Fusion от дорожки к дорожке
Sensor Fusion and Tracking Toolbox / Алгоритмы Отслеживания Мультиобъекта
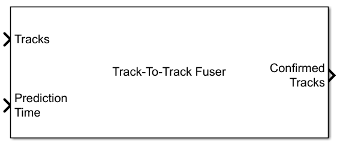
Simulink Track-to-Track Fuser® блок является мультиисточником, мультиобъектом, термофиксатор уровня дорожки, который использует ассоциацию глобальных самых близких соседей (GNN), чтобы обеспечить одну гипотезу о дорожках, которые это плавит. Входные параметры с блоком являются дорожками из источников, которые уже отслеживают несколько объектов, как мультиобъектные блоки средства отслеживания или другие блоки термофиксатора от дорожки к дорожке. Входные дорожки называются source или local tracks, тогда как дорожки, обеспеченные в термофиксаторе, называются central tracks.
Tracks — Отследите списокОтследите список в виде шины Simulink, содержащей структуру MATLAB. Структура имеет форму:
| Поле | Описание |
|---|---|
NumTracks | Количество дорожек |
Tracks | Массив структур дорожки |
Поля структуры дорожки показывают в Структуре Дорожки.
Prediction Time — Отследите время обновленияОтследите время обновления в виде действительного скаляра в секундах. Термофиксатор обновляет все дорожки к этому времени. Время обновления должно увеличиться с каждым вызовом блока. Время обновления должно быть, по крайней мере, столь же большим как самый большой UpdateTime заданный во входном порту Tracks.
Если этот порт не включен, часы симуляции, управляемые Simulink, определяют время обновления.
Чтобы включить этот порт, на вкладке Port Setting, устанавливают Prediction time source на Input port.
Source Configurations — Исходный список настроекИсходная настройка перечисляет в виде шины Simulink, содержащей структуру MATLAB. Структура имеет форму:
| Поле | Описание |
|---|---|
NumConfigurations | Количество исходных настроек не по умолчанию. Значение поля должно быть меньше значения, заданного в параметре Maximum number of source configurations. |
Configurations | Массив исходных конфигурационных структур. |
Поля исходной конфигурационной структуры:
| Имя поля | Описание |
|---|---|
SourceIndex | Уникальный индекс для исходной системы в виде положительного целого числа. |
IsInternalSource | Укажите, является ли источник внутренним к термофиксатору в виде true или false. Внутренний источник является источником, что термофиксатор непосредственно плавит дорожки от того, даже если дорожки не сам, сообщил. Например, если термофиксатор на уровне транспортного средства, радар отслеживания, установленный на связанном транспортном средстве, рассматривается внутренним, в то время как другое транспортное средство, которое сообщает о сплавленных дорожках, рассматривается внешним. |
IsInitializingCentralTracks | Укажите, может ли источник инициализировать центральную дорожку в термофиксаторе в виде true или false. Центральная дорожка является дорожкой, обеспеченной в термофиксаторе. |
LocalToCentralTransformFcn | Функция, чтобы преобразовать дорожку от локального до центрального пространства состояний в виде строки или вектора символов, содержащего имя функции преобразования. |
CentralToLocalTransformFcn | Функция, чтобы преобразовать дорожку от центрального до локального пространства состояний в виде строки или вектора символов, содержащего имя функции преобразования. |
Чтобы включить этот порт, на вкладке Fuser Management, выбирают параметр Update source configurations with time.
State Parameters — Отследите параметры состоянияОтследите параметры состояния в виде шины Simulink, содержащей структуру MATLAB. Структура имеет форму:
| Поле | Описание |
|---|---|
NumParameters | Количество параметров состояния не по умолчанию в виде неотрицательного целого числа |
Parameters | Массив структур параметра состояния |
Блок использует значение Parameters поле для StateParameters поле сгенерированных дорожек. Можно использовать эти параметры, чтобы задать систему координат, в которой о дорожке сообщают или другие желательные атрибуты сгенерированных дорожек.
