Адд-Роуд к ведущему сценарию или дорожной группе
road( добавляет дорога к ведущему сценарию, scenario,roadcenters)scenario. Вы задаете дорожную форму и ориентацию дороги в 2D плоскости при помощи набора дорожных центров, roadcenters, в дискретных точках. Когда вы задаете количество маршрутов на дороге, маршруты пронумерованы относительно дорожных центров. Для получения дополнительной информации смотрите, Чертят Направление Дороги и Нумерацию Маршрутов.
road( добавляет дорога с заданной шириной, scenario,roadcenters,roadwidth)roadwidth.
road( добавляет дорога с заданной шириной и банковским углом, scenario,roadcenters,roadwidth,bankingangle)bankingangle.
road( добавляет дорога с заданными маршрутами, scenario,roadcenters,'Lanes',lspec)lspec.
road( добавляет дорога с заданным банковским углом и маршрутами.scenario,roadcenters,bankingangle,'Lanes',lspec)
road(___,'Heading', добавляет дорога с заданным углом рыскания roadheadings)roadheadings, использование любой из комбинаций входных аргументов от предыдущих синтаксисов.
road(___,'Name', задает имя дороги.name)
rd = road(___)Road возразите, что хранит свойства созданной дороги.
road( добавляет дорожный сегмент к дорожной группе, rg,roadcenters)rg. Используйте дорожную группу, чтобы создать пересечение дорог или пересечение. Вы задаете форму и ориентацию дорожного сегмента в 2D плоскости при помощи набора дорожных центров, roadcenters, в дискретных точках. Когда вы задаете количество маршрутов на дорожном сегменте, маршруты пронумерованы относительно дорожных центров. Для получения дополнительной информации смотрите, Чертят Направление Дороги и Нумерацию Маршрутов.
road( добавляет дорожный сегмент с заданной шириной, rg,roadcenters,roadwidth)roadwidth, дорожной группе.
road( добавляет дорожный сегмент с заданной шириной и банковским углом, rg,roadcenters,roadwidth,bankingangle)bankingangle, дорожной группе.
road( добавляет дорожный сегмент с заданными маршрутами, rg,roadcenters,'Lanes',lspec)lspec, дорожной группе.
road( добавляет дорожный сегмент с заданным банковским углом и маршрутами дорожной группе.rg,roadcenters,bankingangle,'Lanes',lspec)
road(___,'Heading', добавляет дорожный сегмент с заданным углом рыскания roadheadings)roadheadings дорожной группе, с помощью любой из комбинаций входных аргументов от предыдущих синтаксисов.
Создайте ведущий сценарий, содержащий кривую дорогу, две дороги подряд и двух агентов: автомобиль и велосипед. Оба агента проходят дорога в течение 60 секунд.
Создайте ведущий объект сценария.
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
Создайте кривую дорогу с помощью дорожных центральных точек после дуги круга с 800-метровым радиусом. Дуга запускается на уровне 0 °, заканчивается на уровне 90 ° и производится в шаге на 5 °.
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; road(scenario,roadcenters,roadwidth);
Добавьте две дороги подряд с шириной по умолчанию, с помощью дорожных центральных точек в каждом конце.
roadcenters = [700 0 0; 100 0 0]; road(scenario,roadcenters)
ans =
Road with properties:
Name: ""
RoadID: 2
RoadCenters: [2x3 double]
RoadWidth: 6
BankAngle: [2x1 double]
Heading: [2x1 double]
roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters)
ans =
Road with properties:
Name: ""
RoadID: 3
RoadCenters: [2x3 double]
RoadWidth: 6
BankAngle: [2x1 double]
Heading: [2x1 double]
Получите дорожные контуры.
rbdry = roadBoundaries(scenario);
Добавьте автомобиль и велосипед к сценарию. Расположите автомобиль в начале первой дороги подряд.
car = vehicle(scenario,'ClassID',1,'Position',[700 0 0], ... 'Length',3,'Width',2,'Height',1.6);
Расположите велосипед дальше в будущем.
bicycle = actor(scenario,'ClassID',3,'Position',[706 376 0]', ... 'Length',2,'Width',0.45,'Height',1.5);
Постройте сценарий.
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');

