Найдите углы с помощью алгоритма Харриса или FAST
Vision HDL Toolbox / Analysis & Enhancement
Блок Corner Detector обнаруживает углы при помощи алгоритма от ускоренного теста сегмента (FAST) функций или пересекающимися ребрами (Харрис) алгоритм. Для каждого пикселя, если пиксель является углом, блок возвращает угловую метрику. Если пиксель не является углом, блок возвращает пиксельное значение нуля.
Алгоритм FAST тестирует круговую область вокруг потенциального центра угла. Тест обнаруживает угол, если непрерывный раздел пикселей является или более ярким, чем центр плюс порог или более темным, чем центр минус порог. Можно задать минимальный контрастный порог в качестве параметра или порт и выбор из трех правил задать угол. Эти правила задают, сколько пикселей в кругу пикселей должно превысить минимальный контраст для центрального пикселя, который будет рассмотрен углом. Блок выполняет параллельные тесты всех комбинаций непрерывных пикселей вокруг круга. FAST использует очень небольшие аппаратные ресурсы
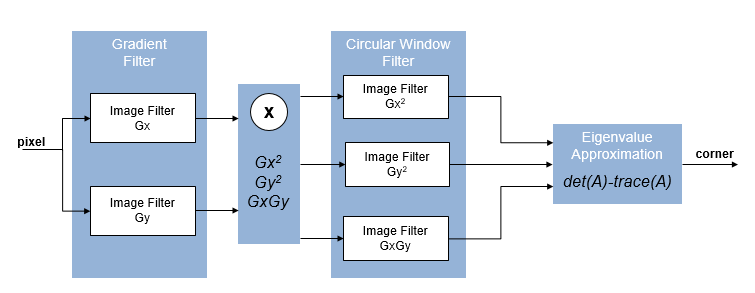
Алгоритм Харриса вычисляет горизонтальные и вертикальные градиенты, фильтрует компоненты градиента с круговым Гауссовым фильтром 5 на 5 и вычисляет метрику, которая представляет силу угла. Можно задать порог, который определяет уровень, на котором обнаруживаются углы. Блок возвращает угол для пикселей, где метрика превышает этот порог. Алгоритм Харриса использует больше аппаратных ресурсов, чем Алгоритм FAST, но может обнаружить углы, которые не может найти Алгоритм FAST.
Этот блок использует пиксельный интерфейс потоковой передачи с pixelcontrol соедините шиной для сигналов управления кадром. Этот интерфейс позволяет блоку действовать независимо от размера изображения и формата. Все блоки Vision HDL Toolbox™ используют тот же интерфейс потоковой передачи. Блок принимает и возвращает скалярное пиксельное значение и шину, которая содержит пять управляющих сигналов. Управляющие сигналы указывают на валидность каждого пикселя и его местоположения в системе координат. Чтобы преобразовать систему координат (пиксельная матрица) в последовательный пиксельный поток и управляющие сигналы, используйте блок Frame To Pixels. Для полного описания интерфейса смотрите Пиксельный Интерфейс Потоковой передачи.
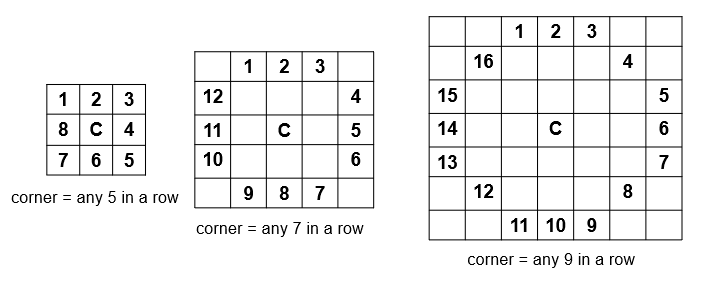
Method — Метод обнаруженияFAST 5 of 8 (значение по умолчанию) | FAST 7 of 12 | FAST 9 of 16 | HarrisВыберите алгоритм Харриса или размер круга для Алгоритма FAST. Три опции FAST задают, сколько непрерывных пикселей на круге должно превысить порог для центрального пикселя, который будет отмечен как угол. Для кругов 8, 12, и 16 пикселей, показанных на этих рисунках, блок обнаруживает угол, когда 5, 7, или 9 непрерывных пикселей, соответственно, выше порога. Проверки блока на это количество непрерывных пикселей где угодно на круге. Блок использует ядро размера, 3х3 для FAST 5 of 8, 5 на 5 для FAST 7 of 12, и 7 7 для FAST 9 of 16.