Например, можно использовать следующую структуру, чтобы задать прямоугольную систему координат, положение источника которой в [10 10 0] метры и чьей скоростью источника является [2 -2 0] метры в секунду относительно системы координат сценария.
| Имя поля | Значение |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Чтобы включить этот порт, во вкладке Tracker Configuration, выбирают параметр Update track state parameters with time.
Confirmed Tracks — Подтвержденные дорожкиПодтвержденные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Структура имеет форму:
| Поле | Описание |
|---|---|
NumTracks | Количество дорожек. |
Tracks | Массив структур дорожки длины установлен параметром Maximum number of central tracks. Только первый NumTracks из них фактические дорожки. |
Поля структуры дорожки показывают в Структуре Дорожки.
Дорожка подтверждена, если она удовлетворяет порогу, заданному в the Confirmation threshold параметре на вкладке Tracks.
Tentative Tracks — Предварительные дорожкиПредварительные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Дорожка является предварительной, прежде чем она будет подтверждена.
Структура имеет форму:
| Поле | Описание |
|---|---|
NumTracks | Количество дорожек. |
Tracks | Массив структур дорожки длины установлен параметром Maximum number of central tracks. Только первый NumTracks из них фактические дорожки. |
Поля структуры дорожки показывают в Структуре Дорожки.
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable tentative tracks output.
All Tracks — Подтвержденные и предварительные дорожкиОбъединенный список подтвержденных и предварительных дорожек, возвращенных как шина Simulink, содержащая структуру MATLAB.
Структура имеет форму:
| Поле | Описание |
|---|---|
NumTracks | Количество дорожек. |
Tracks | Массив структур дорожки длины установлен параметром Maximum number of central tracks. Только первый NumTracks из них фактические дорожки. |
Поля структуры дорожки показывают в Структуре Дорожки.
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable all tracks output.
Info — Дополнительная информация для анализа обновлений дорожкиДополнительная информация для анализа обновлений дорожки, возвращенных как шина Simulink, содержащая структуру MATLAB.
Эта таблица показывает поля информационной структуры:
| Поле | Описание |
BranchIDsAtStepBeginning | Идентификаторы ветви, когда обновление началось. |
CostMatrix | Стоимость матрицы присвоения. |
Assignments | Присвоения, возвращенные из |
UnassignedTracks | Идентификаторы неприсвоенных ветвей возвращены в средство отслеживания. |
UnassignedDetections | Идентификаторы неприсвоенных обнаружений возвращены в средство отслеживания. |
InitialBranchHistory | История ветви после ответвления и перед сокращением. |
InitialBranchScores | Баллы ветви перед сокращением. |
KeptBranchHistory | История ветви после начального сокращения. |
KeptBranchScores | Баллы ветви после начального сокращения. |
Clusters | Отображение логического массива переходит к кластерам. Ветви принадлежат того же кластера, если они совместно используют обнаружения в своей истории или принадлежат той же дорожке или непосредственно или посредством других ветвей. |
TrackIncompatibility | Матрица несовместимости ветви. |
GlobalHypotheses | Логическое матричное отображение переходит к глобальным гипотезам. Совместимые ветви могут принадлежать тех же гипотез. |
GlobalHypScores | Общий счет глобальных гипотез. |
PrunedBranches | Логический массив ветвей, что |
GlobalBranchProbabilities | Глобальная вероятность каждой ветви, существующей в глобальных гипотезах. |
BranchesDeletedByPruning | Ветви удалены средством отслеживания. |
BranchIDsAtStepEnd | Идентификаторы ветви, когда законченное обновление. |
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable information output.
Fuser Index — Уникальный индекс для термофиксатора дорожкиУникальный индекс для термофиксатора в виде положительного целого числа. Используйте это свойство отличить различные термофиксаторы в среде нескольких-термофиксаторов.
Пример 2
Assignment algorithm name — Алгоритм присвоенияMatchPairs (значение по умолчанию) | Munkres | Jonker-Volgenant | Auction | CustomАлгоритм присвоения в виде MatchPairs, Munkres, Jonker-Volgenant, Auction, или Custom. Munkres является единственным алгоритмом присвоения, который гарантирует оптимальное решение, но это является также самым медленным, особенно для больших количеств обнаружений и дорожек. Другие алгоритмы не гарантируют оптимального решения, но могут быть быстрее для проблем с 20 или больше дорожками и обнаружениями. Используйте Custom чтобы задать ваше собственное присвоение функционируют и задают его имя в параметре Name of 'Custom' assignment function.