Отобразите положения агента и профили.
poses = actorPoses(scenario)
poses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
profiles = actorProfiles(scenario)
profiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
Создайте ведущий сценарий, содержащий дорогу фигуры 8, заданную в мировых координатах сценария. Преобразуйте мировые координаты сценария к системе координат автомобиля, оборудованного датчиком.
Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Добавьте дорогу фигуры 8 к сценарию. Отобразите сценарий.
roadCenters = [0 0 1
20 -20 1
20 20 1
-20 -20 1
-20 20 1
0 0 1];
roadWidth = 3;
bankAngle = [0 15 15 -15 -15 0];
road(scenario,roadCenters,roadWidth,bankAngle);
plot(scenario)
Добавьте автомобиль, оборудованный датчиком в сценарий. Расположите транспортное средство в мировых координатах (20, –20) и ориентируйте его под –15 углами рыскания степени.
ego = actor(scenario,'ClassID',1,'Position',[20 -20 0],'Yaw',-15);

Получите дорожные контуры в координатах автомобиля, оборудованного датчиком при помощи roadBoundaries функция. Задайте автомобиль, оборудованный датчиком как входной параметр.
rbEgo1 = roadBoundaries(ego);
Отобразите результат на видимом с большого расстояния графике.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road'); plotLaneBoundary(lbp,rbEgo1)

Получите дорожные контуры в мировых координатах при помощи roadBoundaries функция. Задайте сценарий как входной параметр.
rbScenario = roadBoundaries(scenario);
Получите дорожные контуры в координатах автомобиля, оборудованного датчиком при помощи driving.scenario.roadBoundariesToEgo функция.
rbEgo2 = driving.scenario.roadBoundariesToEgo(rbScenario,ego);
Отобразите дорожные контуры на видимом с большого расстояния графике.
bep = birdsEyePlot; lbp = laneBoundaryPlotter(bep,'DisplayName','Road boundaries'); plotLaneBoundary(lbp,{rbEgo2})

Создайте ведущий сценарий, содержащий автомобиль и пешехода на прямой дороге. Затем создайте и отобразите маркировки маршрута дороги на видимом с большого расстояния графике.
Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Создайте прямой, 25-метровый дорожный сегмент с двумя маршрутами перемещения в одном направлении.
lm = [laneMarking('Solid') laneMarking('Dashed','Length',2,'Space',4) laneMarking('Solid')]; l = lanespec(2,'Marking',lm); road(scenario,[0 0 0; 25 0 0],'Lanes',l);
Добавьте в ведущий сценарий пешеходный переход дорога на уровне 1 метра в секунду и автомобиль после дороги на уровне 10 метров в секунду.
ped = actor(scenario,'ClassID',4,'Length',0.2,'Width',0.4,'Height',1.7); car = vehicle(scenario,'ClassID',1); smoothTrajectory(ped,[15 -3 0; 15 3 0],1); smoothTrajectory(car,[car.RearOverhang 0 0; 25-car.Length+car.RearOverhang 0 0],10);
Отобразите сценарий и соответствующий график преследования.
plot(scenario)

chasePlot(car)

Запустите симуляцию.
Создайте видимый с большого расстояния график.
Создайте плоттер схемы, плоттер контура маршрута и плоттер маркировки маршрута для видимого с большого расстояния графика.
Получите дорожные контуры и предназначайтесь для основ.
Получите вершины маркировки маршрута и поверхности.
Отобразите контуры маршрута и маркеры маршрута.
Запустите цикл симуляции.
bep = birdsEyePlot('XLim',[-25 25],'YLim',[-10 10]); olPlotter = outlinePlotter(bep); lbPlotter = laneBoundaryPlotter(bep); lmPlotter = laneMarkingPlotter(bep,'DisplayName','Lanes'); legend('off'); while advance(scenario) rb = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); [lmv,lmf] = laneMarkingVertices(car); plotLaneBoundary(lbPlotter,rb); plotLaneMarking(lmPlotter,lmv,lmf); plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color); end