Source of minimum contrast value — Источник для порога, который указывает на угол для Алгоритма FASTProperty (значение по умолчанию) | Input portЗадайте Property устанавливать порог при помощи параметра MinContrast value. Задайте Input port включить порт minC.
Чтобы включить этот параметр, установите параметр Method на одну из опций FAST.
MinContrast value — Порог, который указывает на угол для Алгоритма FASTКаждый пиксель в кругу вычтен из центрального пиксельного значения, и только те различия, которые превышают этот порог, используются, чтобы определить, является ли центральный пиксель углом и вычислить выходную метрику. Это значение снято к совпадающему типу данных как вход pixel.
Чтобы включить этот параметр, установите параметр Method на одну из опций FAST и установите параметр Source of minimum contrast value на Property.
Source of threshold value — Источник для порога, который указывает на угол для алгоритма ХаррисаProperty (значение по умолчанию) | Input portЗадайте Property устанавливать порог при помощи параметра Threshold value. Задайте Input port включить порт thresh.
Чтобы включить этот параметр, установите параметр Method на Harris.
Threshold value — Порог, который указывает на угол для алгоритма ХаррисаЭто значение представляет приближение собственных значений матрицы Харриса, вычисленной от результатов градиента. Блок возвращает угол для пикселей, где метрика превышает этот порог. Для получения дополнительной информации смотрите пример детектирования углов методом Харриса. Это значение снято к совпадающему типу данных как выход corner. Угловая метрика находится в области значений четвертой степени значений входного пикселя. Например, для 8-битного входного пикселя, выходной размер полной точности составляет 44 бита.
Чтобы включить этот параметр, установите параметр Method на Harris и установленный параметр Source of threshold value на Property.
Line buffer size — Размер буфера линииРазмер буфера памяти линии в виде положительного целого числа. Выберите степень двойки, которая вмещает количество активных пикселей в горизонтальной линии. Если вы задаете значение, которое не является степенью двойки, буфер использует следующую самую большую степень двойки.
Блок выделяет (N – 1)-by-Line buffer size ячейки памяти, чтобы сохранить пиксели. N является размером ядра.
Блок использует ядро размера, 3х3, когда параметром Method является FAST 5 of 8, 5 на 5, когда Method является FAST 7 of 12, и 7 7 когда Method является FAST 9 of 16.
Когда вы устанавливаете Method на Harris, блок использует тот 1 3 ядро и одно ядро 3 на 1 для вычисления градиента и три ядра 5 на 5 для кругового фильтра окна на трех компонентах градиента.
Padding method — Метод для дополненияSymmetric (значение по умолчанию) | Replicate | Reflection | NoneВыберите один из этих методов для дополнения контура входного изображения. Для получения дополнительной информации об этих методах, смотрите, что Ребро Дополняет.
Replicate — Повторите значение пикселей в ребре изображения.
Symmetric — Установите значение дополнительных пикселей, чтобы зеркально отразить ребро изображения. Эта опция препятствует тому, чтобы ребра были обнаружены на контурах активной системы координат.
Reflection — Установите значение дополнительных пикселей, чтобы отразиться вокруг пикселя в ребре изображения.
None — Исключите дополнительную логику. Блок не устанавливает пиксели вне фрейма изображения ни к какому конкретному значению. Эта опция уменьшает аппаратные ресурсы, используемые блоком и очищением, требуемым между системами координат, но влияет на точность выходных пикселей в ребрах системы координат. Чтобы обеспечить пиксельную потоковую синхронизацию, выходная система координат одного размера с входным кадром. Однако избегать использования пикселей, вычисленных от неопределенных дополнительных значений, маски от KernelSize/2 пиксели вокруг ребра системы координат для нисходящих операций. Для получения дополнительной информации смотрите Пропускную способность Увеличения с Дополнением Ни одного.
Круговые фильтры окна, используемые в алгоритме Харриса, заполняют ребра системы координат с помощью Replicate дополнение.
