Осуществите сектор, привязал определенную карту ввода/вывода при использовании Control System Tuner.
Коническая Цель Сектора создает ограничение, которое ограничивает выходные траектории системы. Если для всех ненулевых входных траекторий u (t), выходная траектория z (t) = (Hu) (t) линейной системы H удовлетворяет:
для всего T ≥ 0, затем выходные траектории H лежат в коническом секторе, описанном симметричным неопределенным матричным Q. Выбор различных матриц Q налагает различные условия на отклик системы. Когда вы создаете Коническую Цель Сектора, вы задаете входные сигналы, выходные сигналы и геометрию сектора.
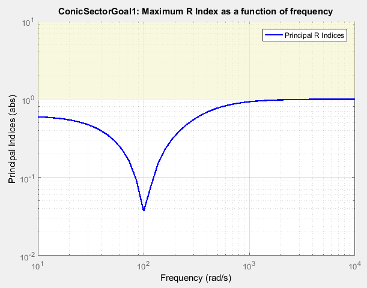
В Control System Tuner заштрихованная область на графике представляет область в частотном диапазоне, в котором не удовлетворяют настраивающейся цели. График показывает значение R - индекс, описанный приблизительно в Границах Сектора и индексах Сектора.
Во вкладке Tuning Control System Tuner выберите New Goal> Conic Sector Goal.
При настройке систем управления в командной строке используйте TuningGoal.ConicSector задавать цель переходного процесса.
Используйте этот раздел диалогового окна, чтобы задать вводы и выводы передаточной функции, которую ограничивает настраивающаяся цель. Также задайте любые местоположения в который к разомкнутым контурам для оценки настраивающейся цели.
Specify input signals
Выберите одно или несколько местоположений сигнала в своей модели как входные параметры к передаточной функции, которую ограничивает настраивающаяся цель. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Например, чтобы ограничить усиление от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'u'. Чтобы ограничить пассивность ответа MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Specify output signals
Выберите одно или несколько местоположений сигнала в своей модели как выходные параметры передаточной функции, которую ограничивает настраивающаяся цель. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить усиление от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'y'. Чтобы ограничить пассивность ответа MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Compute input/output gain with the following loops open
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно открыть обратную связь в целях оценки этой настраивающей цели. Настраивающаяся цель оценена против настройки разомкнутого контура, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Например, чтобы оценить настраивающуюся цель с открытием в местоположении под названием 'x', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'x'.
Совет
Подсвечивать любой выбранный сигнал в Simulink® модель, щелкнуть![]() . Чтобы удалить сигнал из списка вводов или выводов, щелкнуть
. Чтобы удалить сигнал из списка вводов или выводов, щелкнуть![]() . Когда вы выбрали несколько сигналов, можно переупорядочить их использование
. Когда вы выбрали несколько сигналов, можно переупорядочить их использование![]() и
и![]() . Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
. Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
Задайте дополнительные характеристики конической цели сектора, использующей этот раздел диалогового окна.
Conic Sector Matrix
Введите геометрию сектора Q в виде:
Матрица A, для постоянной геометрии сектора. Q симметричная квадратная матрица, которая является ny на стороне, где ny количество выходных сигналов, которые вы задаете для цели. Матричный Q должно быть неопределенным, чтобы описать четко определенный конический сектор. Неопределенная матрица имеет и положительные и отрицательные собственные значения. В частности, Q должен иметь столько же отрицательных собственных значений, сколько существуют входные сигналы, заданные для настраивающейся цели (размер векторного входного сигнала u (t)).
Модель LTI, для зависимой частотой геометрии сектора. Q удовлетворяет Q (s)’ = Q (–s). Другими словами, Q (s) оценивает к Эрмитовой матрице на каждой частоте.
Для получения дополнительной информации займитесь Границами Сектора и индексами Сектора.
Regularization
Параметр регуляризации в виде действительного неотрицательного скалярного значения. Регуляризация сохраняет оценку настраивающейся цели численно послушной, когда другие настраивающие цели имеют тенденцию делать сектор связанным плохо обусловленный на некоторых частотах. Когда это условие произойдет, установите Regularization на маленькое (но не незначительные) часть типичной нормы проходного термина в H. Например, если вы ожидаете норму проходного термина H, чтобы быть порядка 1 во время настройки, попробуйте установку Regularization к 0,001.