Создайте ведущий сценарий, содержащий две кривых дороги к подключению. Задайте углы рыскания каждого дорожного центра, чтобы подстроить форму дороги в соединяющейся области.
Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Добавьте две дороги к ведущему сценарию путем определения их дорожных центров и дорожных углов рыскания.
% Add the first road roadCenters = [-7 20; 0 0; 30 0; 30 -20; 10 -30]; roadHeadings = [-90; 0; NaN; NaN; -90]; laneMark = laneMarking('Solid'); laneSpecification = lanespec(2,Marking=laneMark); road(scenario,roadCenters,'Lanes',laneSpecification, ... 'Heading',roadHeadings,'Name','Road 1'); %Add the second road roadCenters = [10 -30; 30 -40; 30 -60; 0 -60; -7 -80]; roadHeadings = [-90; NaN; NaN; 180; -90]; laneMark = laneMarking('Dashed'); laneSpecification = lanespec(2,Marking=laneMark); road(scenario,roadCenters,'Lanes',laneSpecification, ... 'Heading',roadHeadings,'Name','Road 2');
Постройте сценарий.
plot(scenario,'RoadCenters','on')

Пересечением с тремя путями является Y-соединение, в котором две соседних дороги пересекают третью дорогу под тупым углом, как показано в этом рисунке. Чтобы соединить эти три дороги, вы создадите Y-соединение путем добавления трех дорожных сегментов.

Добавьте три дороги к управлению сценарием
Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Задайте количество маршрутов и ширину каждого маршрута на дорогах.
ls = lanespec(2,'Width',5);Задайте дорожные центры трех дорог и добавьте их в ведущий сценарий. Первая дорога по диагонали ориентирована слева от холста сценария, вторая дорога по диагонали ориентирована справа от холста сценария, и третья дорога ориентирована вертикально.
% Add the first road roadCenters = [-20 0; 6 0]; road(scenario,roadCenters,'Name','Road 1','Lanes',ls); % Add the second road roadCenters = [23 7; 50 33]; road(scenario,roadCenters,'Name','Road 2','Lanes',ls); % Add the third road roadCenters = [23 -7; 50 -33]; road(scenario,roadCenters,'Name','Road 3','Lanes',ls);
Постройте сценарий.
figure plot(scenario)

Создайте Y-соединение, чтобы соединить дороги
Создайте RoadGroup объект. Задайте ширину для каждого дорожного сегмента, который формирует Y-соединение.
rg = driving.scenario.RoadGroup('Name','Y-Junction'); roadWidth = 10;
Задайте дорожные центры трех дорожных сегментов и добавьте эти дорожные сегменты в RoadGroup объект при помощи road функция. Эти дорожные сегменты пересекаются друг с другом.
% Add the first road segment roadCenters = [23 7; 14 1; 6 0]; road(rg,roadCenters,roadWidth,'Name','Segment 1'); % Add the second road segment roadCenters = [23 -7; 14 -1; 6 0]; road(rg,roadCenters,roadWidth,'Name','Segment 2'); % Add the third road segment roadCenters = [23 7; 21 4; 21 -4; 23 -7]; road(rg,roadCenters,roadWidth,'Name','Segment 3');
Добавьте Y-соединение в управление сценарием
Добавьте дорожные сегменты, сохраненные в RoadGroup возразите против ведущего сценария при помощи roadGroup функция. Дорожные сегменты формируют Y-соединение, которое соединяет эти три дороги в ведущем сценарии.
roadGroup(scenario,rg);

Создайте ведущий сценарий с тремя дорогами и используйте пересечение дорог, чтобы соединить их, как показано в этом рисунке.