Rounding mode — Округление метода для внутренних вычислений фиксированной точкиFloor (значение по умолчанию) | Ceiling | Convergent | Nearest | Round | ZeroЗадайте метод округления для внутренних вычислений фиксированной точки.
Saturate on integer overflow — Действие переполнения для внутренних вычислений фиксированной точкиoff (значение по умолчанию) | onКогда вы очищаете этот параметр, фиксированная точка и целочисленные значения повторяются, чтобы обнулить, когда значение переполняет того, что является представимым с тем типом данных. Когда вы выбираете этот параметр, значение насыщает в максимальном представимом значении.
Output Data Type — Тип данных для выходного порта cornerInherit same as first input (значение по умолчанию) | выражение типа данных | Inherit via internal ruleЗадайте тип данных для порта выхода corner. По умолчанию блок возвращает угловую метрику использование совпадающего типа данных как порт входа pixel.
Когда вы используете блок с внутренним буфером линии в Enabled Subsystem (Simulink), разрешать шаблон сигнала должен обеспечить синхронизацию пиксельного потока, включая минимальные интервалы гашения. Если разрешать шаблон повреждает синхронизацию пиксельного потока, вы можете видеть частичные выходные системы координат, поврежденные пиксельные потоковые управляющие сигналы или несоответствия между Simulink® и результаты симуляции HDL. Вы, возможно, должны расширить интервалы гашения, чтобы вместить для циклов, когда разрешение является низким. Для получения дополнительной информации смотрите, Конфигурируют Интервалы гашения.
Когда блок реализует Алгоритм FAST, он использует однострочный буфер, чтобы извлечь окна ядра. Алгоритм вычитает центральный пиксель ядра от каждого из круговых пикселей. Для схем ядра смотрите параметр Метода. Каждый результат сравнивается со значением minContrast. Когда необходимое количество последовательных пикселей превышает порог, центр отмечен как угол, и блок вычисляет сумму абсолютной разности (SAD) метрика для круга. Только те различия, которые превышают минимальный контрастный порог, включены в метрику. Пиксели, состоящие из нескольких несмежных участков, также включены в метрику. Это вычисление означает, что алгоритм обнаруживает легкий центральный пиксель, окруженный темными пикселями или темным центральным пикселем, окруженным светлыми пикселями как углы с высокими метриками. Чтобы оптимизировать аппаратную эффективность, алгоритм является конвейерным между каждым добавлением, или вычтите операции.
Алгоритм Харриса использует пять фильтров изображений, чтобы вычислить эти два градиента и три круговых окна. Вычисление приближения собственного значения матрицы Харриса использует три множителя и три сумматора и является конвейерным, чтобы оптимизировать аппаратную эффективность. Схема показывает архитектуру алгоритма Харриса, где A является матрицей Харриса.
Для дополнительных деталей алгоритма Харриса смотрите пример детектирования углов методом Харриса.
[1] "ВЫСОКОСКОРОСТНОЕ ВЫЯВЛЕНИЕ ПРИЗНАКОВ ИЗОБРАЖЕНИЙ ИСПОЛЬЗУЯ РЕАЛИЗАЦИЮ FPGA АЛГОРИТМА FAST": продолжения Конференции Третьего Интернационала по Теории Компьютерного зрения и Приложениям, SciTePress - Публикации Науки и техники, 2008, стр 174–79. doi:10.5220/0001080801740179.
[2] Rosten, E. и Т. Драммонд. “Плавя Точки и Линии для Высокопроизводительного Отслеживания”. Продолжения Международной конференции IEEE по вопросам Компьютерного зрения, издания 2, 2005, стр 1508–11.
[3] Rosten, E. и Т. Драммонд. "Машинное обучение для Высокоскоростного Углового Обнаружения". Компьютерное зрение - Примечания Лекции ECCV 2006 в Информатике, 2006, 430-43. doi:10.1007/11744023_34.
[4] Харрис, C. и М. Стивенс. “Объединенный Детектор Угла и Ребра”. В Продолжениях Конференции по Видению Alvey 1988, 23.1-23.6. Манчестер: Клуб Видения Alvey, 1988. DOI.org (Crossref), doi:10.5244/C.2.23.