Типы данных: char
Name of 'Custom' assignment function — Имя 'Пользовательской' функции присвоенияИмя 'Пользовательского' присвоения функционирует в виде имени функции. Функция присвоения должна иметь следующий синтаксис:
[assignments,unassignedCentral,unassignedLocal] = myfun(cost,costNonAssignment)
assignmunkres.
Пример: myfun
Чтобы включить это свойство, установите параметр Assignment algorithm name на Custom.
Threshold for assigning source to central tracks — Порог для присвоения источника к центральным дорожкам[1 Inf]*30.0 (значение по умолчанию) | положительная скалярная величина | вектор 1 на 2 положительных значенийПорог для присвоения источника к центральным дорожкам в виде положительной скалярной величины или вектора 1 на 2 формы [C 1
C 2], где C 1 ≤ C 2. Если задано как скаляр, заданное значение, val, расширено до [val
Inf].
Первоначально, термофиксатор выполняет крупную оценку для нормированного расстояния между всем источником и центральными дорожками. Термофиксатор только вычисляет точное нормированное расстояние для источника и центральных комбинаций, крупное нормированное расстояние которых меньше C 2. Кроме того, термофиксатор может только присвоить локальную дорожку центральной дорожке, если их точное нормированное расстояние меньше C 1. Смотрите distance функция используется с отслеживанием фильтров для объяснения расчета расстояния.
Совет
Увеличьте значение C 2, если существуют комбинации источника и центральных дорожек, которые должны быть вычислены для присвоения, но не являются. Уменьшите его, если вычисление занимает слишком много времени.
Увеличьте значение C 1, если существуют исходные дорожки, которые должны быть присвоены центральным дорожкам, но не являются. Уменьшите его, если существуют локальные дорожки, которые присвоены центральным дорожкам, которым они не должны быть присвоены (слишком далеко).
Maximum number of central tracks — Максимальное количество центральных дорожекМаксимальное количество центральных дорожек, которые средство отслеживания может обеспечить в виде положительного целого числа.
Maximum number of source configurations — Максимальное количество исходных настроекМаксимальное количество исходных настроек, которые термофиксатор может обеспечить в виде положительного целого числа.
Source configurations — Настройка исходных системstruct('SourceIndex',1) (значение по умолчанию) | массив исходных конфигурационных структурНастройка исходных систем в виде массива исходных конфигурационных структур. Поля исходной конфигурационной структуры:
| Имя поля | Описание |
|---|---|
SourceIndex | Уникальный индекс для исходной системы в виде положительного целого числа. |
IsInternalSource | Укажите, является ли источник внутренним к термофиксатору в виде true или false. Внутренний источник является источником, что термофиксатор непосредственно плавит дорожки от того, даже если дорожки не сам, сообщил. Например, если термофиксатор на уровне транспортного средства, радар отслеживания, установленный на связанном транспортном средстве, рассматривается внутренним, в то время как другое транспортное средство, которое сообщает о сплавленных дорожках, рассматривается внешним. |
IsInitializingCentralTracks | Укажите, может ли источник инициализировать центральную дорожку в термофиксаторе в виде true или false. Центральная дорожка является дорожкой, обеспеченной в термофиксаторе. |
LocalToCentralTransformFcn | Функция, чтобы преобразовать дорожку от локального до центрального пространства состояний в виде строки или вектора символов, содержащего имя функции преобразования. |
CentralToLocalTransformFcn | Функция, чтобы преобразовать дорожку от центрального до локального пространства состояний в виде строки или вектора символов, содержащего имя функции преобразования. |
Update source configurations with time — Обновите исходные настройки со временемoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить вход исходных настроек через входной порт Source configurations.
Track state parameters — Параметры дорожки утверждают систему координатЗадайте параметры системы координат состояния дорожки как структура или массив структур. Блок передает значение этого параметра к StateParameters поле сгенерированных дорожек. Можно использовать эти параметры, чтобы задать систему координат, в которой о дорожке сообщают или другие желательные атрибуты сгенерированных дорожек.