Добавьте три дороги к управлению сценарием
Создайте пустой ведущий сценарий.
scenario = drivingScenario;
Задайте количество маршрутов и ширину каждого маршрута на дорогах.
ls = lanespec(2,'Width',5);Задайте дорожные центры трех дорог и добавьте их в ведущий сценарий. Первые и вторые дороги вертикально ориентированы, налево и к центру холста сценария соответственно. Третья дорога горизонтально ориентирована, справа от первых двух дорог и между ними вертикально.
% Add the first road roadCenters = [70 30; 30 30]; road(scenario,roadCenters,'Name','Road 1','Lanes',ls); % Add the second road roadCenters = [0 0; -40 0]; road(scenario,roadCenters,'Name','Road 2','Lanes',ls); % Add the third road roadCenters = [15 -20; 15 -60]; road(scenario,roadCenters,'Name','Road 3','Lanes',ls);
Постройте сценарий.
plot(scenario)

Создайте соединение, чтобы соединить дороги
Создайте RoadGroup объект. Задайте ширину каждого дорожного сегмента, который формирует соединение.
rg = driving.scenario.RoadGroup('Name','Junction'); roadWidth = 10;
Задайте дорожные центры двух дорожных сегментов и задайте углы рыскания для первого дорожного сегмента. Добавьте эти дорожные сегменты в RoadGroup объект при помощи road функция. Эти дорожные сегменты пересекают друг друга.
%Add the first road segment and specify its heading angles roadCenters = [31 30; 15 20; 15 -21]; roadHeadings = [180; -90; -90]; road(rg,roadCenters,roadWidth, ... 'Name','Segment 1','Heading',roadHeadings); % Add the second road segment roadCenters = [15 0; -1 0]; road(rg,roadCenters,roadWidth, ... 'Name','Segment 2');
Добавьте соединение в управление сценарием
Добавьте дорожные сегменты, сохраненные в RoadGroup возразите против ведущего сценария при помощи roadGroup функция. Дорожные сегменты формируют соединение, которое соединяет эти три дороги в ведущем сценарии.
roadGroup(scenario,rg);

