Местоположение орбиты интереса с помощью UAV
UAV Toolbox / Алгоритмы
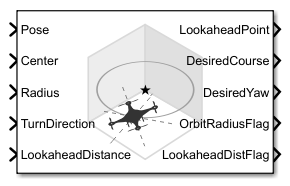
Блок Orbit Follower генерирует курс и средства управления рысканием для следующего круговая орбита вокруг местоположения интереса на основе текущего положения (БПЛА) беспилотного воздушного транспортного средства. Выберите UAV type БПЛА мультиротора или фиксированного крыла. Можно задать любое местоположение центра орбиты, радиус орбиты, и повернуть направление. Предварительное расстояние, LookaheadDistance, используется для настройки отслеживания пути и генерации LookaheadPoint выход.
ode45 | control | derivative | environment | state | plotTransforms