Например, можно использовать следующую структуру, чтобы задать прямоугольную систему координат, положение источника которой в [10 10 0] метры и чьей скоростью источника является [2 -2 0] метры в секунду относительно системы координат сценария.
| Имя поля | Значение |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Можно обновить параметры состояния дорожки через входной порт State Parameters путем выбора параметра Update track state parameters with time.
Типы данных: struct
Update track state parameters with time — Обновите параметры состояния дорожки со временемoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить входной порт для параметров состояния дорожки через входной порт State Parameters.
Simulate using — Тип симуляции, чтобы запуститьсяInterpreted execution (значение по умолчанию) | Code GenerationВыберите тип симуляции из этих опций:
Interpreted execution — Симулируйте модель с помощью интерпретатора MATLAB. Эта опция сокращает время запуска. В Interpreted execution режим, можно отладить исходный код блока.
Code generation — Симулируйте модель с помощью сгенерированного кода C. В первый раз, когда вы запускаете симуляцию, Simulink генерирует код С для блока. Код С снова используется для последующих симуляций, пока модель не изменяется. Эта опция требует дополнительного времени запуска.
Confirmation threshold [M N] — Порог для центрального подтверждения дорожкиПорог для центрального подтверждения дорожки в виде положительного целого числа, M или вектора 1 на 2 с действительным знаком положительных целых чисел, [M N]. Центральная дорожка подтверждена, если она присвоена локальным дорожкам, по крайней мере, времена M в последних обновлениях N. Если задано как положительное целое число, M, порог подтверждения расширен до [M M].
Deletion threshold [P Q] — Порог для центрального удаления дорожкиПорог для центрального удаления дорожки в виде положительного целого числа, P или вектора 1 на 2 положительных целых чисел [P Q] с P ≤ Q. Центральная дорожка удалена, если дорожка не присвоена локальным дорожкам, по крайней мере, времена P в последних обновлениях Q. Если задано положительный целочисленный P, порог подтверждения расширен до [P P].
Central track state size — Центральный размер состояния дорожкиЦентральный размер состояния дорожки в виде положительного целого числа.
Central track object attributes — Центральные атрибуты отслеживаемого объектаstruct (значение по умолчанию) | структураЦентральный отслеживаемый объект приписывает в виде структуры. Средство отслеживания передает значение этого параметра к ObjectAttributes поле дорожки выводится.
State transition function — Функция изменения состоянияconstvel (значение по умолчанию) | имя функцииФункция изменения состояния в виде имени функции. Эта функция вычисляет состояние на временном шаге k на основе состояния на временном шаге k –1.
Если параметр Enable additive process noise на вкладке Tracks включен, функция должна использовать следующий синтаксис:
x(k) = f(x(k-1),dt)
x(k) — Предполагаемое состояние во время kВ виде вектора или матрицы. Если задано как матрица, то каждый столбец матрицы представляет один вектор состояния.
dt — Временной шаг для предсказания.
Если параметр Enable additive process noise на вкладке Tracks не включен, функция должна использовать этот синтаксис:
x(k) = f(x(k-1),w(k-1),dt)
x(k) — Предполагаемое состояние во время kВ виде вектора или матрицы. Если задано как матрица, то каждый столбец матрицы представляет один вектор состояния.
w(k) — Шум процесса во время k.
dt — Временной шаг для предсказания.
Пример: @constacc
State transition Jacobian function — Функция Якоби изменения состоянияЯкобиан изменения состояния функционирует в виде имени функции. Если не заданный, якобиан численно вычисляется, который может увеличить время вычислений и числовую погрешность. Если задано, функция должна поддержать один из этих двух синтаксисов:
Если параметр Enable additive process noise на вкладке Tracks включен, функция должна использовать этот синтаксис:
Jx(k) = statejacobianfcn(x(k),dt)
x(k) — Предполагаемое состояние во время kВ виде M-by-1 вектор из вещественных значений.
dt — Временной шаг для предсказания.
Jx(k) — Якобиан изменения состояния функционирует относительно состояния, df/dx, оцененный в x(k). Якобиан возвращен как M-by-M матрица.