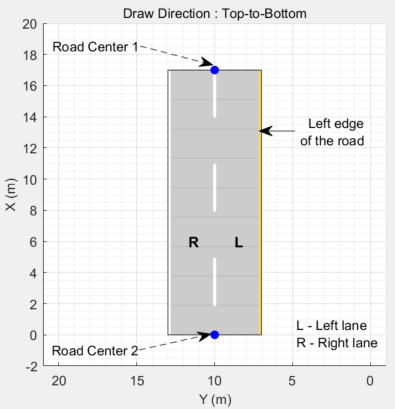
Создать дорогу при помощи road функционируйте, задайте дорожные центры как матричный вход. Функция создает направленную линию, которая пересекает дорожные центры, начинающие с координат в первой строке матрицы и заканчивающиеся в координатах в последней строке матрицы. Координаты в первых двух строках матрицы задают draw direction дороги. Эти координаты соответствуют первым двум последовательным дорожным центрам. Направление ничьей является направлением, в котором дороги представляют в графике сценария.
Чтобы создать дорогу при помощи приложения Driving Scenario Designer, можно или задать параметр Road Centers или в интерактивном режиме привлечь Scenario Canvas. Для подробного примера смотрите, Создают Ведущий Сценарий. В этом случае направление ничьей является направлением, в котором дороги представляют в Scenario Canvas.
Для дороги с направлением ничьей от начала до конца различие между x - координаты первых двух последовательных дорожных центров положительно.
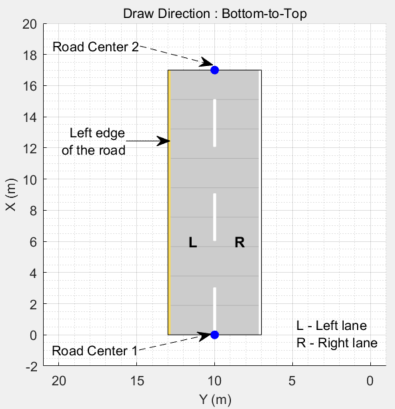
Поскольку дорога с нижней частью к верхней части чертит направление, различие между x - координаты первых двух последовательных дорожных центров отрицательны.
|
|
|
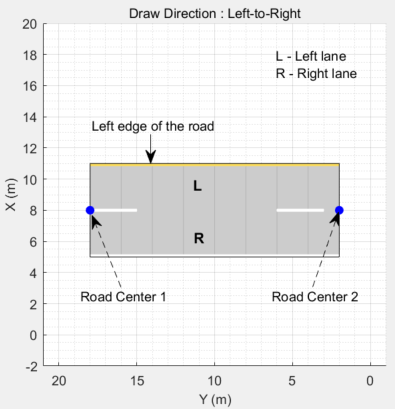
Для дороги со слева направо чертят направление, различие между y - координаты первых двух последовательных дорожных центров положительны.
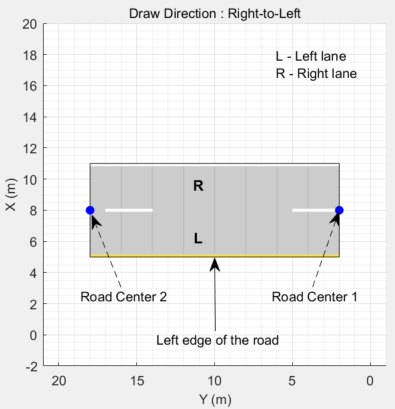
Для дороги со справа налево чертят направление, различие между y - координаты первых двух последовательных дорожных центров отрицательны.
|
|
|
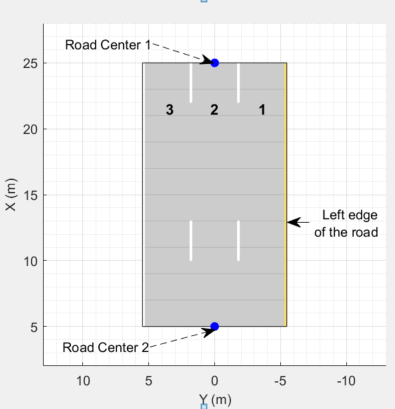
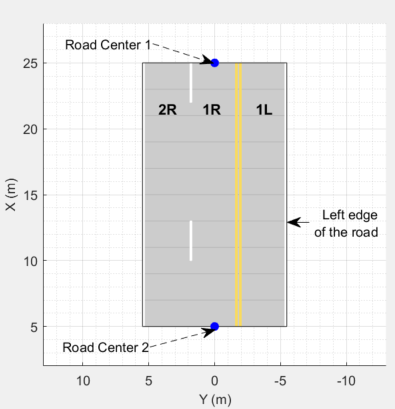
Маршруты должны быть пронумерованы слева направо с левым краем дороги, заданной относительно направления ничьей дороги. Для односторонней дороги, по умолчанию, левый край дороги является чисто желтой маркировкой, которая указывает на конец дороги в поперечном направлении (перпендикуляр направления, чтобы чертить направление). Для двухсторонней дороги, по умолчанию, оба ребра отмечены чистыми белыми линиями.
Например, эти схемы показывают, как маршруты пронумерованы на односторонней и двухсторонней дороге с направлением ничьей сверху донизу.
| Нумерация маршрутов на Он-Вей-Роуд | Нумерация маршрутов на Туо-Вей-Роуд |
Задайте количество маршрутов как положительное целое число для односторонней дороги. Если вы устанавливаете целочисленное значение как 1, 2, 3 обозначает первые, вторые, и третьи маршруты дороги, соответственно.