Для получения дополнительной информации об условиях, которые требуют регуляризации, смотрите Regularization свойство TuningGoal.ConicSector.
Enforce goal in frequency range
Ограничьте осуществление настраивающейся цели к конкретному диапазону частот. Задайте диапазон частот как вектор-строку из формы [min,max], описанный в единицах частоты вашей модели. Например, чтобы создать настраивающуюся цель, которая применяется только между 1 и 100 рад/с, введите [1,100]. По умолчанию настраивающаяся цель применяется на всех частотах в течение непрерывного времени, и до частоты Найквиста в течение дискретного времени.
Apply goal to
Используйте эту опцию при настройке многоуровневых моделей целиком, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные настраивающие цели осуществляются для всех моделей. Чтобы осуществить настраивающееся требование для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых осуществляется цель. Например, предположите, что вы хотите применить настраивающуюся цель к вторым, третьим, и четвертым моделям в массиве моделей. Чтобы ограничить осуществление требования, введите 2:4 в текстовом поле Only Models.
Для получения дополнительной информации о настройке для многоуровневых моделей, смотрите Устойчивые Настраивающие Подходы (Robust Control Toolbox).
Рассмотрите следующую систему управления.
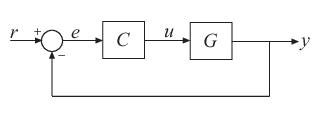
Предположим, что u сигнала отмечен как аналитическая точка в модели, которую вы настраиваете. Предположим также, что G является передаточной функцией с обратной связью от u до y. Распространенное приложение должно создать настраивающуюся цель, которая ограничивает все траектории ввода-вывода {u (t), y (t)} G удовлетворять:
для всего T ≥ 0. Ограничение траекторий ввода-вывода G эквивалентно ограничению выходных траекторий z (t) системы H = [G; I] к сектору, заданному:
(Займитесь Границами Сектора и индексами Сектора для получения дополнительной информации об этой эквивалентности.), Чтобы задать ограничение этого типа с помощью Конической Цели Сектора, задайте u как входной сигнал и задайте y и u как выходные сигналы. Когда вы задаете u как оба ввода и вывода, Коническая Цель Сектора устанавливает соответствующую передаточную функцию на идентичность. Поэтому передаточной функцией, которую ограничивает цель, является H = [G; I], как предназначено. Эта обработка характерна для Конической Цели Сектора. Для других настраивающих целей, когда тот же сигнал появляется в обоих вводах и выводах, получившаяся передаточная функция является нулем в отсутствие обратной связи или дополнительной чувствительностью в том местоположении в противном случае. Этот результат происходит, потому что, когда анализ программных процессов указывает, это принимает, что вход введен после выхода. Смотрите представляющего интерес Марка Сигнэлса для Анализа и проектирования Системы управления для получения дополнительной информации о том, как работают аналитические точки.
Пусть
будьте неопределенной факторизацией Q, где . Если квадратная и минимальная фаза, затем связанный сектор временного интервала
эквивалентно условию сектора частотного диапазона,
для всех частот. Коническая Цель Сектора использует эту эквивалентность, чтобы преобразовать характеристику временного интервала в условие частотного диапазона, которое Control System Tuner может обработать таким же образом, это обрабатывает ограничения усиления. Чтобы защитить эту эквивалентность, Коническая Цель Сектора также делает минимальная фаза путем создания всех ее нулей устойчивыми. Нулями передачи, затронутыми этим условием минимальной фазы, является stabilized dynamics для этой настраивающей цели. Minimum decay rate и Maximum natural frequency, настраивающий опции, управляют нижними и верхними границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, на вкладке Tuning, использует Tuning Options, чтобы изменить значения по умолчанию.
Для границ сектора R - индекс играет ту же роль, как пиковое усиление делает для ограничений усиления (займитесь Границами Сектора и индексами Сектора). Условие
удовлетворен на всех частотах, если и только если R - индекс меньше того. График, что отображения Control System Tuner для Конической Цели Сектора показывают R - значение индекса в зависимости от частоты (см. sectorplot).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую настраивающую цель в нормированное скалярное значение f (x), где x является вектором из свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для Конической Цели Сектора, для передаточной функции с обратной связью H(s,x) от заданных входных параметров до заданных выходных параметров f (x) дают:
R является относительным индексом сектора (см. getSectorIndex) из H(s,x), для сектора, представленного Q.
