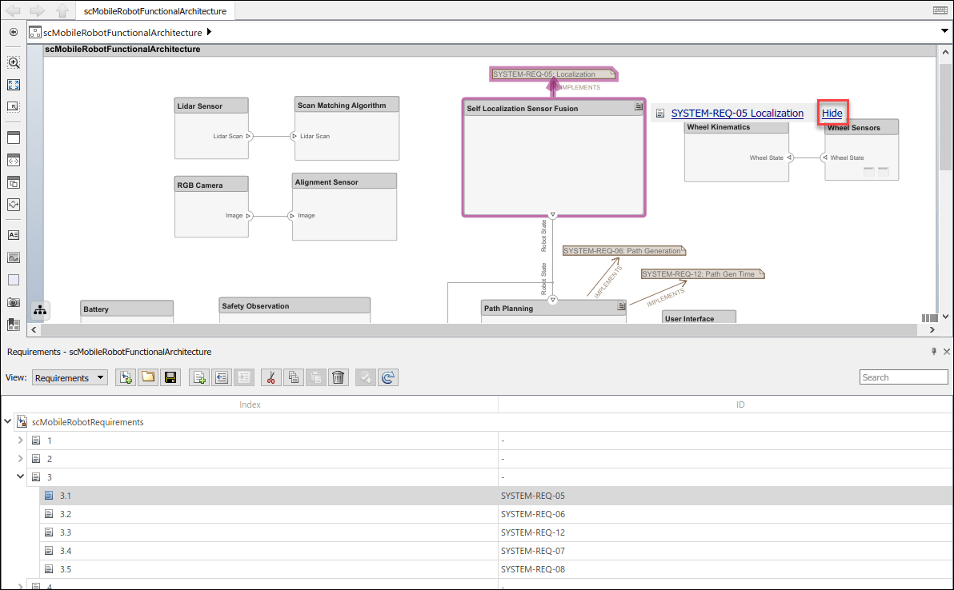
Трассируемость требования включает соединение технических требований к компонентам и портам в моделях архитектуры, таким образом, позволяя связь между ранней фазой требований и разработкой системы. Можно легко отследить, удовлетворяется ли требование путем соединения компонентов назад с потребностями заинтересованной стороны. Можно добавить ссылки требования путем перетаскивания требований к компоненту.
Чтобы просмотреть требования, откройте менеджера по Требованиям путем навигации к Apps> Requirements Manager.
Self Localization Sensor Fusion компонент в модели функциональной архитектуры реализует требование Локализации, SYSTEM-REQ-05. Чтобы показать или скрыть связанные требования, кликните по значку требования на верхнем правом углу компонента.
Можно просмотреть требования, соединенные с моделью аппаратной архитектуры в Браузере Требований. После выбора SYSTEM-REQ-10, только требования, связанные с Жизнью Датчика, показывают.
Для получения дополнительной информации о соединении требований смотрите Требования Ссылки и Трассировки.
Можно выделить функциональные компоненты аппаратным компонентам с помощью выделений от модели к модели в Редакторе Выделения. Чтобы открыть Редактор Выделения, перейдите к Modeling> Views> Allocation Editor или введите эту команду в командное окно MATLAB.
% Open the Allocation Editor systemcomposer.allocation.editor % Load the allocation set allocSet = systemcomposer.allocation.load('scAllocationFunctionalHardware');
Нажмите на Scenario 1. Выберите Component в разделах Column Filter и Row Filter. Редактор Выделения позволяет вам соединять компоненты между различными моделями архитектуры, чтобы установить трассируемость для вашего проекта. Дважды кликните поля в матрице выделения, чтобы выделить или освободить два элемента.
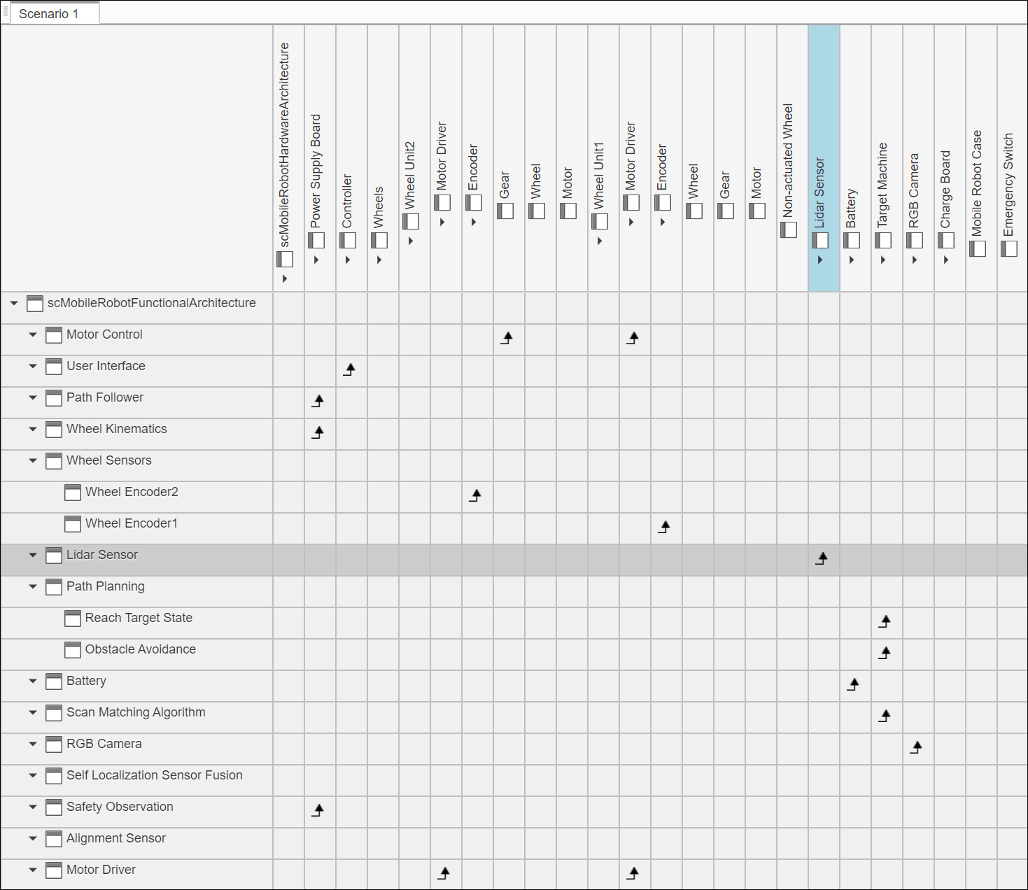
Автономия транспортного средства в основном обработана целевой машиной, которая является встроенным компьютером, ответственным за обработку показаний датчика, чтобы вычислить входные параметры управления. Поэтому много функциональных компонентов как Path Follower, Wheel Kinematics, и Scan Matching Algorithms выделяются Target Machine компонент в модели аппаратной архитектуры. Можно также добавить выделения для портов и коннекторов. Для получения дополнительной информации смотрите, Выделяют Архитектуры в Системе мониторинга Давления воздуха в шине.
allocate | addComponent | addPort | connect