| Задайте количество маршрутов как двухэлементный вектор из положительного целого числа для двухсторонней дороги. Если вы устанавливаете вектор как [ 1L обозначает единственный левый маршрут дороги. 1R и 2R обозначают первые и вторые правильные маршруты дороги, соответственно.
|
Технические требования маршрута применяются согласно порядку, в котором пронумерованы маршруты.
Угол рыскания относится к углу дороги в данную дорожную центральную точку, направляющуюся к следующему дорожному центру, измеренному против часовой стрелки относительно x - ось в области значений [–180, 180] степени.
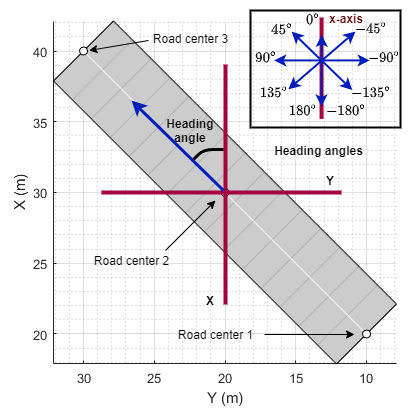
При определении углов рыскания, когда ограничение к дорожным центральным точкам включает точное управление формой и ориентацию дорог.
Например, создайте дорогу путем определения ее дорожных центров. Постройте дорогу
scenario = drivingScenario; roadCenters = [0 35; 0 18; 15 10; 32 3; 32 -12]; roadHeadings = [NaN; NaN; 0; NaN; NaN]; road(scenario,roadCenters,'Heading',roadHeadings); plot(scenario,'Centerline','on','RoadCenters','on')
Этот рисунок показывает дорогу с одним ограниченным дорожным углом рыскания и его соответствующим дорожным центром, заданным в этом примере. Другие дорожные центры неограничены, и их углы рыскания определяются автоматически road функция.
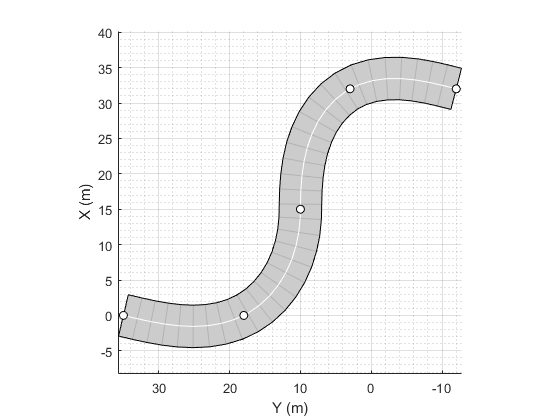
Теперь задайте углы рыскания для каждой из дорожных центральных точек на дороге. Постройте новую дорогу.
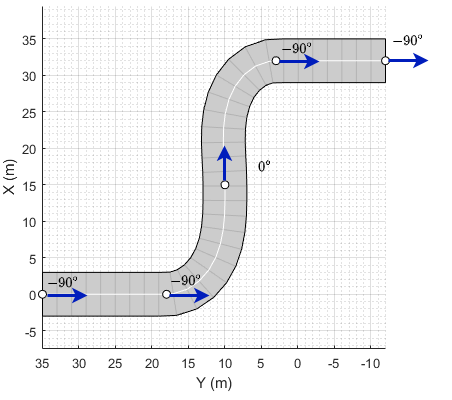
scenario = drivingScenario; roadCenters = [0 35; 0 18; 15 10; 32 3; 32 -12]; roadHeadings = [-90; -90; 0; -90; -90]; road(scenario,roadCenters,'Heading',roadHeadings); plot(scenario,'Centerline','on','RoadCenters','on')
Этот рисунок показывает дорогу с дорожными углами рыскания и их соответствующими дорожными центрами, заданными в примере.
road функция создает дорогу для агента, чтобы следовать в ведущем сценарии. Вы задаете дорогу с помощью N двумерный или 3D waypoints. Каждый из сегментов N - 1 между waypoints задает кривую, искривление которой варьируется линейно с расстоянием вдоль сегмента. Функция соответствует кусочной кривой clothoid к (x, y) координаты waypoints путем соответствия с искривлением с обеих сторон waypoint. Для незакрытой кривой искривление в первом и последнем waypoint является нулем. Если первые и последние waypoints совпадают, то искривления до и после конечных точек являются соответствующими. z - координаты дороги интерполированы с помощью сохраняющей форму кусочной кубической кривой.