Модель контура маршрута, имеющая форму клотоиды
clothoidLaneBoundary объект содержит информацию о модели контура маршрута, имеющей форму клотоиды. clothoid является типом кривой, чья скорость изменения искривления варьируется линейно с расстоянием.
bdry = clothoidLaneBoundarybdry со значениями свойств по умолчанию.
bdry = clothoidLaneBoundary(Name,Value)clothoidLaneBoundary('BoundaryType','Solid') создает модель контура маршрута клотоиды с твердыми контурами маршрута. Заключите каждое имя свойства в кавычки.
Curvature — Искривление контура маршрутаИскривление контура маршрута в виде действительного скаляра. Это свойство представляет скорость изменения направления контура маршрута относительно расстояния. Модули в градусах на метр.
Пример: -1.0
Типы данных: single | double
CurvatureDerivative — Производная искривления контура маршрутаПроизводная искривления контура маршрута в виде действительного скаляра. Это свойство представляет скорость изменения искривления маршрута относительно расстояния. Модули в градусах на метр, в квадрате.
Пример: -0.01
Типы данных: single | double
CurveLength — Длина контура маршрута вдоль дорогиДлина контура маршрута вдоль дороги в виде неотрицательного действительного скаляра. Величины в метрах.
Пример: 25
Типы данных: single | double
HeadingAngle — Первоначальный заголовок контура маршрутаНачальный контур маршрута, направляющийся в виде действительного скаляра. Угол рыскания контура маршрута относительно заголовка автомобиля, оборудованного датчиком. Модули в градусах.
Пример: 10
Типы данных: single | double
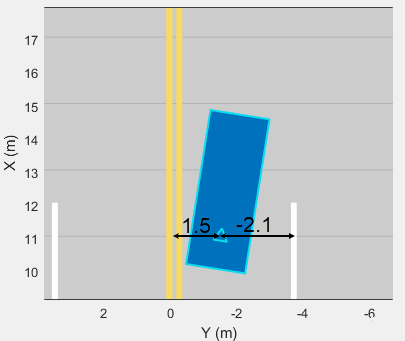
LateralOffset — Боковое смещение положения автомобиля, оборудованного датчиком от контура маршрутаБоковое смещение положения автомобиля, оборудованного датчиком от контура маршрута в виде действительного скаляра. Смещение к контуру маршрута слева от автомобиля, оборудованного датчиком положительно. Смещение справа от автомобиля, оборудованного датчиком отрицательно. Величины в метрах. В этом изображении автомобиль, оборудованный датчиком возмещен в 1,5 метрах от левого маршрута и в 2,1 метрах от правильного маршрута.
Пример: -1.2
Типы данных: single | double
BoundaryType — Тип маркировки контура маршрута'Unmarked' (значение по умолчанию) | 'Solid' | 'Dashed' | 'DoubleSolid' | 'DoubleDashed' | 'SolidDashed' | 'DashedSolid'Тип контура маршрута, отмечающего в виде одного из этих значений.
'Unmarked' | 'Solid' | 'Dashed' | 'DoubleSolid' | 'DoubleDashed' | 'SolidDashed' | 'DashedSolid' |
|---|---|---|---|---|---|---|
Никакая маркировка маршрута | Сплошная линия | Пунктирная линия | Две сплошных линии | Две пунктирных линии | Сплошная линия на левой, пунктирной линии на праве | Пунктирная линия на левой, сплошной линии на праве |
|
|
|
|
|
|
|
|
Strength — Видимость маркировки контура маршрутаВидимость маркировки маршрута в виде действительного скаляра в области значений [0, 1]. Значение 0 соответствует маркировке, которая не отображается. Значение 1 соответствует маркировке, которая полностью отображается. Для двойной маркировки маршрута та же сила используется для обеих линий.
Пример: 0.9
Типы данных: single | double
XExtent — Степень контура маршрута, отмечающего вдоль X - ось[0 Inf] (значение по умолчанию) | вектор с действительным знаком из формы [min X
X макс.]Степень контура маршрута, отмечающего вдоль X - ось в виде вектора с действительным знаком из формы [min X X макс.]. Величины в метрах. X - ось запускается вертикально и положительна в прямом направлении автомобиля, оборудованного датчиком.
Пример: [0 100]
Типы данных: single | double
Width — Ширина маркировки контура маршрутаШирина контура маршрута, отмечающего в виде неотрицательного действительного скаляра. Для двойной маркировки маршрута это значение применяется к ширине каждой маркировки маршрута и к расстоянию между теми маркировками. Величины в метрах.
Пример: 0.15
Типы данных: single | double
computeBoundaryModel | Вычислите граничные точки маршрута из модели контура маршрута клотоиды |
Создайте кривые клотоиды, чтобы представлять левые и правые контуры маршрута. Затем постройте кривые.
Создайте левый контур.
lb = clothoidLaneBoundary('BoundaryType','Solid', ... 'Strength',1,'Width',0.2,'CurveLength',40, ... 'Curvature',-0.8,'LateralOffset',2,'HeadingAngle',10);
Создайте правильный контур почти с идентичными свойствами.
rb = lb; rb.LateralOffset = -2;
Создайте видимый с большого расстояния график. Затем создайте плоттеры контура маршрута и постройте контуры.
bep = birdsEyePlot('XLimits',[0 50],'YLimits',[-10 10]); lbPlotter = laneBoundaryPlotter(bep,'DisplayName','Left-lane boundary','Color','r'); rbPlotter = laneBoundaryPlotter(bep,'DisplayName','Right-lane boundary','Color','g'); plotLaneBoundary(lbPlotter,lb) plotLaneBoundary(rbPlotter,rb); grid hold on

Постройте координаты выбранных точек вдоль контуров.
x = 0:5:50; yl = computeBoundaryModel(lb,x); yr = computeBoundaryModel(rb,x); plot(x,yl,'ro') plot(x,yr,'go') hold off