Если параметр Enable additive process noise на вкладке Tracks не включен, функция должна использовать этот синтаксис::
[Jx(k),Jw(k)] = statejacobianfcn(x(k),w(k),dt)
x(k) — (Предполагаемое) состояние во время kВ виде M-by-1 вектор из вещественных значений.
w(k) — Шум процесса во время kВ виде W-by-1 вектор из вещественных значений.
dt — Временной шаг для предсказания.
Jx(k) — Якобиан изменения состояния функционирует относительно состояния, df/dx, оцененный в x(k). Якобиан возвращен как M-by-M матрица.
Jw(k) — Якобиан изменения состояния функционирует относительно шума процесса, df/dw, оцененный в x(k) и w(k). Якобиан возвращен как M-by-W матрица.
Пример: @constaccjac
Process noise matrix — Матрица шума процессаeye(3) (значение по умолчанию) | положительный действительный скаляр | положительная определенная матрицаКовариационная матрица шума процесса в виде положительного действительного скаляра или положительной определенной матрицы.
Когда параметр Enable additive process noise на вкладке Tracks будет включен, задайте ковариацию шума процесса как положительный действительный скаляр или положительный определенный M-by-M матрица. M является размерностью вектора состояния. Когда задано как скаляр, матрицей является M-by-M диагональная матрица с каждым диагональным элементом, равным скаляру.
Когда параметр Enable additive process noise на вкладке Tracks не будет включен, задайте ковариацию шума процесса как W-by-W матрица. W является размерностью вектора шума процесса.
Пример: [1.0 0.05; 0.05 2]
Enable additive process noise — Включите шум аддитивного процессаoff (значение по умолчанию) | onВключите шум аддитивного процесса в виде on или off. Когда это - on, шум процесса добавляется к вектору состояния. В противном случае шум включен в функцию изменения состояния.
State fusion function — Функция сплава состоянияCross (значение по умолчанию) | Intersection | CustomФункция сплава состояния в виде одной из тех опций:
Cross — Использует алгоритм сплава перекрестной ковариации
Intersection — Использует перекрестный алгоритм сплава ковариации
Custom — Позволяет вам задать индивидуально настраиваемую функцию сплава использование параметра Name of 'Custom' fusion function
Используйте параметр State fusion parameters source, чтобы задать дополнительные параметры, используемые алгоритмом сплава состояния.
Name of 'Custom' fusion function — Имя пользовательской функции присвоенияИмя пользовательского присвоения функционирует в виде имени строки или имени функции.
Функция сплава состояния должна поддержать один из следующих синтаксисов:
[fusedState,fusedCov] = f(trackState,trackCov) [fusedState,fusedCov] = f(trackState,trackCov,fuseParams)
trackState задан как N-by-M матрица. N является размерностью состояния дорожки, и M является количеством дорожек.
trackCov задан как N-by-N-by-M матрица. N является размерностью состояния дорожки, и M является количеством дорожек.
fuseParams дополнительные параметры, заданные в параметре State fusion parameters source.
fusedState возвращен как N-by-1 вектор.
fusedCov возвращен как N-by-N матрица.
Чтобы включить это свойство, установите параметр State fusion function на Custom.
State fusion parameters source — Источник параметров сплава состоянияAuto (значение по умолчанию) | PropertyИсточник параметров сплава состояния в виде одной из этих опций:
Auto — Блок использует параметры сплава значения по умолчанию для каждого, насыщают алгоритм сплава. Смотрите Cross covariance factor, Optimize covariance based on и State fusion custom algorithm parameters для получения дополнительной информации.
Property — Установите использование параметров сплава состояния
Параметр Cross covariance factor, когда State fusion function выбран как Cross.
Параметр Optimize covariance based on, когда State fusion function выбран как Intersection.
Параметр State fusion custom algorithm parameters, когда State fusion function выбран как Custom.
Cross covariance factor — Перекрестный фактор ковариацииПерекрестный фактор ковариации в виде скаляра в области значений (0,1). Смотрите fusexcov для получения дополнительной информации.
