Computer Vision Toolbox™ предоставляет алгоритмы, функции и приложения для проектирования и тестирования систем компьютерного зрения, 3D-зрения и обработки видео. Можно выполнить обнаружение объектов и отслеживание, а также выявление признаков, экстракцию и соответствие. Можно автоматизировать калибровочные рабочие процессы для одного, стерео, и fisheye-камеры. Для 3D-видения тулбокс поддерживает визуальный и облако точек SLAM, видение стерео, структура от движения и обработка облака точек. Приложения компьютерного зрения автоматизируют рабочие процессы разметки достоверных данных и калибровки фотоаппарата.
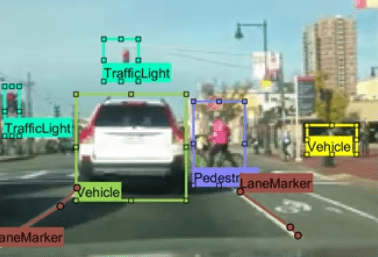
Можно обучить детекторы пользовательского объекта с помощью глубокого обучения и алгоритмов машинного обучения, таких как YOLO v2, SSD и ACF. Для семантического и сегментации экземпляра, можно использовать алгоритмы глубокого обучения, такие как U-Net и Маска R-CNN. Тулбокс обеспечивает обнаружение объектов и алгоритмы сегментации для анализа изображений, которые являются слишком большими, чтобы поместиться в память. Предварительно обученные модели позволяют вам обнаружить лица, пешеходов и другие общие объекты.
Можно ускорить алгоритмы путем выполнения их на многоядерных процессорах и графических процессорах. Алгоритмы тулбокса поддерживают генерацию кода C/C++ для интеграции с существующим кодом, анализом прототипа и развертыванием системы компьютерного зрения.
Оцените параметры объектива и датчика изображения картинки или видеокамеры.
Решите который приложение использовать, чтобы пометить достоверные данные: Image Labeler, Video Labeler, Ground Truth Labeler, Lidar Labeler, Signal Labeler или Audio Labeler.
Сравнение детекторов объектов
Выберите правильный рабочий процесс одновременной локализации и картографии (SLAM) и найдите темы, примеры и поддерживавшие функции.
Обнаружение объектов с помощью глубоких нейронных сетей.
Сегментация объектов по классам с использованием глубокого обучения.
Изучите, как использовать облака точек для глубокого обучения.
Изучите рабочий процесс отображения и регистрация облака точек.
Узнайте о преимуществах и приложениях локального обнаружения и извлечения объектов.
Приложения Computer Vision Toolbox
Проектирование и тестирование компьютерного зрения, 3-D видение и системы обработки видеоданных
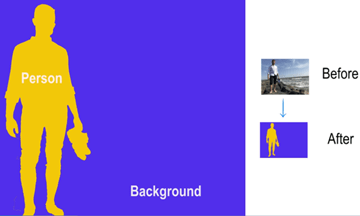
Семантическая Сегментация
Изображения сегмента и 3D объемы путем классификации отдельных пикселей и сетей использования вокселей, таких как SegNet, FCN, U-Net и DeepLab v3 +
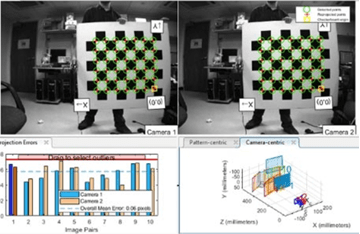
Калибровка фотоаппарата в MATLAB
Автоматизируйте обнаружение шахматной доски и калибруйте крошечное отверстие и fisheye-камеры с помощью приложения Camera Calibrator