Optimize covariance based on — Перекрестные критерии алгоритмаdet (значение по умолчанию) | traceПерекрестные критерии алгоритма в виде det или trace. Смотрите fusecovint для получения дополнительной информации.
State fusion custom algorithm parameters — Сплав состояния пользовательские параметры алгоритмаСплав состояния пользовательские параметры алгоритма, заданные в любом типе переменной, пока, это совпадает с настройкой дополнительного fuseParams вход пользовательской функции сплава состояния, заданной в параметре Name of 'Custom' assignment function.
Fuse only confirmed source tracks — Плавьте только подтвержденные исходные дорожкиon (значение по умолчанию) | offПлавьте только подтвержденные исходные дорожки в виде on или off. Установите этот параметр на off если вы хотите плавить все исходные дорожки независимо от их состояния подтверждения.
Fuse coasted source tracks — Плавьте только подтвержденные исходные дорожкиoff (значение по умолчанию) | onПредохранитель курсировал исходные дорожки в виде off или on. Установите этот параметр на on если вы хотите соединиться, курсировал исходные дорожки. Установите его на off если вы хотите только плавить исходные дорожки, которые не курсируются.
Prediction time source — Источник времени предсказанияAuto (значение по умолчанию) | Input portИсточник в течение времени предсказания в виде Input port или Auto. Выберите Input port вводить время обновления при помощи входного порта Prediction Time. В противном случае часы симуляции, управляемые Simulink, определяют время обновления.
Enable tentative tracks output — Включите выходной порт для предварительных дорожекoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить выход предварительных дорожек через выходной порт Tentative Tracks.
Enable all tracks output — Включите выходной порт для всех дорожекoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить выход всех дорожек через выходной порт All Tracks.
Enable information output — Включите выходной порт для получения информации об анализеoff (значение по умолчанию) | onВыберите этот параметр, чтобы включить выходной порт для получения информации об анализе через выходной порт Info.
Source of output bus name — Источник выхода отслеживает имя шиныAuto (значение по умолчанию) | PropertyИсточник выхода отслеживает имя шины в виде:
Auto — Блок автоматически создает выходное имя шины дорожки.
Property — Задайте выходное имя шины дорожки при помощи параметра Specify an output bus name.
Source of output info bus name — Источник информации о выходе соединяет шиной имяAuto (значение по умолчанию) | PropertyИсточник информации о выходе соединяет шиной имя в виде одной из этих опций:
Auto — Блок автоматически создает имя шины информации о выходе.
Property — Задайте имя шины информации о выходе при помощи параметра Fuser info bus name.
Поля структуры дорожки:
| Поле | Определение |
|---|---|
SourceIndex | Уникальный исходный индекс раньше отличал источники отслеживания в среде средства отслеживания кратного. |
TrackID | Уникальный идентификатор дорожки раньше отличал несколько дорожек. |
BranchID | Уникальный идентификатор ветви дорожки раньше отличал несколько ветвей дорожки. |
UpdateTime | Время, в которое обновляется дорожка. Величина в секундах. |
Age | Число раз пережившая дорожка. |
State | Значение вектора состояния во время обновления. |
StateCovariance | Ковариационная матрица неопределенности. |
TrackLogic | Подтверждение и тип логики удаления, возвращенный как 'History' или 'Score'. |
TrackLogicState | Текущее состояние типа логики дорожки. На основе логического типа
|
IsConfirmed | Состояние Confirmation. Этим полем является true если дорожка подтверждена, чтобы быть действительной целью. |
IsCoasted | Состояние Coasting. Этим полем является true если дорожка обновляется без нового обнаружения. |
IsSelfReported | Укажите, сообщает ли о дорожке средство отслеживания. Это поле используется в среде сплава дорожки. Это возвращено как |
ObjectClassID | Целочисленное значение, представляющее предметную классификацию. Значение 0 представляет неизвестную классификацию. Ненулевые классификации применяются только к подтвержденным дорожкам. |
ObjectAttributes | Дополнительная информация дорожки. |
trackFuser | Track-Oriented Multi-Hypothesis Tracker | Global Nearest Neighbor Multi Object Tracker | Joint Probabilistic Data Association Multi Object Tracker | Track Concatenation
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.

